




- @mao3332606
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
机器人运动学是轨迹规划的基础,不考虑动力学问题而是将机器人各关节看作刚体,而实际上机器人在运动过程中存在不同程度上的冲击、受力和变形,因此机器人运动学是一个在理论下的数学模型。机器人在空间中的位置可以通过向量P=[pxpypz]T表示,其中,px、py、pz分别表示P点在笛卡尔坐标系各坐标轴下的投影分量。如图所示,假设坐标系A和B分别固连在机器人的两个关节上,则B相对于A的姿态可由以下3✖3的旋转

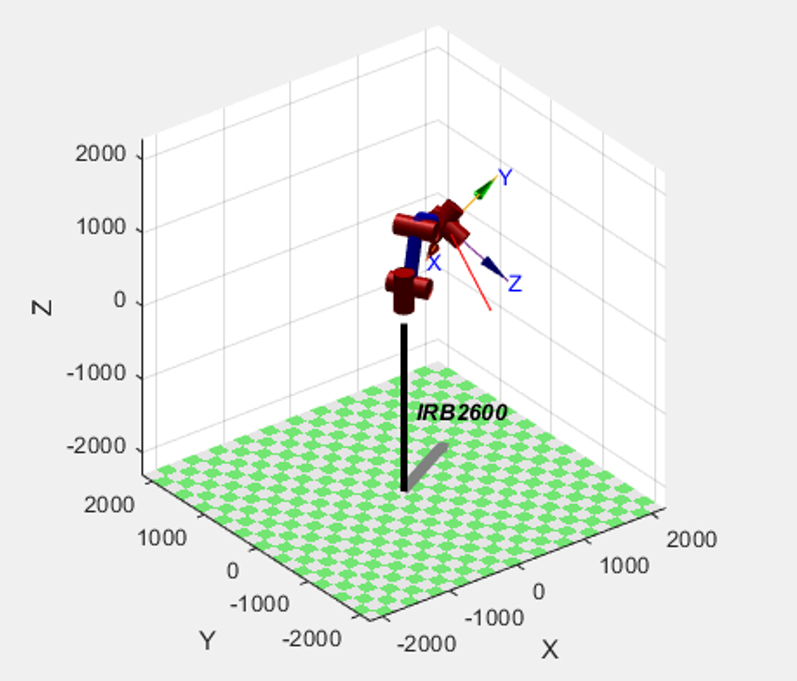
通过matlab工具箱实现了IRB2600机器人SDH和MDH建模、正逆运动学求解、关节空间和笛卡尔空间轨迹规划及仿真,并给出了所有的推导过程、代码及注释。
通过matlab工具箱实现了IRB2600机器人SDH和MDH建模、正逆运动学求解、关节空间和笛卡尔空间轨迹规划及仿真,并给出了所有的推导过程、代码及注释。
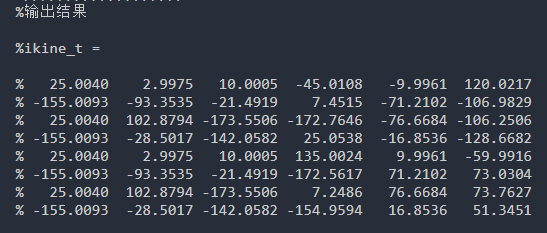
工业机器人的逆运动学求解,常用的有数值解和解析解,其中数值解是采用差值(最小二乘法)或逼近的方式得到的一组近似解,通常计算量较大,对于冗余自由度机器人较为适用。1、其中T12和T56的修改是因为在机器人的2轴和6轴均有一定角度的初始偏置,经计算验证得到的结论是:无论是否将DH参数中的初始偏置角度代入,均不影响逆解方程的结果。联合上一节的正运动学方程将各关节设置为(25°,3°,10°,-45°,
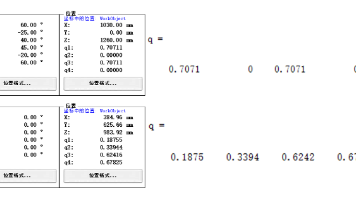
给出了旋转矩阵到欧拉角、四元数的matlab代码。针对旋转矩阵到欧拉角、四元数转换的奇异性做阈值处理和最大值判定,以保证机器人运动控制插补过程的稳定性。
工业机器人的逆运动学求解,常用的有数值解和解析解,其中数值解是采用差值(最小二乘法)或逼近的方式得到的一组近似解,通常计算量较大,对于冗余自由度机器人较为适用。1、其中T12和T56的修改是因为在机器人的2轴和6轴均有一定角度的初始偏置,经计算验证得到的结论是:无论是否将DH参数中的初始偏置角度代入,均不影响逆解方程的结果。联合上一节的正运动学方程将各关节设置为(25°,3°,10°,-45°,
通过matlab工具箱实现了IRB2600机器人SDH和MDH建模、正逆运动学求解、关节空间和笛卡尔空间轨迹规划及仿真,并给出了所有的推导过程、代码及注释。
从21年开始接触机器人学,想到还没有做过系统性的的总结,为此整理一下学习笔记,一是为了方便将来翻看,二是希望能够给有需要的同学提供一些参考。以下内容均由个人整理,如有错误和纰漏,请各位大佬帮忙指正。(4)正运动学推导过程及matlab代码(FK)(5)逆运动学推导过程及matlab代码(IK)(1)林沛群老师的机器人学课程(五星推荐)(3)机器人DH和MDH(改进)参数法建模。(2)机器人学——蔡
工业机器人的轨迹规划为位移、速度、加速度等相对于时间的函数,即建立在运动过程中空间与时间的关系。机器人的轨迹规划要考虑机器人的稳定性、加工效率、能耗等,是运动控制的基础。轨迹规划按照规划依据方式具有多种分类,一般是按照工作空间将机器人分为关节空间轨迹规划和笛卡尔空间轨迹规划。
工业机器人在关节空间中运动时,仅需控制机器人的各关节轴运动到指定角度。而在常用的抛磨、焊接等加工过程中仅考虑机器人末端的运动轨迹,即在笛卡尔空间坐标系下对机器人进行轨迹规划,因此需要给定加工点位姿,来反解机器人的各关节角度。而进行机器人的运动学逆解,就一定避不开机器人的奇异点。对于工业机器人来说,奇异点是不可避免的,属于运动机构的机械特性。一般来讲六自由度串联机器人,存在三种类型的奇异点,分别为腕