
写文章




- @m0_73974689
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
Foc基本原理讲解(简略速成版)
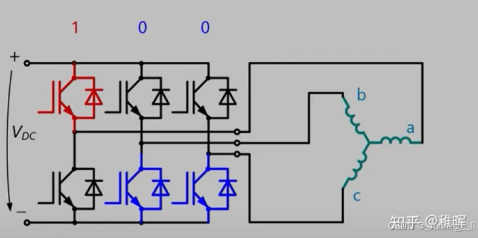
但是直接控制三相的交流电流太困难了,为了方便控制电机,我们将这三相电流通过clark和park转换成旋转坐标系下的dq轴,d轴是电机的轴向方向,q轴是电机的切向方向,通过给定不同的q轴电压,可以形成不同的q轴电流,使得电机运动。通过控制逆变电路的六个mos,是可以产生六个矢量(U1,U2,U3,U4,U5,U6),但是如何更精细的对每个角度进行控制呢,这就要用到矢量合成了,通过两个附近的易形成的矢
webots使用imu传感器(位姿传感器)实现四轮全向轮小车自旋前进,学会可拓展到其他的模型上(边自旋边沿一个方向直行)C语言版本附源码(开源)
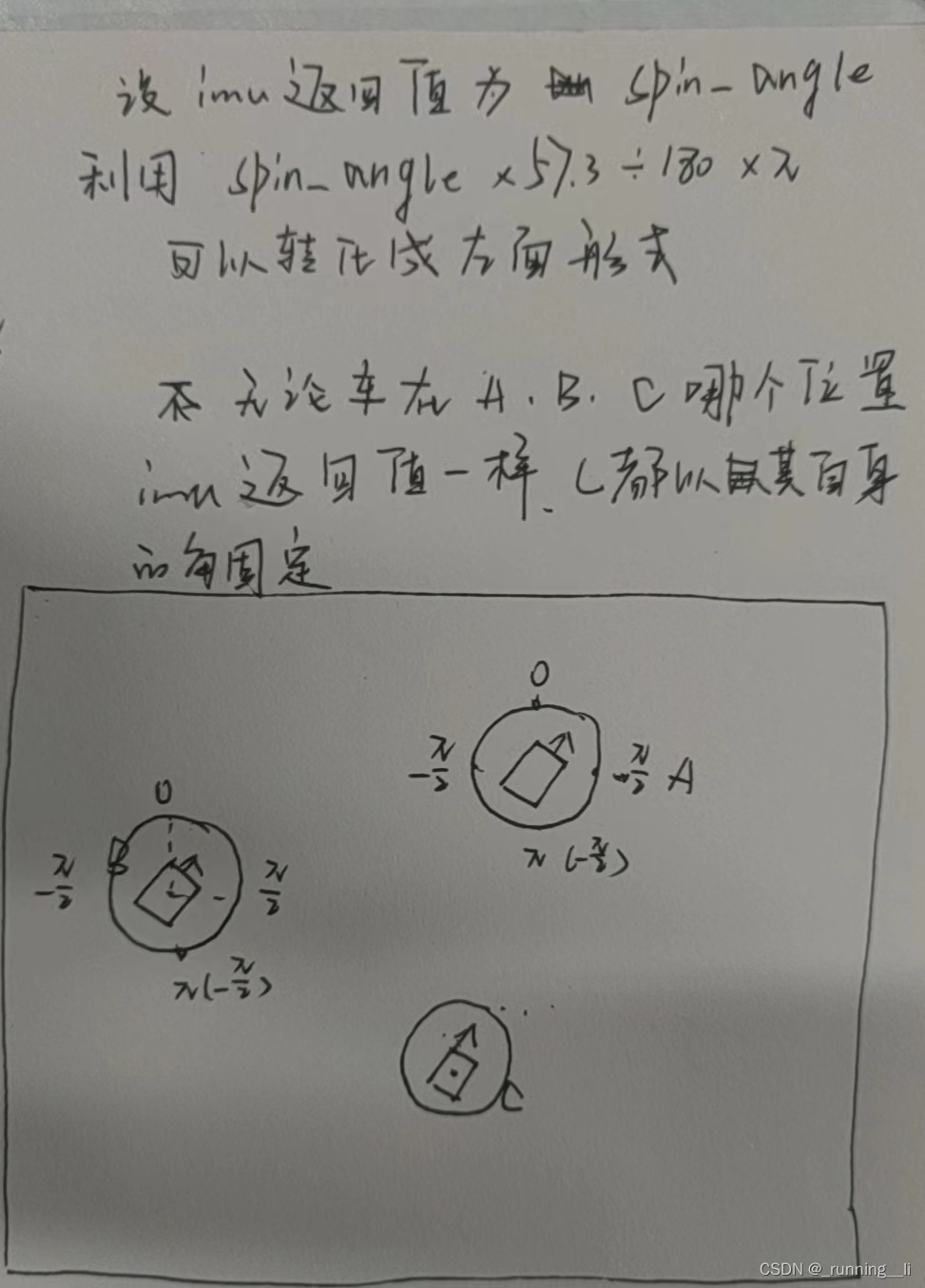
为实现上述功能,需要获取到小车的绝对角度(在地图这个大的坐标系中),在webots中我们需要的便是imu传感器(即InertralUint),在实际的运用中,一个陀螺仪的功能便包括了imu的功能。AD轮子提供一个方向的速度,BC轮子提供一个方向的速度,通过这两个方向速度的合成实现小车可以向各个方向移动,当向前移动时,两个方向速度大小相等,所以矢量三角形的角度为Π/4.这就是对imu返回值的解释,所
大学物理下机械波知识总结(一个公式搞定所有计算题,详细讲解,轻松应对期末考试)
大学物理下机械波知识总结(一个公式搞定所有计算题,详细讲解,轻松应对期末考试)机械波这章知识点概念非常多,但是你通过看自己学校的往年例题便会发现,考试的重点都在波函数,振动方程这一部分,其他的也都是这部分引申的,话不多说,进入正题。先大概说一下波函数,通俗点来说,波函数就是含一个未知数x的,时间t,的函数,用来表示不同时间的偏移量。这里可能会产生疑问了,为什么t的函数还要含有未知数x呢,这是因为在
到底了