




- @m0_46611008
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
最近在学习网络的时候发现,许多新论文中的网络设计中仍然沿用了之前经典网络的结构。3D点云领域有一篇热度非常高的网络Deep Closet Point(DCP),其属于Frame-toFrame的结构,attention机制是其核心,那么,如何理解attention机制呢?..................
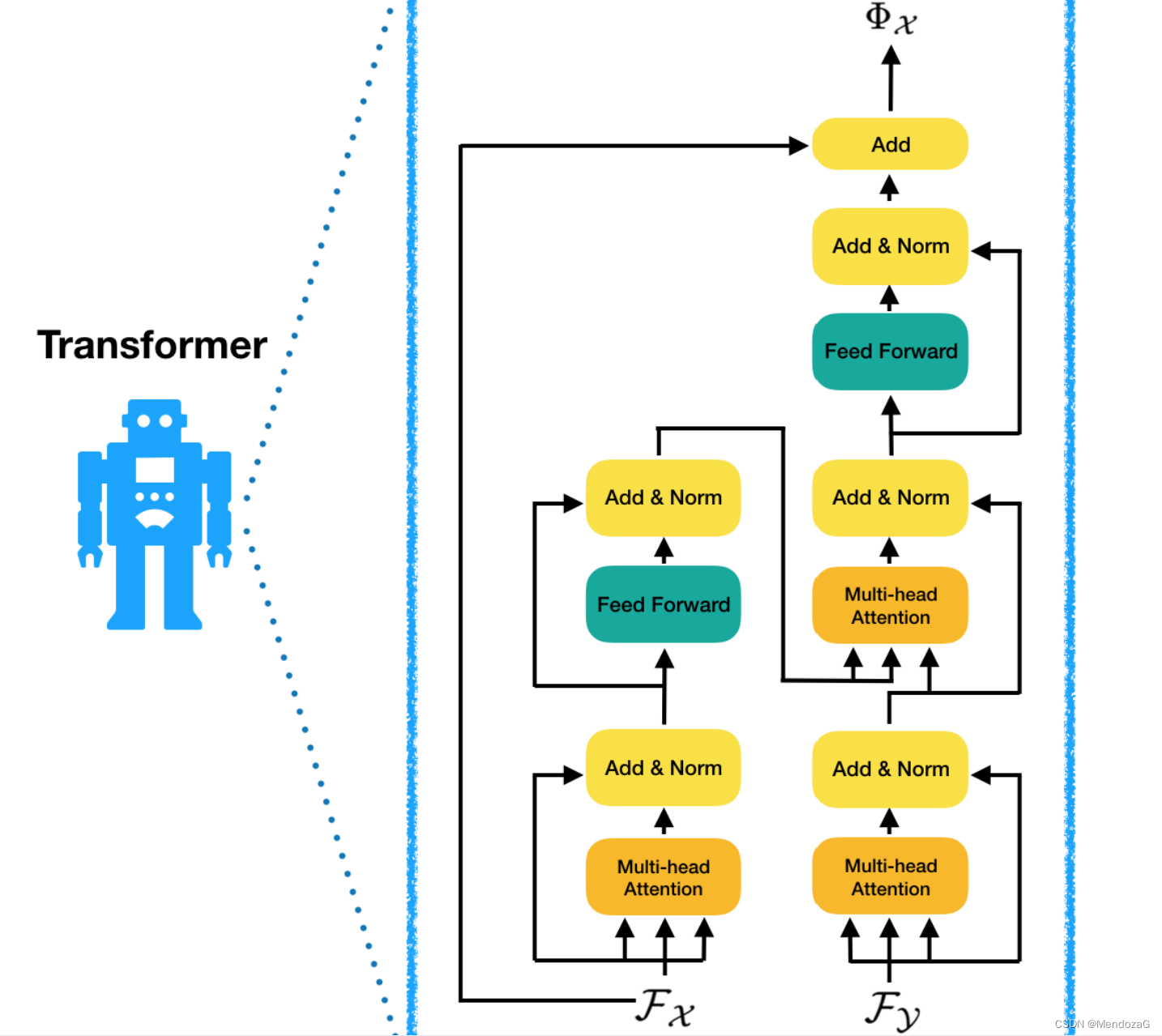
最近在学习网络的时候发现,许多新论文中的网络设计中仍然沿用了之前经典网络的结构。3D点云领域有一篇热度非常高的网络Deep Closet Point(DCP),其属于Frame-toFrame的结构,attention机制是其核心,那么,如何理解attention机制呢?..................
最近在学习网络的时候发现,许多新论文中的网络设计中仍然沿用了之前经典网络的结构。3D点云领域有一篇热度非常高的网络Deep Closet Point(DCP),其属于Frame-toFrame的结构,attention机制是其核心,那么,如何理解attention机制呢?..................
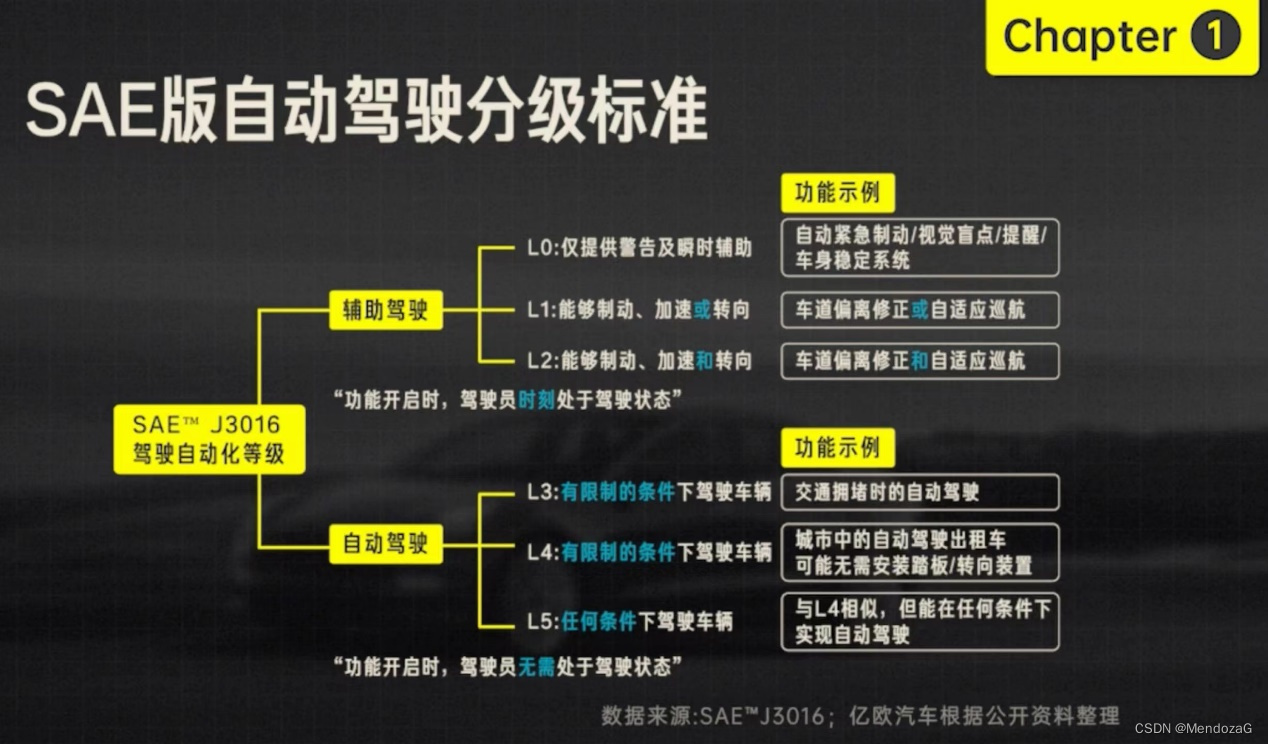
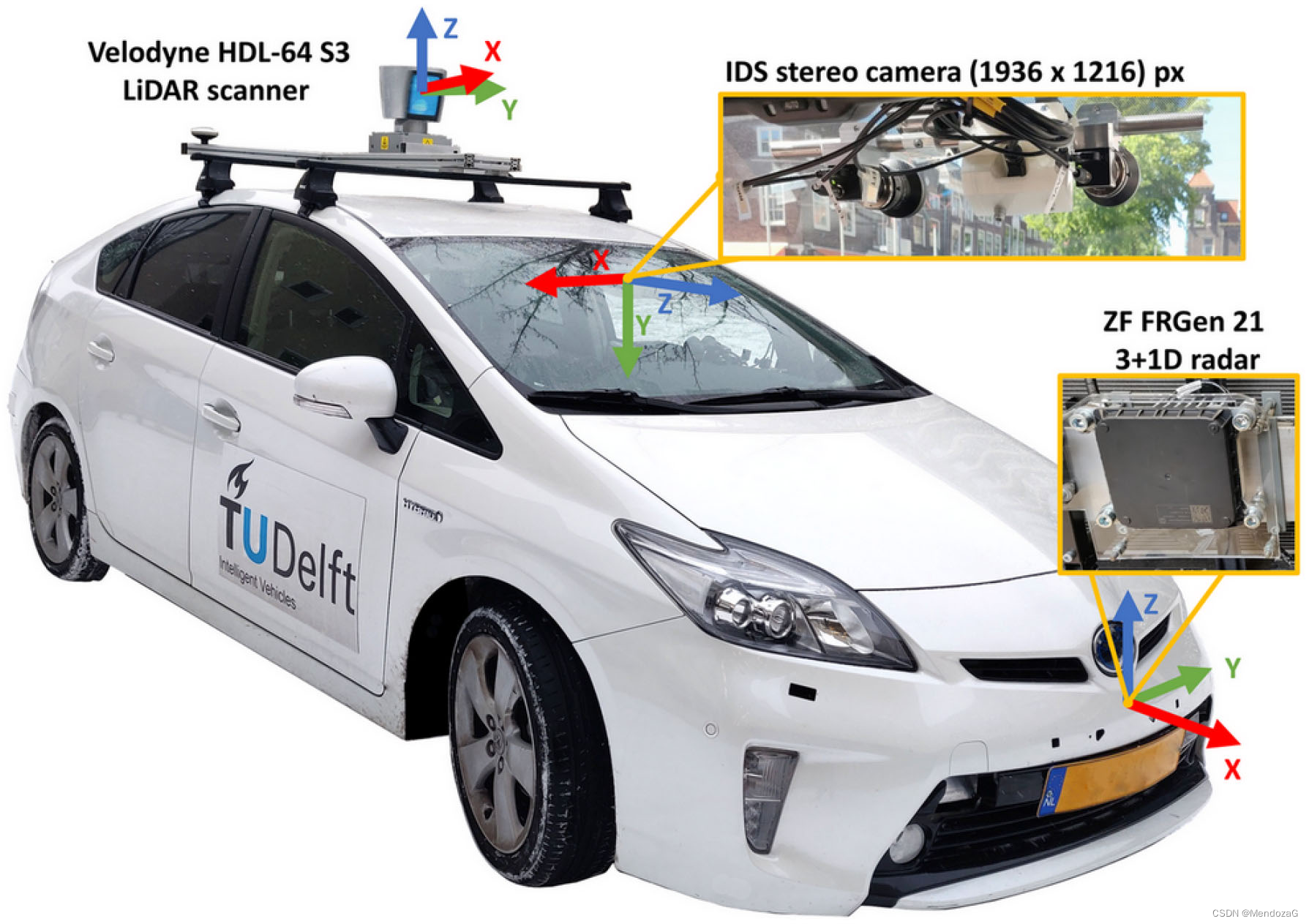
说明:本系列为自动(智能驾驶)感知融合的技术栈和思路(部分图片和资料来源于网络)本专题是将自己学到的内容整理复习一下,并分享给想学习这方面的人。本文分为2部分:自动驾驶及传感器简介、传感器标定自动驾驶根据SAE分级,分为5个等级:SAE即美国汽车工程师学会Society of Automotive Engineers)目前大多公司完成的都是L2级别的辅助驾驶,功能开启时,驾驶员处于驾驶状态,目前最
将激光雷达“跑起来”很容易,但是如何合理的应用激光雷达,你就需要去阅读手册,但是阅读手册对于许多初学者来说是十分痛苦的,特别时诸如velodyne等国外厂商给出的一百多页全英文的手册,打开就怕了,想到网上去找解析很难能找到,特别是velodyne的几乎搜不到相关信息,从而直接弃了实在可惜。本文的写作目的是解析某些激光雷达手册,从中发掘工程中需要注意或者应用到的关键点。...............

接下来就是最为重要的packet解析:有两种packet:数据包(data packet)以及位置数据包(postion packet)位置包有时被称为遥测包,或GPS包。前者包含由传感器测量的三维数据以及返回光脉冲的表面的校准反射率。前者中还包含一组方位角和一个4字节的时间戳,以及两个识别传感器模型和激光返回模式的工厂字节(Factory Byte)。如果您已经将传感器配置为与GPS时间源同步,

对于4D雷达的研究,本文将更加深入和具体地说明这几个数据集,并给出获取的方法、使用方法及注意事项等。
本文记录16线激光雷达配置需要再最前面说明的是不同版本的激光雷达配置大致相同,但是由于一般需要和其他设备如相机等协同,需要调整到同一IP,但调整IP的方式不同版本并不相同。RS-16、RS-32、RS-Bpearl 这几款雷达修改参数只能通过 rsview 去进行修改。RS-Helios、RS-Ruby、RS-Ruby-Lite 只能通过 web 修改参数(默认为192.168.1.200)。RS
对于4D雷达的研究,本文将更加深入和具体地说明这几个数据集,并给出获取的方法、使用方法及注意事项等。