




- @geniusChinaHN
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
--------------------看不到。----------------看不到。
在ros路径规划时候出现cannot marshal none unless allow_none is enabled。发现*/move_base/TrajectoryPlannerROS:none就知道是这个值是none。并且有load_parameters:unable to set parameters。本来后面那个文档全部都是他的值,为什么会变成none呢?}就是说后面加个括号把以前的内
ros2开发环境是linux,但是我们用的系统一般是Windows,我一看到这里,一开始的反应就是安装了一个Linux,但是很高兴,现在不用这么干了,那简直太不翻遍了。有2个大师告诉我:如果对于运行速度不要求,
编译完成后,在 "Project Explorer" 中可找到生成的可执行程序(文件后缀名为 ".elf")。在工程中双击打开 ".ioc" 文件,选择 "Project Manager" 选项卡,在 "Chip & Board" 中设置正确的芯片型号。在 "Project Explorer" 中选择 "Run As" 进行烧录,或在 "Debug Configurations" 中配置需要的参数
备注:客服发给我的指令集是错的。
1这个项目因为时间是5年前更新的了,所以在安装的时候一些依赖已经找不到了,所以不考虑。2 这是一个2年内更新的 项目,应该比较可靠。
9《线性代数》----这个可能需要看一下,因为电路分析需要解开线性方程组--好像我这个初级水平使用网孔分析好像就不用学了。7《ros2》----这个得看ROS2官网全英文的教程----词汇水平不要求太高3000词汇应该差不多看得懂。13《树莓派开发》----一开始学用的树莓派,如果日后要做产品,那就更加用到电路设计。3《高等数学》-----没有这个无法计算动态电路。4《电路分析》-----没有这个

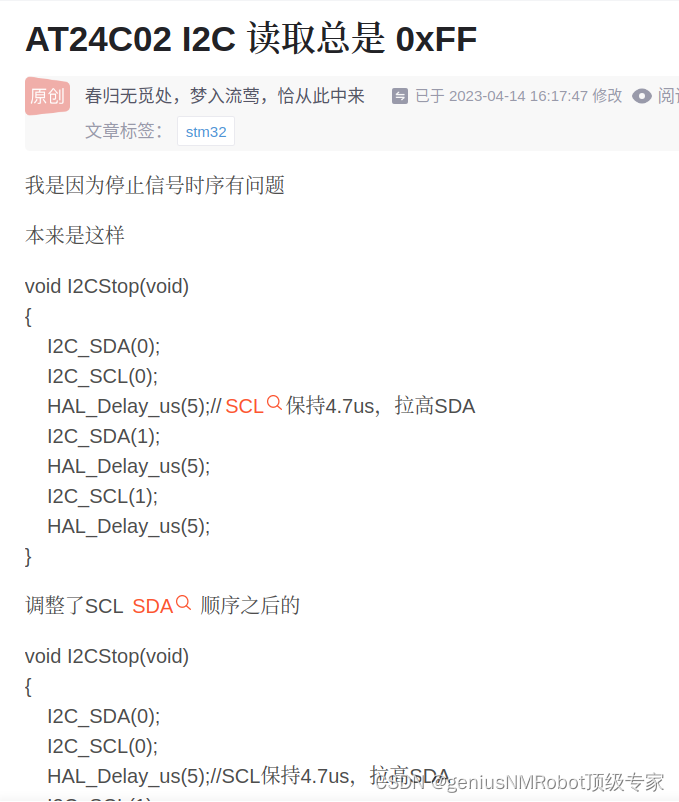
因为我的I2C库函数已经做了几个实验了,都很正常,所以我很有自信就没检查I2C的代码,但是在这么一个不起眼的代码却产生了这样看不见的错误。时序错误你怎能检查出来?但是我好在已经锁定了问题出在软件上,因为硬件的引脚已经可以看到都连接很好了,即使是虚焊也可以通电没问题。我输入的数据根据ACK判断无异常,读取的数据根据ACK判断也无异常。真的是天助我也,我的这个函数果然是错了。
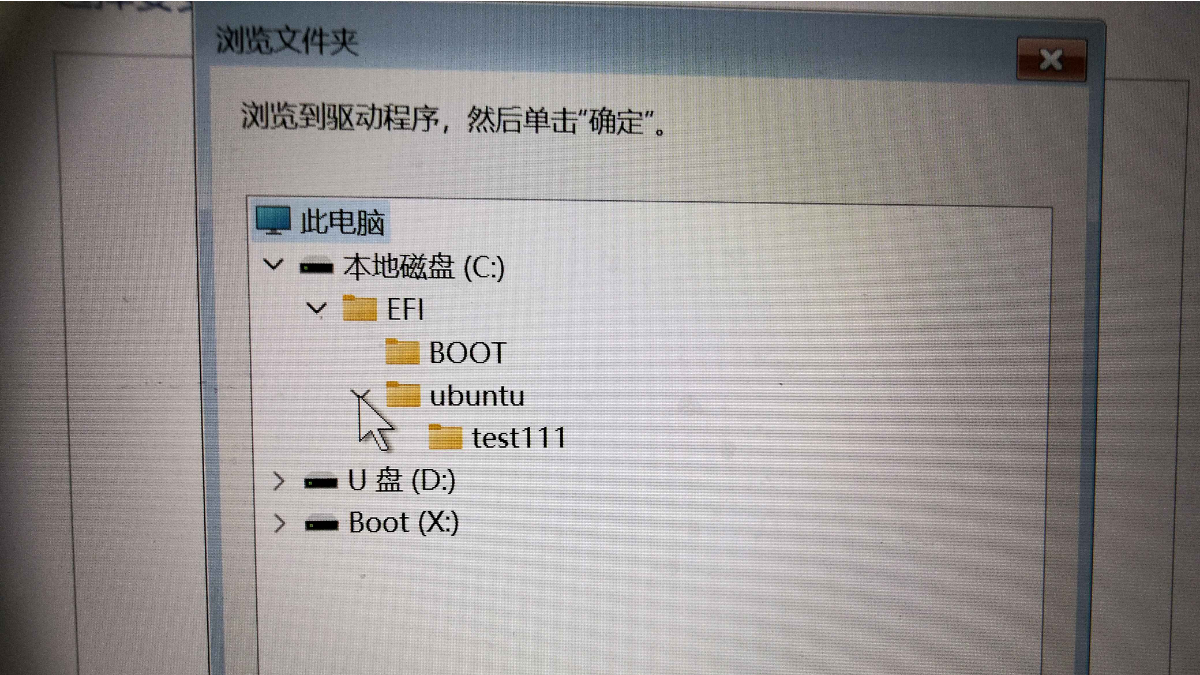
有一些第三方工具可以帮助您将MBR分区表转换为GPT分区表,例如AOMEI Partition Assistant、MiniTool Partition Wizard等。如果您的计算机上有MBR分区表,您需要将其转换为GPT分区表才能安装Windows 11。在“选择要安装的位置”页面上,选择要安装Windows 10的磁盘。单击“驱动器选项(高级)”,然后选择“转换为GPT”选项。打开工具,选择
因为国内ros2的书,只有2本,这个算其中一本,印刷还是不错的,但是我要说一说我一直想说却没有说出来的一件事情:这个书写的太垃圾了,千万不要买。第四:以上的结果就是:浪费了我1个月的时间,而且没搞懂是怎么一回事。后来发现原来我早就具备自己开发的能力,只是一直不知道,就因为那个白痴没说。第二:那个人根本就不是在写书,他就是在翻译外国人的话,而且是很没有水平的直接翻译,里面很多没有意义的词语-----