




- @lincyang
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
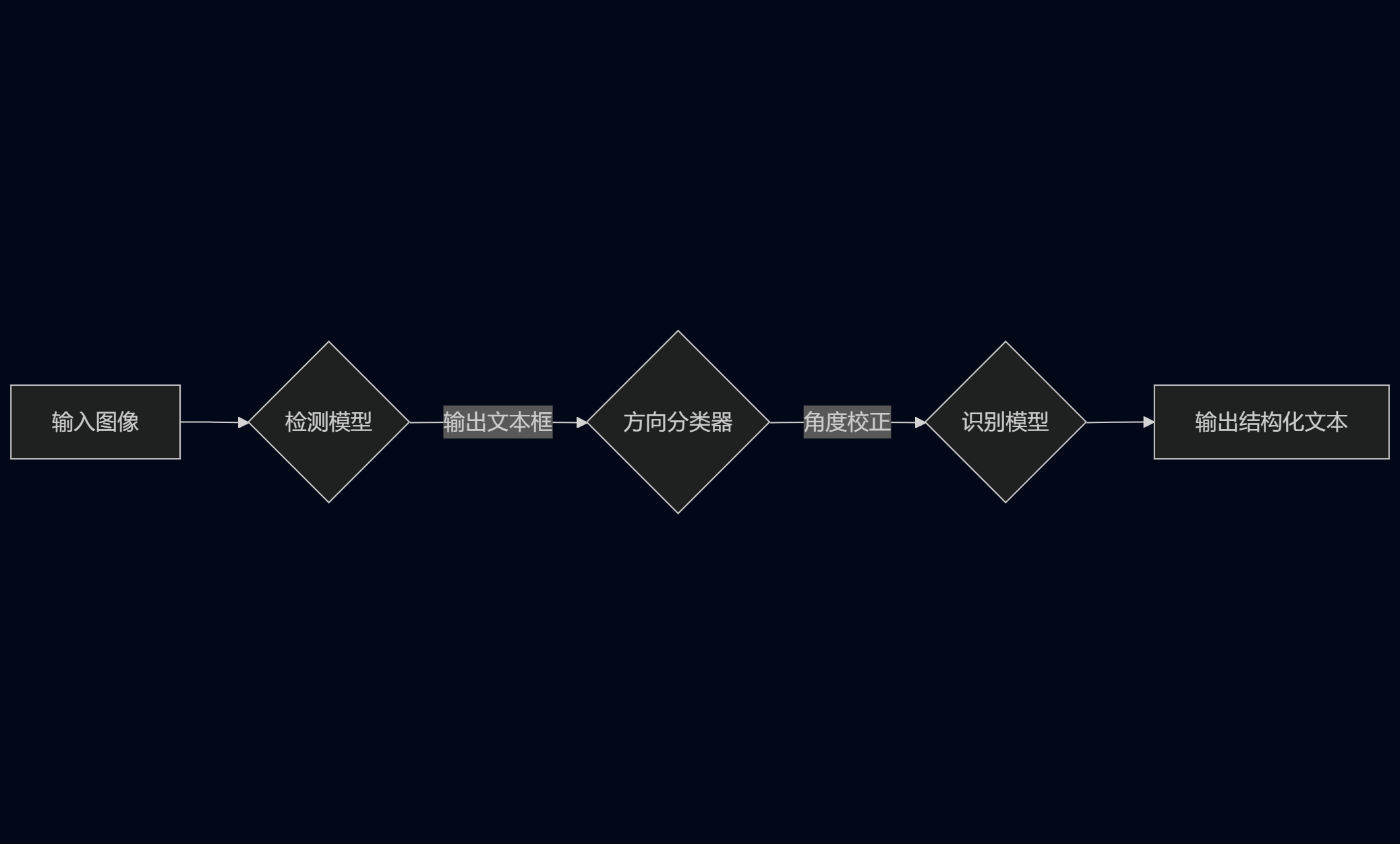
之前有两篇文章是关于PP-OCRv5的ONNX部署的,使用的还都是python。而我真实的目的,是要将PP-OCRv5直接用在C#应用和Android应用上。毕竟很多场景就是这样纯粹。后来对比了手搓ONNX方案和OnnxOCR,毅然选择了后者,确实有很多出彩的地方。所以,今天我想先把OnnxOCR的python实现,转为C#实现。这样,离线桌面OCR用户就有福了。

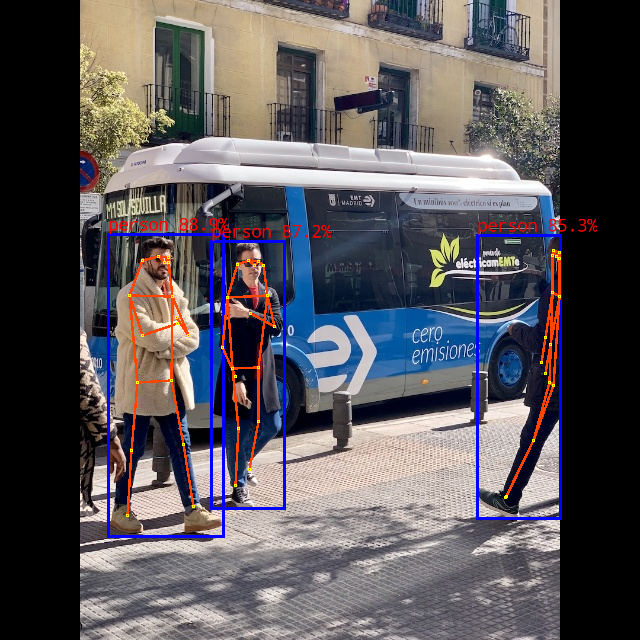
目标是赋予计算机类似人类的视觉理解能力,通过算法对图像或视频中的目标进行识别、跟踪和语义理解。其核心是研究如何从二维图像反推三维世界的结构和规律。例如,自动驾驶中通过多摄像头融合实现道路场景理解,属于典型的CV任务。

公司近期购置了两块开发板(Android),一个是RK3288另一个是RK3588。前者应对普通嵌入式场景,后者主打AI机器视觉(边缘计算设备)。下面找了些资料做个对比。一、 制程与架构RK3288采用28nm HKMG 工艺,集成四核Cortex-A17CPU,主频最高1.8GHz,搭配,支持OpenGL ES 3.0、DirectX 11等图形接口。RK3588采用8nm LP 工艺,采用四核

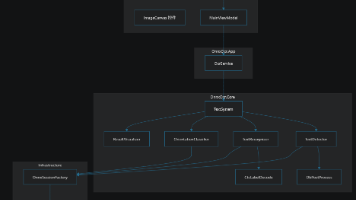
PPOCR-Det核心功能实现**文字区域检测**,基于DB++(Dynamic Binarization++)算法改进,支持多尺度特征融合和自适应阈值预测。
RKNN-Toolkit2支持的深度学习框架包括Caffe、TensorFlow、TensorFlow Lite、ONNX、DarkNet和PyTorch。

本文将在RKNN Docker环境中编译YOLOv8-Pose C Demo,并通过adb工具部署到RK3588开发板。
从V1到V4,MobileNet的演进体现了轻量化模型设计的三大趋势:**自动化架构搜索**、**硬件协同优化**与**通用性提升**。随着MobileNet V4在移动生态中的普及,边缘智能将加速渗透至智能安防、工业检测、远程医疗等领域。

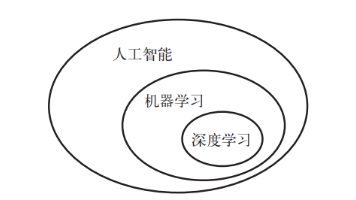
本文介绍了深度学习框架TensorFlow与Keras的核心概念及安装使用。TensorFlow是Google开源的工业级深度学习引擎,提供灵活性和跨平台支持;Keras则是高级API,以简洁易用著称。二者在TensorFlow 2.0中整合,形成互补关系。文章详细讲解了张量、神经网络层和模型构建等基础概念,并提供了从环境配置到验证安装的完整指南,最后通过MNIST手写数字识别的"Hel
是由开发者“虾哥”于2024年12月在GitHub上开源的AIoT项目,目标是打造一个低成本、可语音交互、能控制物理设备的边缘AI助手终端。到了今天,项目的描述被精炼概括为:一个基于MCP的聊天机器人|An MCP-based chatbot。作为语音交互入口,小智AI聊天机器人利用Qwen/DeepSeek等大型模型的AI功能,通过MCP协议实现多终端控制。基于 ESP-IDF 的嵌入式固件;配
