




- @joyopirate
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:本文介绍了OpenCV中calibrateHandEye函数在机械臂手眼标定中的应用,包括"眼在手上"(Eye-to-Hand)和"眼在手外"(Eye-in-Hand)两种模式的实现原理。对于"眼在手上"模式,直接使用机械臂末端到基座的变换矩阵;对于"眼在手外"模式,只需对输入矩阵求逆即可复用同一函数。文章通过坐标系变换公式推导证明了两种模式的数学等价性,并说明了3D相机(RGBD/线扫相机
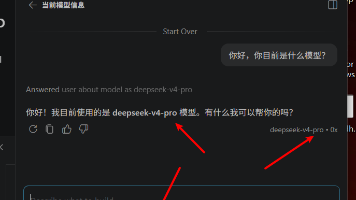
本文介绍了如何通过OAI Compatible Provider for Copilot插件将DeepSeek模型接入Copilot。操作步骤包括:安装插件后,在设置面板搜索"oai",将DeepSeek的API地址https://api.deepseek.com填入Base URL;然后在Copilot模型管理中新增OAI Compatible模型并输入DeepSeek的AP
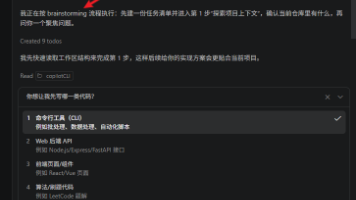
本文介绍了在VS Code中安装superpowers技能库的两种方法:通过Github Copilot插件管理页面直接安装,或通过Github Copilot CLI命令行安装。针对Windows系统下的常见问题,提供了详细的修复方案,包括添加Git Bash环境变量、修改PowerShell执行策略以及修复hook文件语法错误。最后通过模糊指令测试验证了技能库的成功安装和使用。该技能库可有效提
这篇文章介绍了一个PowerShell脚本,用于将VS Code的数据从C盘迁移到D盘以释放空间。主要内容包括: 脚本功能:迁移.vscode(扩展插件)、workspaceStorage和CachedData三个目录到D盘,并创建Junction链接保持原路径可用。 使用方法: 将代码保存为migrate-vscode.ps1文件 以管理员身份运行PowerShell执行脚本 执行前需关闭所有V
公司突然安排了个人脸识别的任务,要求能够通过摄像头识别当前工位的操作人员的身份。然后我就找人脸识别的库(不是人脸检测,而是识别),没想到还真的找到一个。SeetaFace6库及源代码及例程:https://github.com/seetafaceengine/SeetaFace6介绍:http://leanote.com/blog/post/5e7d6cecab64412ae60016ef#tit
本文介绍了如何在Windows系统下搭建本地AI服务环境。首先从官网下载安装LM Studio并开启本地网络服务,随后在WSL中安装Ubuntu系统。接着安装Hermes智能代理工具,并通过关闭防火墙实现WSL访问Windows本地服务。重点说明了如何配置Hermes的大语言模型,包括设置自定义端点、调整上下文大小等参数优化。最后展示了将Hermes接入微信的配置过程,实现通过微信与本地AI聊天的
本文介绍了如何通过OAI Compatible Provider for Copilot插件将DeepSeek模型接入Copilot。操作步骤包括:安装插件后,在设置面板搜索"oai",将DeepSeek的API地址https://api.deepseek.com填入Base URL;然后在Copilot模型管理中新增OAI Compatible模型并输入DeepSeek的AP
本文介绍了在VS Code中安装superpowers技能库的两种方法:通过Github Copilot插件管理页面直接安装,或通过Github Copilot CLI命令行安装。针对Windows系统下的常见问题,提供了详细的修复方案,包括添加Git Bash环境变量、修改PowerShell执行策略以及修复hook文件语法错误。最后通过模糊指令测试验证了技能库的成功安装和使用。该技能库可有效提
本文介绍了在VS Code中安装superpowers技能库的两种方法:通过Github Copilot插件管理页面直接安装,或通过Github Copilot CLI命令行安装。针对Windows系统下的常见问题,提供了详细的修复方案,包括添加Git Bash环境变量、修改PowerShell执行策略以及修复hook文件语法错误。最后通过模糊指令测试验证了技能库的成功安装和使用。该技能库可有效提
本文介绍了如何通过OAI Compatible Provider for Copilot插件将DeepSeek模型接入Copilot。操作步骤包括:安装插件后,在设置面板搜索"oai",将DeepSeek的API地址https://api.deepseek.com填入Base URL;然后在Copilot模型管理中新增OAI Compatible模型并输入DeepSeek的AP