




- @hongke_weixin
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
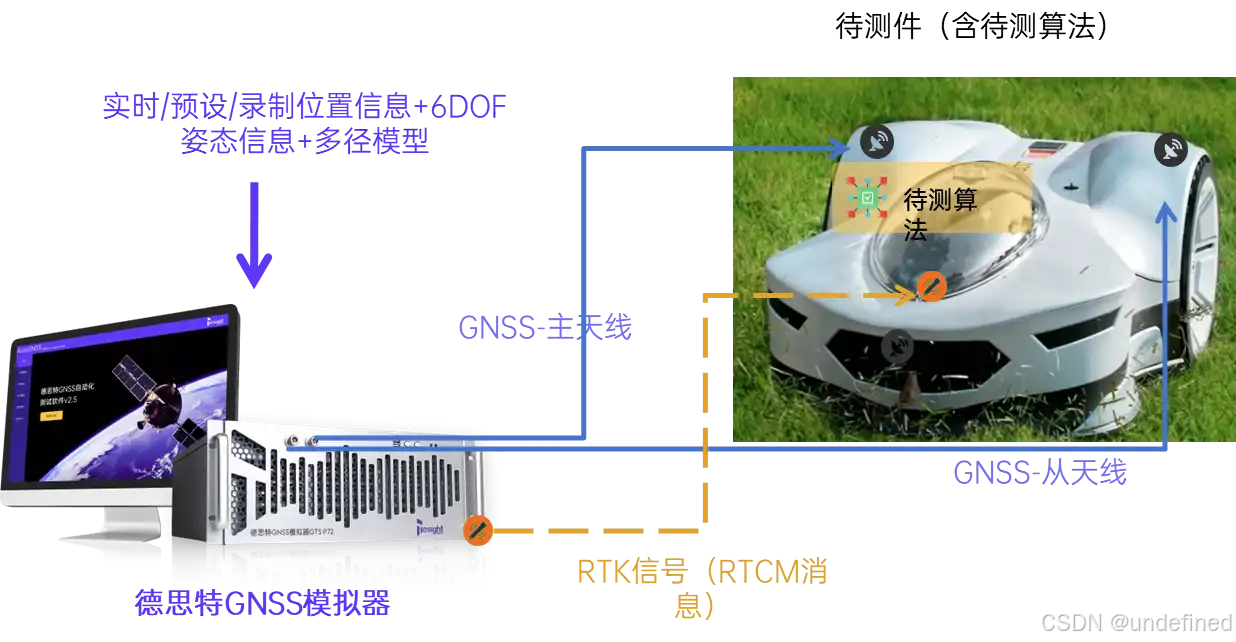
摘要: 随着户外机器人(如割草机、巡检和配送机器人)的普及,高精度RTK定位和双天线定向技术成为其自主运行的核心。然而,传统实地测试受限于环境不可控、周期长、成本高,导致研发效率低下。本文提出基于德思特GNSS模拟器的室内仿真测试方案,通过多实例仿真同步模拟双天线信号,结合虚拟基站生成RTCM差分数据,复现全球任意场景(包括多径干扰),实现厘米级定位与航向测试。该方案支持割草机器人等设备在研发早期
近日,虹科\x26amp;德思特CEO陈秋苑女士带队探访全球农业机器人标杆企业极飞科技,围绕农业无人机导航定位、RTK技术应用以及复杂环境下的稳定性挑战展开深入交流,分享德思特GNSS模拟器如何通过实验室标准化验证,帮助农业机器人提前应对真实农田中的极端导航问题!

需具备覆盖至毫米波(44GHz 及以上)的能力,并拥有微秒级的切换速度,以应对 5G/6G 全频段扫频及雷达频率敏捷性测试。具备极低的相位噪声以适配量子计算操控,同时拥有大功率、高精度的幅度输出,确保射频器件测试结果的真实性与重复性。提供从标准台式、板卡模块化到超便携紧凑型的多样化选择,配合开放的 API 接口,实现从实验室研发到工业产线 ATE 环境的无缝衔接。由此可见,在这些关键能力上,德思特

本文从全球时间参考体系出发,解析UT1、TAI与UTC的演进逻辑,阐明GNSS测距中纳秒级时间精度对定位的关键影响。系统梳理GPS、北斗、GLONASS、Galileo四大系统时定义、周翻转规律及转换方法,并展望量子钟与取消闰秒对下一代导航时间体系的深远变革。
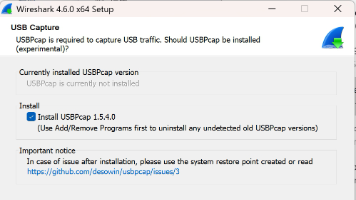
Wireshark 是一款开源免费的网络协议分析工具,支持跨 Windows、macOS、Linux 等多操作系统,核心功能是实时捕获网络中的数据包,并以可视化界面展示数据传输细节。它不仅能分析以太网、Wi-Fi 等传统网络数据,还可通过扩展组件支持 USB、串口等总线数据抓取。
Wireshark 是一款开源免费的网络协议分析工具,支持跨 Windows、macOS、Linux 等多操作系统,核心功能是实时捕获网络中的数据包,并以可视化界面展示数据传输细节。它不仅能分析以太网、Wi-Fi 等传统网络数据,还可通过扩展组件支持 USB、串口等总线数据抓取。
凯泽斯劳滕理工大学通过引入先进的德思特任意波形发生器(AWG)新DDS固件选件,显著加速了量子计算机的开发进程。德思特带您了解AWG全新DDS固件如何提升量子计算机的开发效率。
DDS信号源助力量子研究,通过直接生成多载波信号精确控制AOM/AOD,实现对激光束的精细调控,包括数量、位置和强度,对原子操控及量子计算等领域具有深远影响。
联发科与英特尔发布的Wi-Fi 8白皮书,为下一代无线网络的“确定性体验”转型提供了系统框架。德思特为您带来全面深度解读,从标准演进、多AP协同、链路可靠性增强到AI原生融合,逐层拆解Wi-Fi 8的关键使能技术。

联发科与英特尔发布的Wi-Fi 8白皮书,为下一代无线网络的“确定性体验”转型提供了系统框架。德思特为您带来全面深度解读,从标准演进、多AP协同、链路可靠性增强到AI原生融合,逐层拆解Wi-Fi 8的关键使能技术。