




- @lwz45698752
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
答辩前吸一下欧气(转自B站视频)
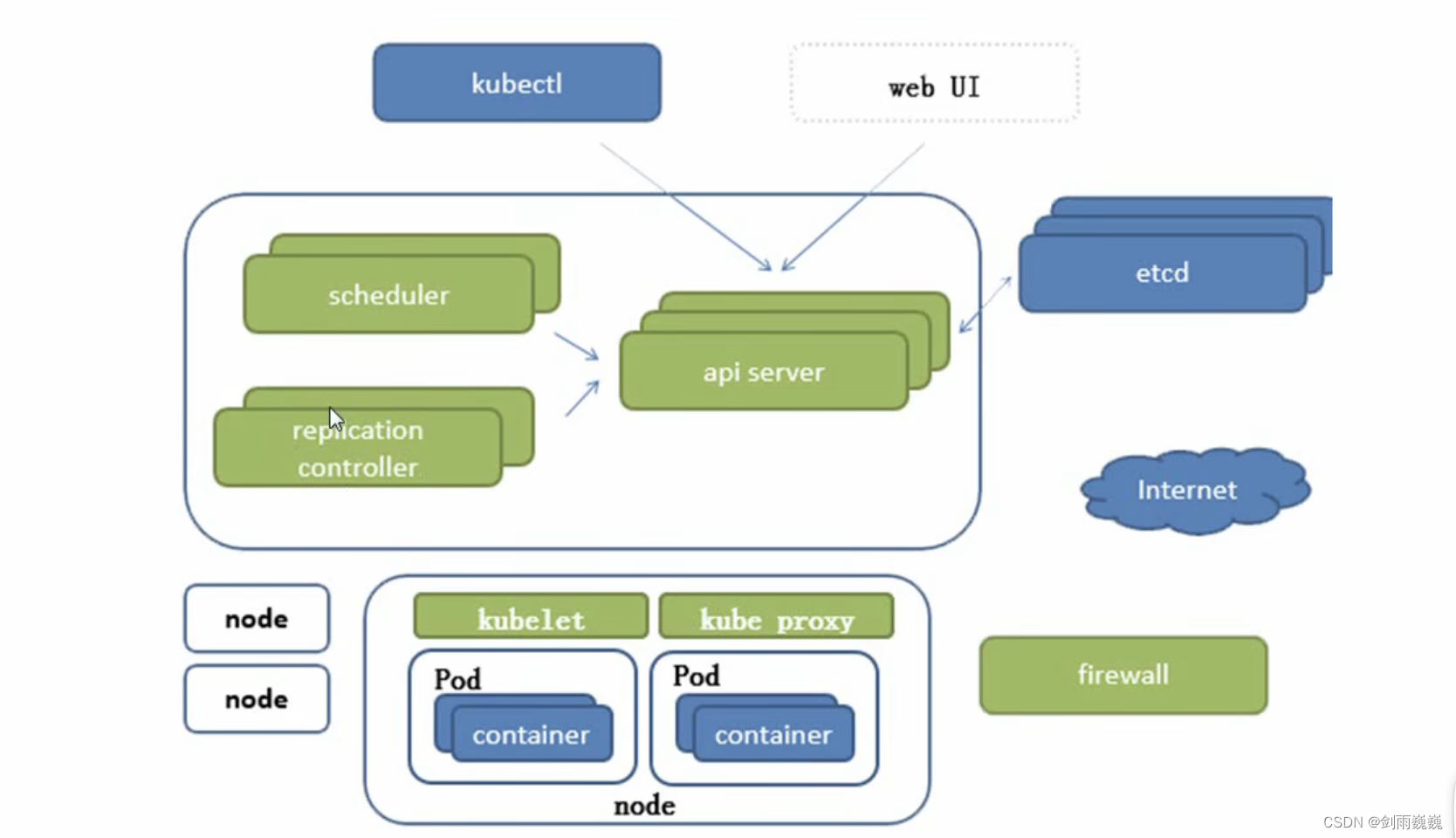
K8S即将成为企业技术平台标准,平台具体为标准交互平台云计算交互标准分为三类,如IAAS(基础设施即服务),平台即服务(新浪云)和软件即服务(在线编辑Word)新浪SAE,免运维的云平台具体模式为:PAAS用户下单给云厂商——>云厂商使用自动化工具完成运维环境构建,问题在于要根据不同类型APP匹配对应环境docker:自动构建运维环境的封装体,成为PAAS的下一代标准容器port映射到本机p

前言CICD已经成为业界主流,Tekton作为Google亲自drive的项目,重要性不言而喻要做吃螃蟹的人,长江后浪推前浪,把前浪拍死在沙滩上开坑Tekton,第一阶段主要focus在Tekton官方手册上,了解基本用法Tekton与k8s息息相关,间或穿插k8s相关Tekton的定位一言以蔽之:next generation engine应用场景实例:push代码到GitHub上,自动trig
答辩前吸一下欧气(转自B站视频)
创建MIDI音乐播放器创建音效应用程序,包括BeatBox Drum播放机,涉及创建Swing GUI,网络连接,连接到输入,输出设备JavaSoundAPI放在J2SE类函数库的一组类与接口,分为两部分:MIDI)和取样。MIDIMusic Instrument Digital Interface,不同电子发声装置沟通的标准协议,本身不具备声音,带的是有MIDI播放功能装置的
Fighting!前言学习苦旅,机器人走起!参考教材:《机器人学导论》学习目标:机器人运动学+动力学+控制策略呈现成果:UR5机械臂上实现柔顺控制坚持就是胜利,不要向困难低头要向困难下跪。。。概述聚焦机械臂最重要内容:力学与控制八仙过海各显神通:机械工程师研究机器人动态和静态特性,数学家为描述空间运动和操作臂的其他属性设计数学工具,控制理论提供设计与评估算法,用来实现...
文章目录机器人操作的定义:通过某机构使零件和工具在空间运动-----》需要描述这些部件的位姿
文章目录ROS概述ROS特点ROS安装总结ROS架构ROS架构设计OS层中间层应用层计算图节点消息话题服务文件系统开源社区ROS概述机器人硬件越来越丰富,软件代码的复用性和模块化开发需求越发强烈——》亟需机器人通用软件框架——》ROS脱颖而出定位:机器人通用软件框架地位:机器人领域的事实标准ROS集成了大量的工具,库,协议,提供类似OS所提供的功能,简化对机器人的控制分布式结构(R...
2018.7.26开发环境为AS时,添加外部库的方法将依赖包放置于Libs下,再配置project dependency从而自动导入包安卓图标下载网址:http://www.iconpng.com/series/562...