- @m0_45796409
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
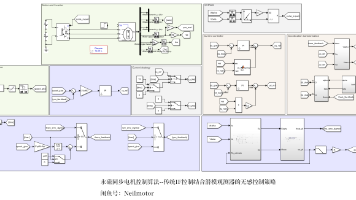
为了进一步提高永磁同步电机的抗干扰性能,采用SMDO在线估计负载扰动,然后将估计的负载扰动作为前馈信号补偿速度控制器的输出根据永磁同步电机的运动方程,可以建立滑模观测器的模型如下:式中l2为观测器的反馈增益;usmo为SMC函数;ω为角速度的观测值;TL^为SMDO观测到的负载扰动。

三段式无感控制系统,初始位置采用转子预定位法,低速阶段采用IF,中高速采用改进滑模观测器。
高频脉振方波注入法,改变传统方法从估计q轴提取误差信号的形式,通过对alpha/beta轴电流信号进行处理,提出其中的转子位置信号。本次仿真中包含三种ab轴信号处理方法。本文仿真中方波注入频率与开关频率保持一致,均为10kHz,其注入示意图如下。
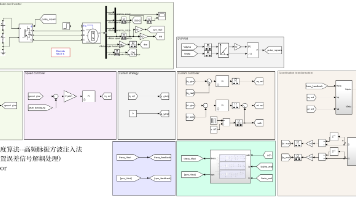
超螺旋滑模(Super-Twisting)算法是A.Levant提出的一种二阶滑模控制算法[54],目的是用来改善滑模控制系统中的抖振问题,产生抖振的一大原因就是由于符号函数 sign(s)具有开关特性以及不连续性,超螺旋滑模算法在传统滑模算法的基础上添加了连续函数,并且将产生抖振的符号函数放入到二阶导数中,非常有效地削弱了滑模存在的固有抖振,同时使滑模系统具有连续性,可有效的降低系统抖振,提高系
在非线性磁链观测器的基础之上增加零速启动算法,可以实现任意位置启动。
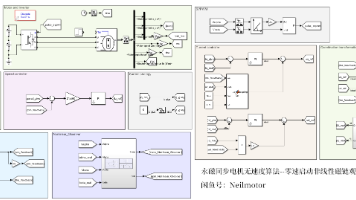
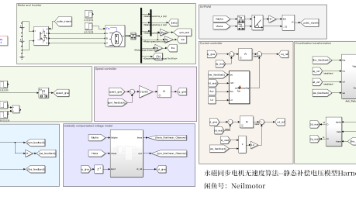
本文基于Harnefors教授提出的静态补偿电压模型,可以实现带载零速启动、正反转切换等功能,原理清晰,实现简便。
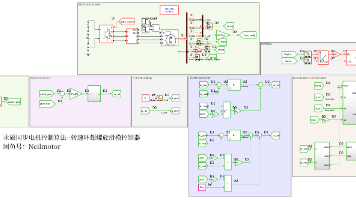
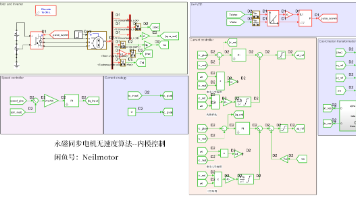
本文将对PMSM双闭环矢量控制系统的电流环分别在不采用解耦算法、采用电流反馈解耦、采用内模解耦的情况下进行研究。在电流环中,dq轴只分别存在PI控制器在考虑电流环中构成耦合量的转速、电感、电流都可以被准确测量或检测的情况下,将其按照耦合模型直接组合并负反馈于对应轴中,这便是电流反馈解耦的基本思路。反馈解耦具有完全解耦的理想情况,除了要求电感的标称参数和真实参数完全一致外,还要求系统的转速、电流的测
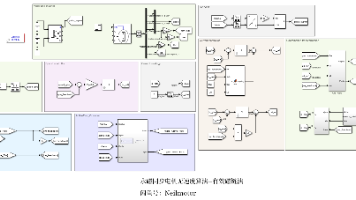
传统单电流调节器弱磁控制方法的原理是交轴电压不通过电流调节器,直接给定交轴电压值作为交轴电流调节器的输出,而直轴电流的给定值由速度调节器控制,这就意味着最终的电压控制信号是由一个电流调节器和一个固定交轴电压信号组成的。传统的定交轴电压弱磁控制算法给定交轴电压 UFWC为定值,电机工作点在加载过程中沿负载曲线移动,但是电机的带载能力与效率会互相矛盾。

当永磁同步电机在进入弱磁区域之前,电机的直轴电压和交轴电压可以分别通过直轴电流和交轴电流进行独立调节,从而达到各自所需的值;
采用基于有效磁链的混合磁链观测器,消除直流偏置误差的同时,得到电机转速与转子位置的相关信息。该方案对于IPMSM和SPMSM都可以适用。