- @m0_62281625
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
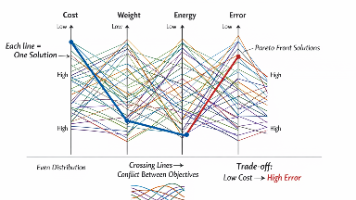
平行坐标图是多目标优化问题中常用的高维数据可视化工具。文章系统介绍了平行坐标图的概念、作用及使用方法:它将多个目标表示为平行坐标轴,用折线连接各目标值来代表一个解。这种可视化方式能直观展示解集的覆盖范围、分布均匀性、目标间的冲突关系以及特定解的权衡特点,特别适合目标数超过3的情况。虽然存在解集过多时视觉混乱、坐标轴顺序影响观察等缺点,但平行坐标图仍是分析高维多目标优化问题的重要工具,可用于展示最终
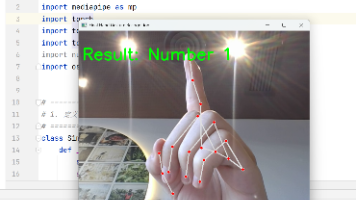
本文介绍了基于MediaPipe和PyTorch的手势识别系统开发流程。关键点包括: 环境配置:使用Python 3.9+MediaPipe 0.10.9+Protobuf 3.20.3的黄金组合解决兼容性问题 数据采集:通过MediaPipe提取手部21个关键点坐标并保存为CSV格式 模型设计:采用三层全连接神经网络(输入层42维,隐藏层64/32节点) 训练优化:使用Adam优化器和交叉熵损失
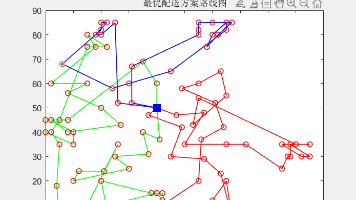
在动手写代码之前,必须先将现实问题抽象为严谨的数学模型。假设有一个配送中心(Depot,编号为000)和nnn个客户点(编号为12n12...n图的定义:完全图GVEG=(V,E)GVE,其中顶点集V012nV012...n。距离矩阵:节点iii到节点jjj的距离为DijD_{ij}Dij。客户需求:每个客户iii有确定的货物需求量qiq_iqi。车辆属性:车队中有KKK辆相同的车,每辆车的最
创新方向关键技术典型应用场景潜在优势动态自适应算法强化学习、LSTM 预测外卖配送、应急物流实时响应动态变化,减少超时率多目标分层优化目标分解、动态权重绿色物流、共享出行平衡冲突目标,提供多样化解决方案混合智能算法GNN 生成解、策略梯度电商大促、冷链物流加速收敛,提升解的质量分布式协同优化Spark 分治、多智能体协商城市配送、偏远地区物流支持超大规模问题求解,降低计算时间约束驱动优化弹性时间窗

本文介绍了基于MediaPipe和PyTorch的手势识别系统开发流程。关键点包括: 环境配置:使用Python 3.9+MediaPipe 0.10.9+Protobuf 3.20.3的黄金组合解决兼容性问题 数据采集:通过MediaPipe提取手部21个关键点坐标并保存为CSV格式 模型设计:采用三层全连接神经网络(输入层42维,隐藏层64/32节点) 训练优化:使用Adam优化器和交叉熵损失
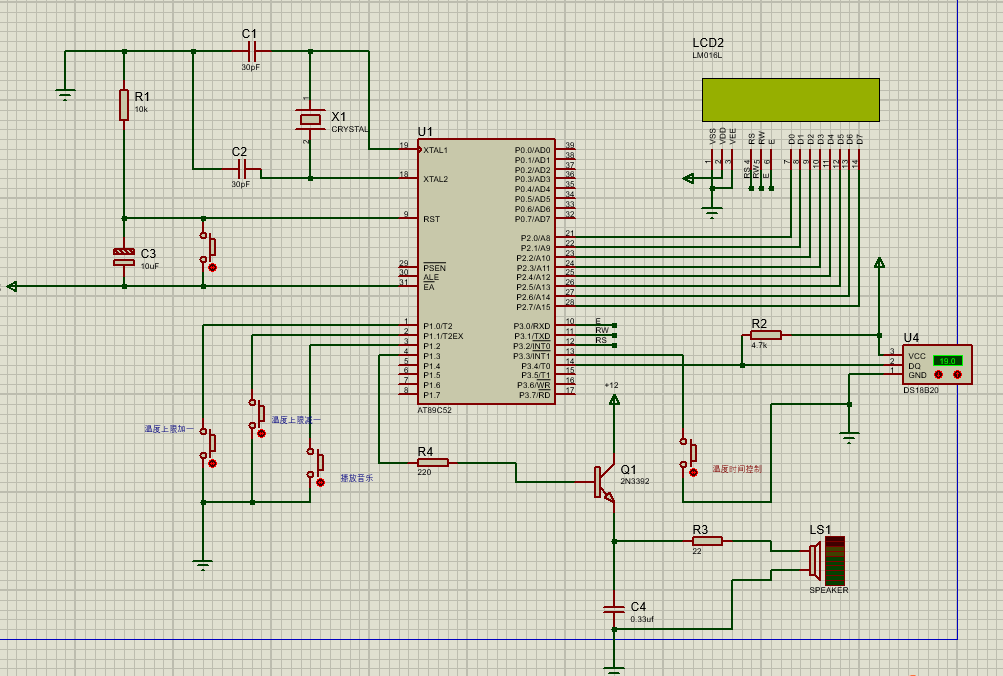
LCD1602显示