




- @huqinweI987
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
写这个的原因:一来好像没怎么搜到别人手动实现,作为补充;二来巩固一下基础。卷积操作示意先从一张示意图说起,卷积基础概念和操作步骤就不啰嗦了,只讲这张图,大意就是,有in-channel,有out-channel,你需要把in-channel都做卷积操作,然后产出out-channel,所以这个w是要层层拆解,w分拆成w0和w1,以对应2个out-channel。w0分拆成...
这里写三种实现,一种是vanilla,一种是效率更高的写法,还有一种是作为网络层的实现方法。虽然dropout的参数叫probability,一般指的不是扔的几率,是keep的几率(因为代码更好解释?)。(但是不固定,注意一致性,自恰即可)vanilla dropout的前向传播网络示意:作为对照组,给出了predict不乘以p的结果,随着数据量或者数据维度的增大,可以看到最后总...
事发过程与问题:使用VS建过C#的工程,再打开C++工程,新建一个项目,空工程,找不到配置属性页(可能也经历过一些自动关键和断电之类的异常情形,但不确定是导致bug的原因)。使用包括win32控制台程序等多种方式,都不存在C/C++页,而同解决方案的其他旧工程正常。解决方式:随便编译一次新加工程,页签恢复对此只能解释为bug后续:在此之后,重启VS,新建项目,现象没缓解,暂时需要编译每...
学习的话,用linux还是比较好,但是双系统虚拟机跑的话只能用CPU,太慢了,所以还是要装windows,用上我的两块GPU。因为是照着别人的搭配选择的版本,整体来说比较简单,除了一些网络问题和等待,没太大的阻碍,比linux下默认自带python3的anaconda弄需要python2的caffe简单多了(手动滑稽)。过于详细的流水教程就不写了,网上很多了,主要列一些自己遇到的坑。...
学习的话,用linux还是比较好,但是双系统虚拟机跑的话只能用CPU,太慢了,所以还是要装windows,用上我的两块GPU。因为是照着别人的搭配选择的版本,整体来说比较简单,除了一些网络问题和等待,没太大的阻碍,比linux下默认自带python3的anaconda弄需要python2的caffe简单多了(手动滑稽)。过于详细的流水教程就不写了,网上很多了,主要列一些自己遇到的坑。...
问题点:相机坐标是(5,0,0)^T,世界坐标点位置是(100,0,0)^T,相机坐标系下,这个点肯定是100-5,是(95,0,0)^T,但是又因为相机“位姿”是(5,0,0)^T,直接左乘相机“位姿”就得到了第一个结果"Pc=105 0 0,这明显和预期不一样,按照这种T的声明与定义,需要左乘T的逆才能得到预期的结果“Pc3 = 95 0 0 1”(齐次)根据主观习惯,相机在世界坐标系的位姿应

事发过程与问题:使用VS建过C#的工程,再打开C++工程,新建一个项目,空工程,找不到配置属性页(可能也经历过一些自动关键和断电之类的异常情形,但不确定是导致bug的原因)。使用包括win32控制台程序等多种方式,都不存在C/C++页,而同解决方案的其他旧工程正常。解决方式:随便编译一次新加工程,页签恢复对此只能解释为bug后续:在此之后,重启VS,新建项目,现象没缓解,暂时需要编译每...
简介im2col就是img to colomn主,要是把图像转成column,原因和用途也很清晰,CNN中数据是四维的,并且有滑动窗口的存在,如果用for循环,计算效率不敢看。那么原理也很简单,展开、复制、向量化。但是从示意图到实现,还是有一个地方比较绕,所以我一下也没想到实现,还是看着参考代码分析了一下才明白。示意图:其实示意图可以写两种,不带batch的,...
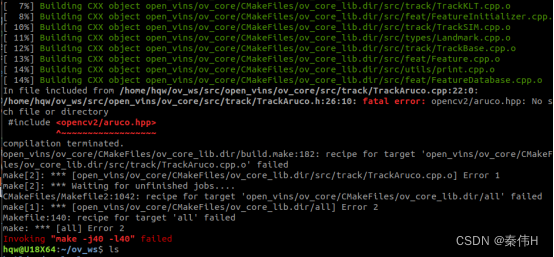
看到openvins引用新编译的opencv库,新的是3.2.0,默认是3.4.8,虽然我没替换3.4.8,制定了/usr/local/opencv320/,但是执行了make install。这种问题很简单了,直接打开cmake/OpenCVCompilerOptions.cmake:21 ,找到21行,他就是多了一行多余的endif,直接删除掉就好了。将头文件cuda_fp16.h添加至 op
vanila SGD先不写了,很简单,主要从Momentum开始。老规矩,先手写,再对照书本:其实这个还真难手写出一样的,尤其v的初始化,我就没想到他怎么做。他默认了很多规则在里边,他的v没在init初始化,也不能动态,二是在第一次update时定型。其他方面,有些地方k、v对,其实用k或者v都能达到效果,就不赘述class Momentum():def __...