- @hai411741962
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
【代码】pyttsx3离线转换文本为语音(python)

【代码】pyttsx3离线转换文本为语音(python)
视图面板还允许您创建不同的命名视图,这些视图会被保存并可在其中切换。视图由目标框架、相机类型和相机姿势组成。您可以通过单击视图面板的“保存”按钮来保存视图。
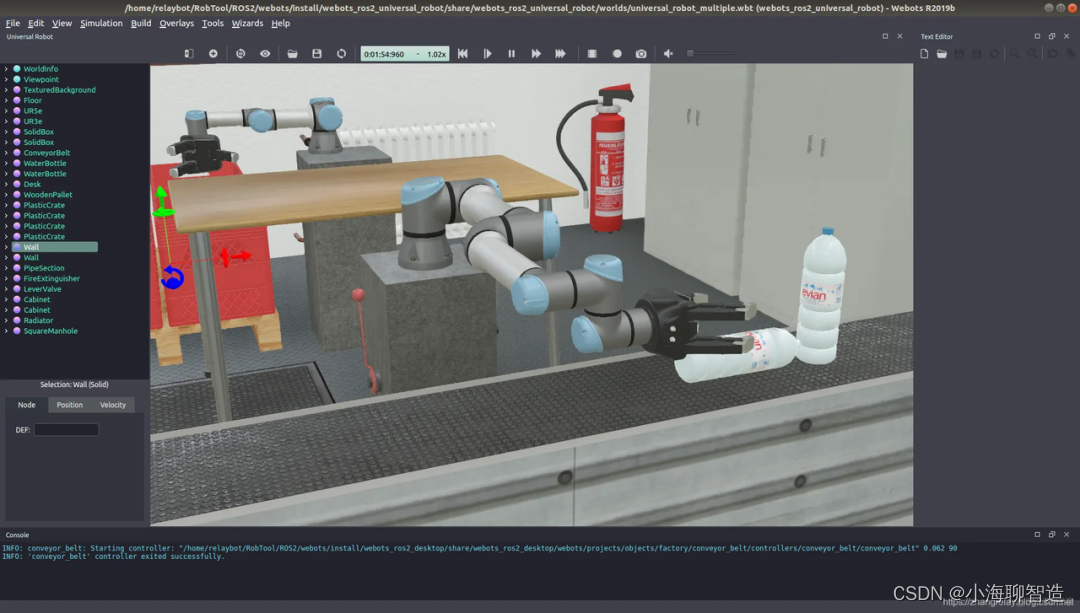
特殊地,对于足式机器人仿真而言,其结构为多自由度的开链或闭链结构,导致其动力学模型比一般的轮式机器人更为复杂,并且机器人运动过程中需要与环境实时进行多点接触,这对仿真器在多物体碰撞检测方面的性能要求就会很高。对于一些工业机械臂而言,其价格达到几十万甚至更高,这对于一些机器人爱好者或者初学者是无法承受的,而仿真可以提供一个廉价的学习环境,使用者可以在仿真环境中轻松搭建自己的机器人硬件,来实现和测试自
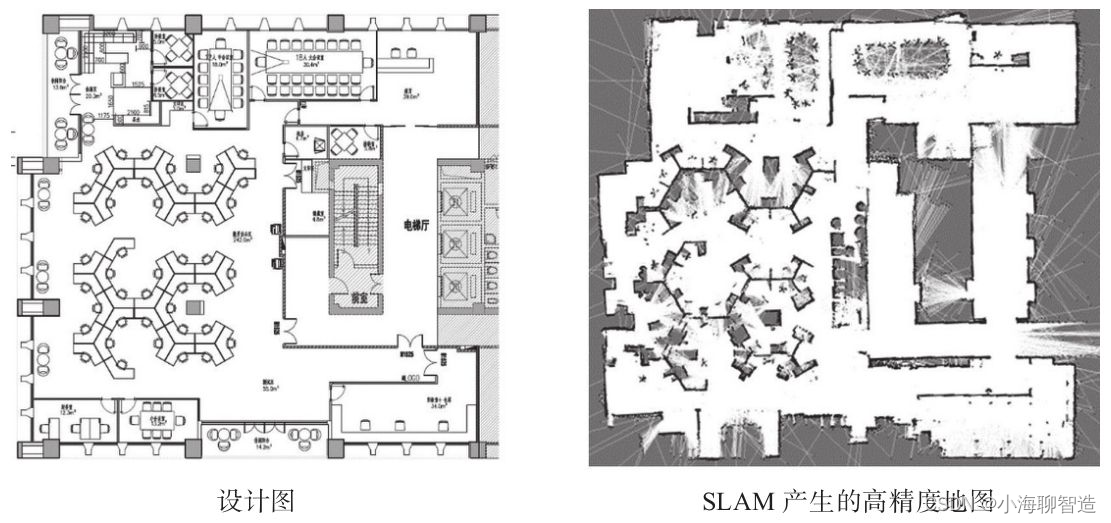
机器人技术的迅猛发展,促使机器人逐渐走进了人们的生活,服务型室内移动机器人更是获得了广泛的关注。但室内机器人的普及还存在许多亟待解决的问题,定位与导航就是其中的关键问题之一。在这类问题的研究中,需要把握三个重点:一是地图精确建模;二是机器人准确定位;三是路径实时规划。在近几十年的研究中,对以上三个重点提出了多种有效的解决方法。室外定位与导航可以使用GPS,但在室内这个问题就变得比较复杂。为了实现室
小技巧:输入命令的时候可按 Tab 建将命令自动补全,将消息类型补全后可双击 Tab 建将消息补全。###4.1rosnode info /xxx#查看xxx节点信息。我们先看下 list 列出所有当前在用的消息列表,可以看到,只有两个。打开新的命令窗口,启动turtle_teleop_key 节点。同样的先看下 rosservice 下所有的命令列表。列出rostopic 所有的命令列表,如下图
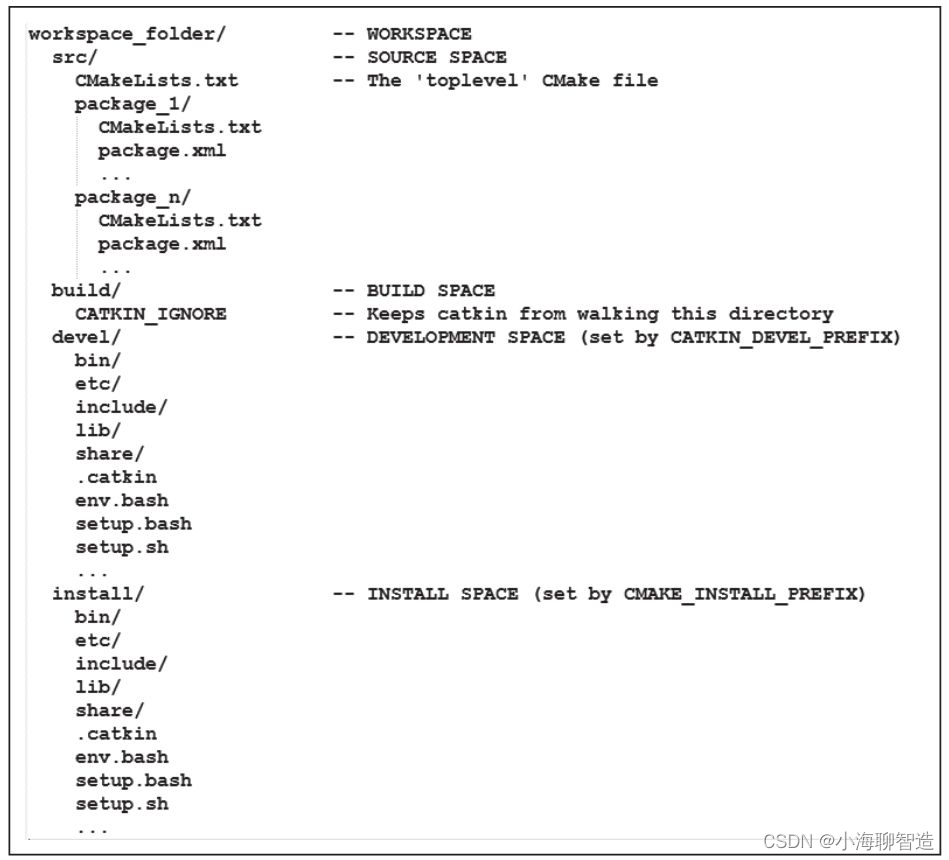
ROS工作空间(workspace)是一个存放工程开发相关文件的文件夹。