




- @jndingxin
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
要判断一个字符串是否为16进制字符串,可以遍历字符串中的每个字符,并检查它们是否都是合法的16进制字符(即0-9和A-F或a-f)。

cpu架构:x86操作系统:ubuntu18.04受够了TensorRT+cuda+opencv+ffmpeg+x264运行环境的部署的繁琐,每次新服务器上部署环境都会花费很大的精力去部署环境,听说nvidia-docker可以省去部署的麻烦,好多人也推荐使用docker方便部署,咱也在网上搜索了下,学习了下,根据网上的资料,开始安装docker学习一下,把学习记录记在这儿,听说要想使用GPU,就
cv::CalibrateRobertson 是 OpenCV 中用于相机响应函数(CRF, Camera Response Function)校准的具体实现类之一,它继承自 cv::CalibrateCRF 抽象基类。该类实现了 Robertson 等人提出的算法,通过分析一组不同曝光度的图像来估计相机的响应曲线,这对于高动态范围(HDR)成像非常重要。

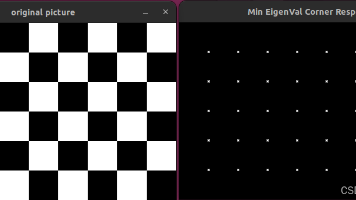
该函数创建一个 基于最小特征值(Minimum Eigenvalue)的角点响应计算对象,这是另一种经典的角点检测方法(类似于 Shi-Tomasi 角点检测器)。
该函数在 GPU 上执行二值图像的连通域标记操作,即将图像中所有相连的前景像素区域赋予相同的标签(label),以便后续分析和处理。返回的 labels 是一个与输入图像大小相同的数据矩阵,其中每个像素的值表示它所属的连通域编号(从 0 开始)。
ROS 2(Robot Operating System 2)的设计目标之一就是支持分布式系统,允许不同计算机上的节点通过网络进行通信。这种能力使得ROS 2非常适合于多机器人协作、远程操作以及任何需要跨多个计算设备分配处理任务的场景
cv::TrackerNano 是 OpenCV 中的一个轻量级目标跟踪器,主要用于实时应用,尤其是在计算资源有限的情况下。cv::TrackerNano 的设计目的是为了提供一个简单且高效的跟踪解决方案,适用于对性能要求较高的场景。

在 Ubuntu 中创建桌面快捷方式通常涉及到创建一个 .desktop 文件,这是一种用于描述应用程序启动器的标准格式。下面是一个简单的步骤指南,说明如何在 Ubuntu 中为一个程序创建桌面快捷方式。

cv::TrackerVit 是 OpenCV 中的一个视觉跟踪器类,它是基于 ViT(Vision Transformer)架构的一种实现。ViT 是一种用于图像识别的深度学习模型,近年来在计算机视觉领域取得了显著的效果。

cpu架构:x86操作系统:ubuntu18.04受够了TensorRT+cuda+opencv+ffmpeg+x264运行环境的部署的繁琐,每次新服务器上部署环境都会花费很大的精力去部署环境,听说nvidia-docker可以省去部署的麻烦,好多人也推荐使用docker方便部署,咱也在网上搜索了下,学习了下,根据网上的资料,开始安装docker学习一下,把学习记录记在这儿,听说要想使用GPU,就