




- @mpt0816
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
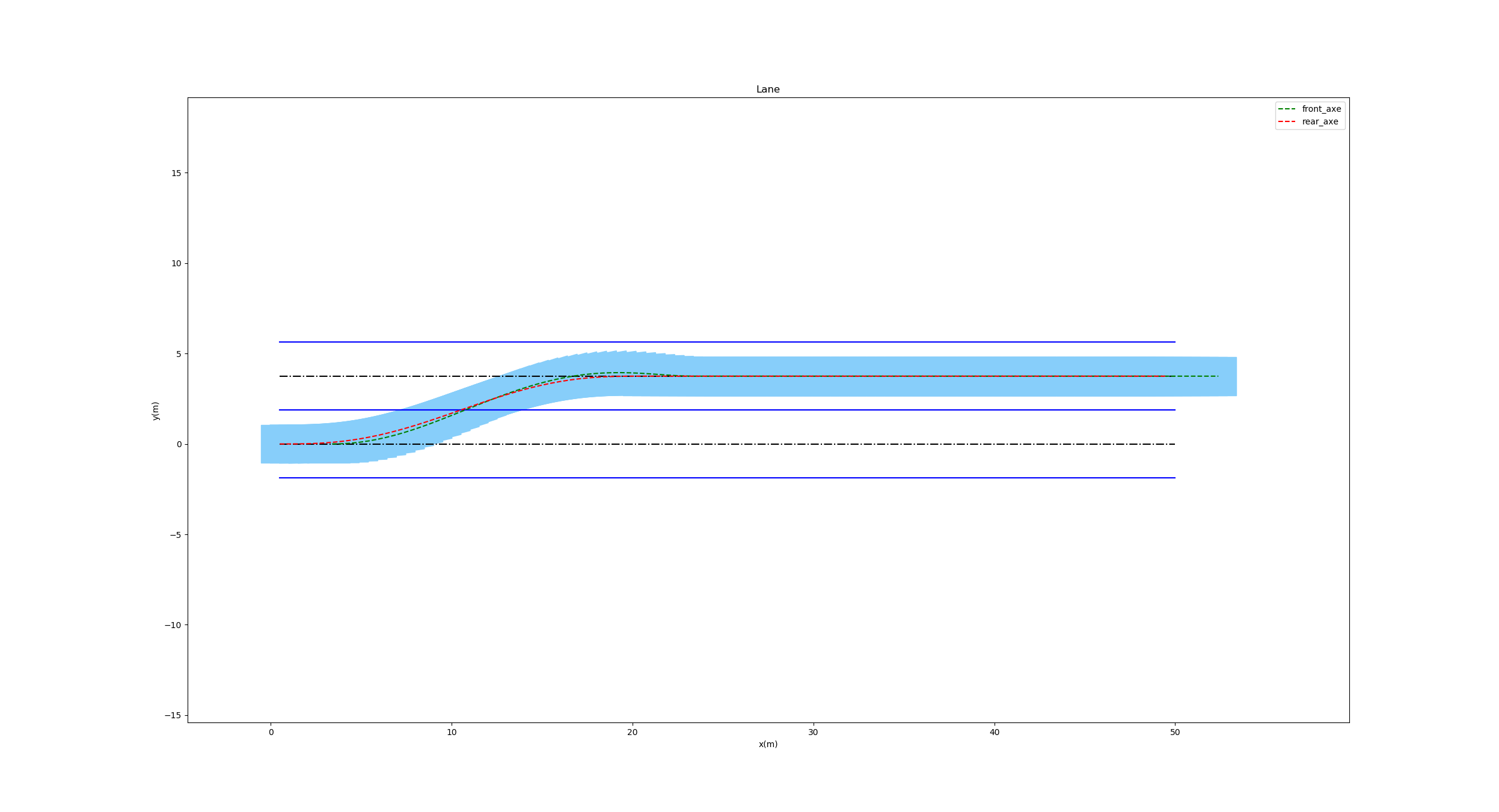
在进行路径规划时,多数使用汽车的后轴做路径规划,在多数工况下和车辆长度(乘用车)不大时,问题并不大。但是在个别工况下,使用后轴进行路径规划得到的结果并不理想。比如在很小的换道距离内完成换道,或者车辆尺寸较大,比如是大巴车,此时使用后轴规划得到了路径质量较差。下面使用LatticeLatticeLattice算法进行路径规划举例。上图是车长为4.92m4.92m4.92m的乘用车在20m20m20m
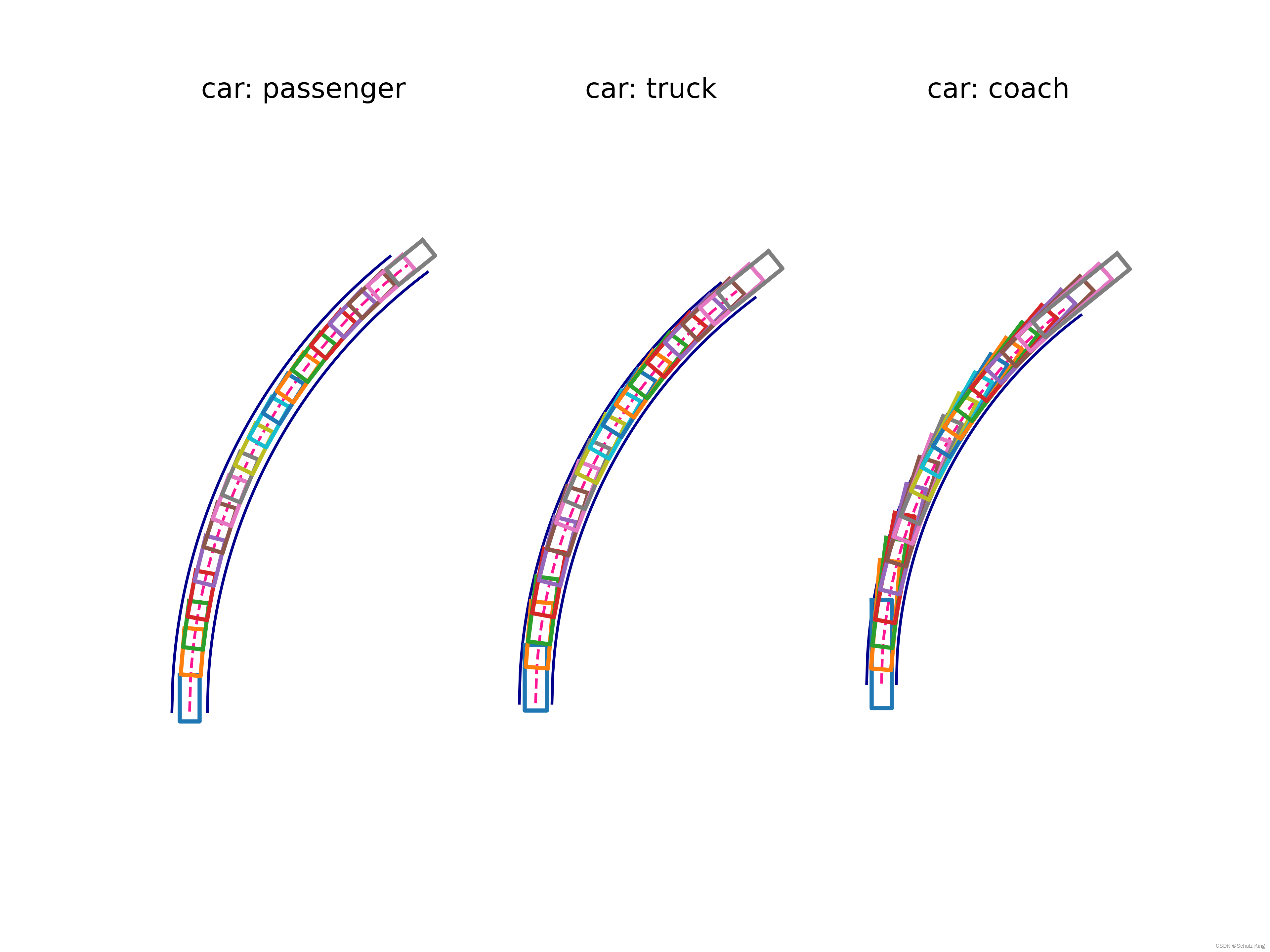
现在多数的路径规划都是基于车辆质点模型的,例如Apollo的路径规划算法。然而当车辆尺寸太大时,采用质点模型的路径规划算法,不能约束车辆的前悬或者后悬在路径边界约束内,例如下图所示。道路的半径为60m,当不同的车辆沿中心线行驶时,大型车辆的前悬会超出道路边界。因此,在此考虑车辆的尺寸约束进行路径规划,使车辆的最大范围的行驶在道路内。在进行路径规划时,不再使用质点模型,而是使用刚体或者多刚体模型,将
本文综述了自动驾驶技术从端到端系统(E2E)到世界模型(World Model)的发展路径,重点分析了五大技术方向:1. E2E系统(UniAD/VAD系列)通过BEV特征和Transformer架构实现感知-规划一体化,逐步引入矢量化表示、概率规划和生成模型;2. LLM应用(DriveLikeaHuman/DiLu)探索大语言模型在驾驶推理、解释和记忆方面的潜力;3. VLM方法(DriveV
本文综述了自动驾驶技术从端到端系统(E2E)到世界模型(World Model)的发展路径,重点分析了五大技术方向:1. E2E系统(UniAD/VAD系列)通过BEV特征和Transformer架构实现感知-规划一体化,逐步引入矢量化表示、概率规划和生成模型;2. LLM应用(DriveLikeaHuman/DiLu)探索大语言模型在驾驶推理、解释和记忆方面的潜力;3. VLM方法(DriveV
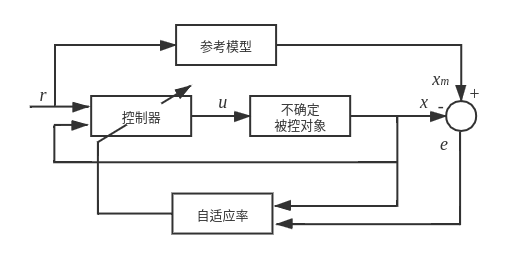
自适应控制可以在系统老化或者存在建模不确定性的情况下改善控制系统性能。自适应控制是一类处理不确定性系统的非线性控制方法,这些不确定性可能来自系统的动力学自身无法预见的变化或者外部的干扰。自适应控制系统可以广义地描述为能够基于被控对象所接受到的输入在线控制器设计参数,如控制增益,以适应系统不确定性的一种控制系统。其中,将可调参数成为自适应参数,将通过一组数学方程进行描述的调整机制称为自适应律。大多数
模型预测控制(ModelPredict Control)利用一个已有的模型、系统当前的状态和未来的控制量去预测系统未来的输出;这个输出的长度是控制周期的整数倍;由于未来的控制量是未知的,需要根据一定的条件进行求解,以得到未来的控制量序列,并在每个控制周期结束后,系统根据当前实际状态重新预测系统未来的输出。因此模型预测控制有三个关键步骤,分别是:预测模型、滚动优化和反馈校正。预测模型:预测模型是控制

自适应控制可以在系统老化或者存在建模不确定性的情况下改善控制系统性能。自适应控制是一类处理不确定性系统的非线性控制方法,这些不确定性可能来自系统的动力学自身无法预见的变化或者外部的干扰。自适应控制系统可以广义地描述为能够基于被控对象所接受到的输入在线控制器设计参数,如控制增益,以适应系统不确定性的一种控制系统。其中,将可调参数成为自适应参数,将通过一组数学方程进行描述的调整机制称为自适应律。大多数