




- @m0_51638856
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
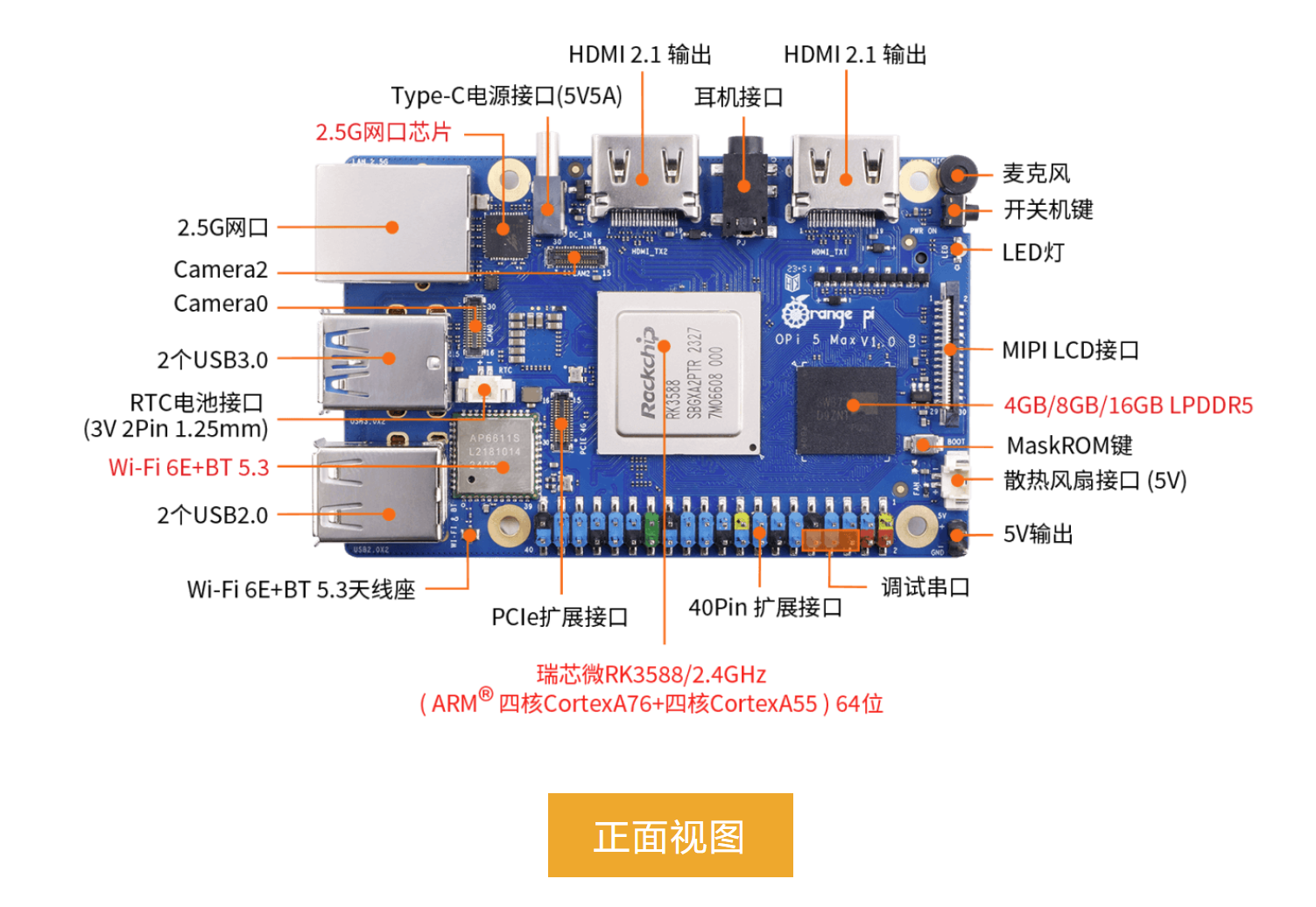
Orange Pi 5 Max 采用了瑞芯微 RK3588 新一代八核 64 位 ARM 处理器,具体为 四核 A76 和四核 A55,采用的三星 8nm LP 制程工艺,大核主频最高可达 2.4GHz, 集成 ARM Mali-G610 MP4 GPU,内嵌高性能 3D 和 2D 图像加速模块,内置高达 6 Tops 算力的 AI 加速器 NPU,拥有 4GB/8GB/16GB(LPDDR5)内
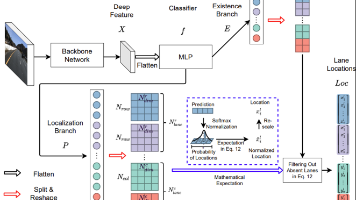
车道线检测技术面临光照变化、道路多样性、遮挡等复杂挑战。传统方法依赖手工特征(如边缘检测、霍夫变换),在结构化道路表现尚可但泛化性差。深度学习方法展现出更强适应性:Ultra-Fast系列通过行/列锚点建模车道线位置;YOLOP实现多任务联合感知;CondLaneNet和CLRNet(未展开)进一步优化检测精度。当前技术路线正从单一检测向多模态融合演进,但实时性、复杂场景鲁棒性仍是核心突破方向。(
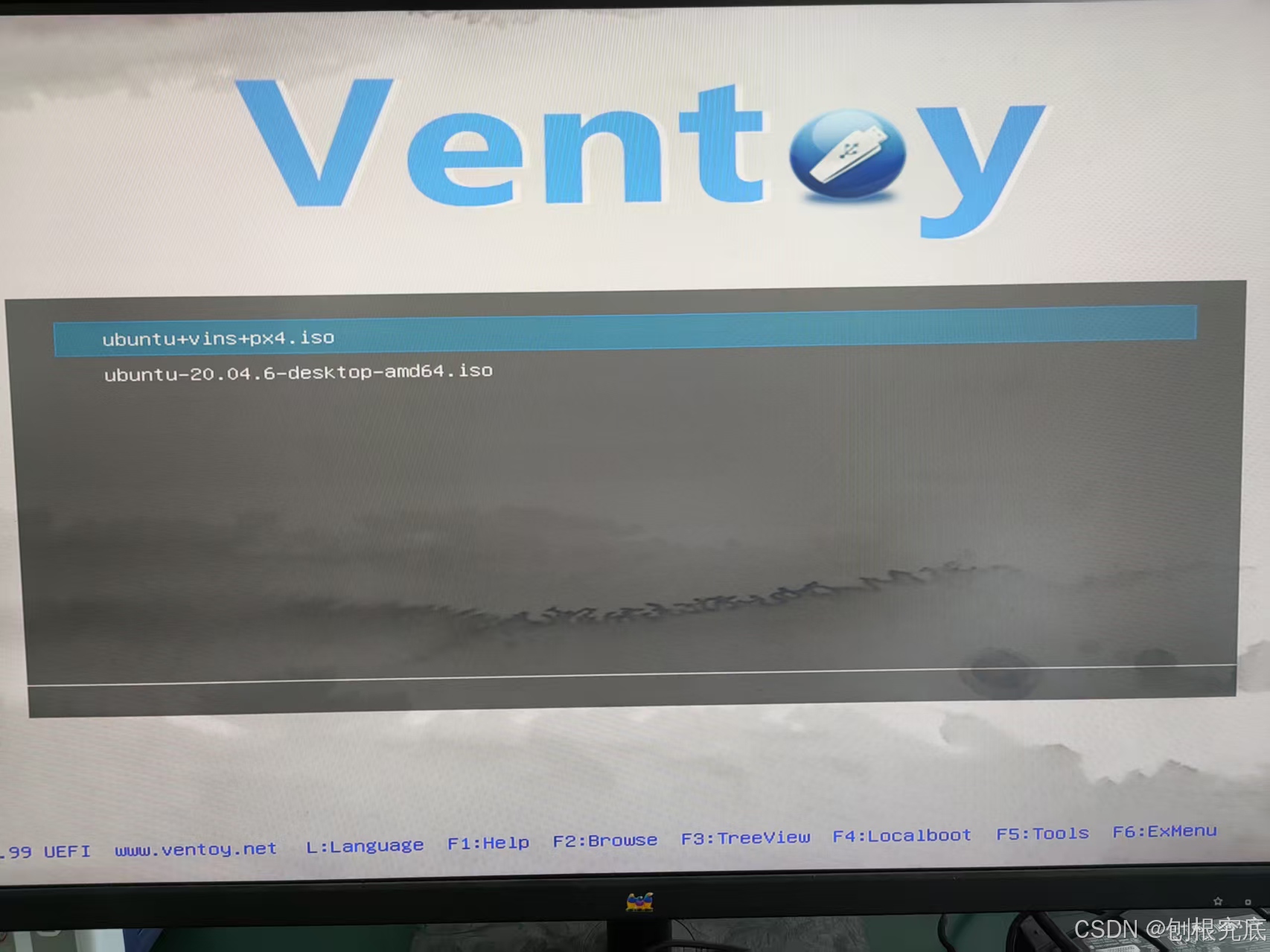
然后就可以慢慢等待系统安装了,如果出现下面报错情况,多重复几次上诉操作就ok。打开终端,输入下面指令,设置各区名称,前提是已经分好区了。然后再分别对应的挂载好分区,记得点上传递用户数据。然后就进入到镜像的桌面啦,接着继续。点击系统安装,输入自己的用户名及密码。继续点击grub2 mode进入。接着打开systemback。点击自己想还原的镜像文件。这里直接ctrl+c跳过。点击启动live系统。
YOLOv5是一个先进、快速且易于使用的实时目标检测模型,广泛应用于各种领域。它是由Ultralytics团队基于PyTorch框架开发的,相比于之前的YOLO版本(如YOLOv3、YOLOv4),YOLOv5在性能、精度和易用性上都有一些改进。主要特点:1.高效性和实时性:YOLOv5通过优化网络结构和推理过程,在高效性和实时性方面表现优异,适用于实时目标检测任务,如视频监控、自动驾驶等。2.多

本文介绍了搭建轻量级流媒体服务器的完整流程。首先安装MediaMTX流媒体服务器,作为协议转换和低延迟转发的核心组件;然后通过FFmpeg实现音视频处理功能。重点演示了USB摄像头连接后,使用FFmpeg进行RTSP推流的不同参数优化方案,包括分辨率、帧率和编码设置。最后通过VLC播放器验证RTSP流媒体服务,并展示了与YOLOv5结合实现视频分析的应用示例。整个方案具有部署简单、资源占用低的特点
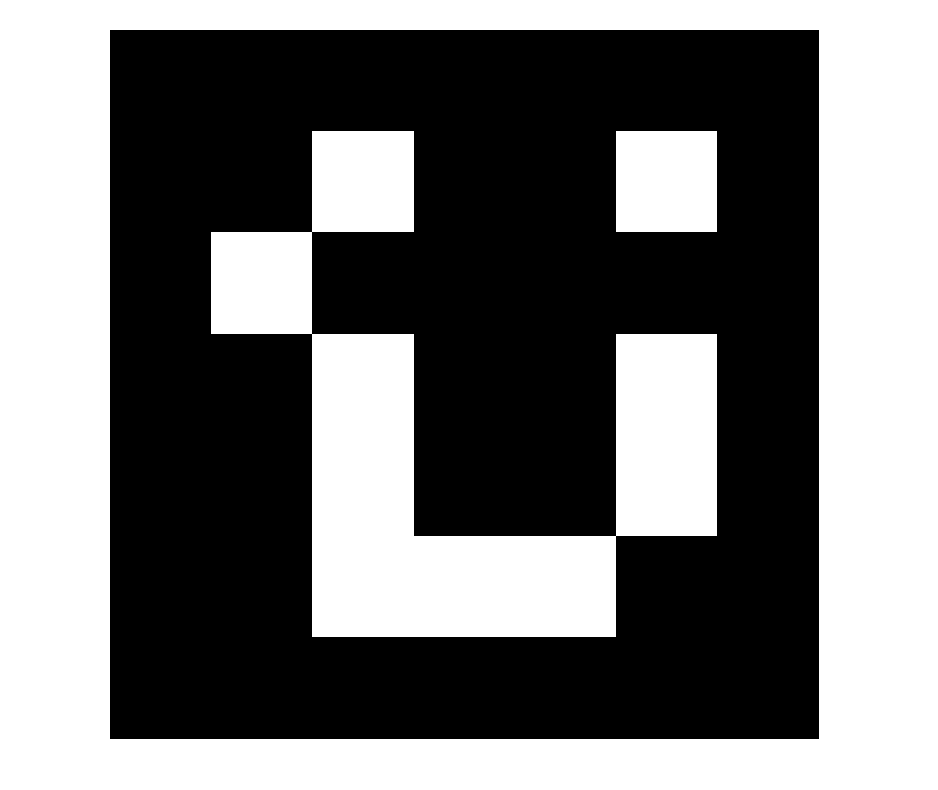
Aruco码是一种基于二进制的二维标记,通常用于计算机视觉领域,尤其是在增强现实(AR)应用中。它是一个黑白的方形图形,包含一个独特的ID,通过定位和识别Aruco码的位置来获取信息。Aruco码的优势在于其可以在不同角度、光照条件下准确地被识别。主要用于计算机视觉、机器人定位、增强现实(AR)以及三维重建等领域。例如,在AR应用中,Aruco码可以帮助设备精准地识别位置和角度,并在现实世界中叠加
YOLOv5是一个先进、快速且易于使用的实时目标检测模型,广泛应用于各种领域。它是由Ultralytics团队基于PyTorch框架开发的,相比于之前的YOLO版本(如YOLOv3、YOLOv4),YOLOv5在性能、精度和易用性上都有一些改进。主要特点:1.高效性和实时性:YOLOv5通过优化网络结构和推理过程,在高效性和实时性方面表现优异,适用于实时目标检测任务,如视频监控、自动驾驶等。2.多
Orange Pi 5 Max 采用了瑞芯微 RK3588 新一代八核 64 位 ARM 处理器,具体为 四核 A76 和四核 A55,采用的三星 8nm LP 制程工艺,大核主频最高可达 2.4GHz, 集成 ARM Mali-G610 MP4 GPU,内嵌高性能 3D 和 2D 图像加速模块,内置高达 6 Tops 算力的 AI 加速器 NPU,拥有 4GB/8GB/16GB(LPDDR5)内