
写文章




- @m0_62976848
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
解决科研小问题 | matlab其中是出现Fatal Start Error
解决科研小问题 | matlab其中是出现Fatal Start Error
视觉笔记向 | 图像与雷达的数据融合算法(上)
视觉笔记向 | 图像与雷达的数据融合算法(上)

视觉笔记向 | 图像与雷达的数据融合算法(下)
图像与雷达的数据融合算法

Opencv | 灰度化-最大值法、平均值法、加权平均值法
用的灰度化方法主要有如下三个:最大值灰度化法、平均值灰度化法、加权平均值灰度化法。最大值灰度化法虽然细节保留最好,但是该方法容易导致图像局部过亮,干扰识别。平均值法得到的图像细节保存的不错,但是图中的依然存在大量的噪点,相比之下,加权平均值法的细节保留较好,噪点去除的最好,并且可以较好地控制了局部过亮的情况。
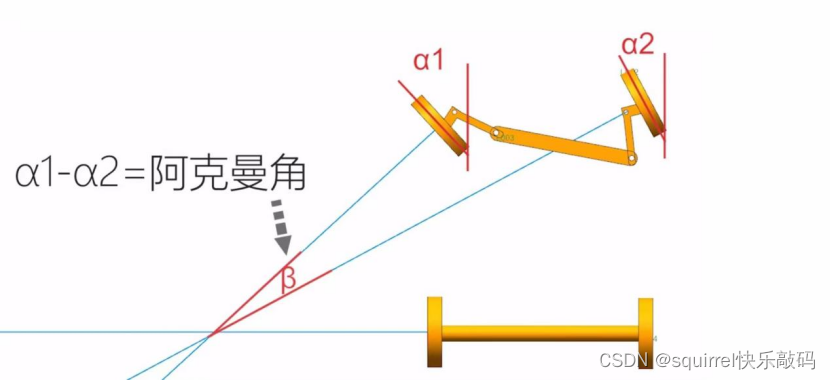
车辆 | 阿克曼转向原理及公式推导
自行车,转动前轮就能转弯,要是让前轮保持一个角度,自行车会做定圆运动,如果,车轮轴线跟着旋转,那么前轮轴线和后轮轴线的交点就是自行车做定圆运动的圆心。下图所示为车辆的阿克曼转向原理图,根据该原理设计的车辆在转弯时,利用四连杆的相等曲柄使车辆前轴内侧车轮的转角比外侧轮的转角大大约 2~4 度。自行车是两轮模型,研究轿车四轮模型,如果轿车绕后轮轴线的某一点做定圆运动的话,前轮的左右转角大小是不一样的。
到底了