
写文章




- @ediykk
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
智能小车转向原理
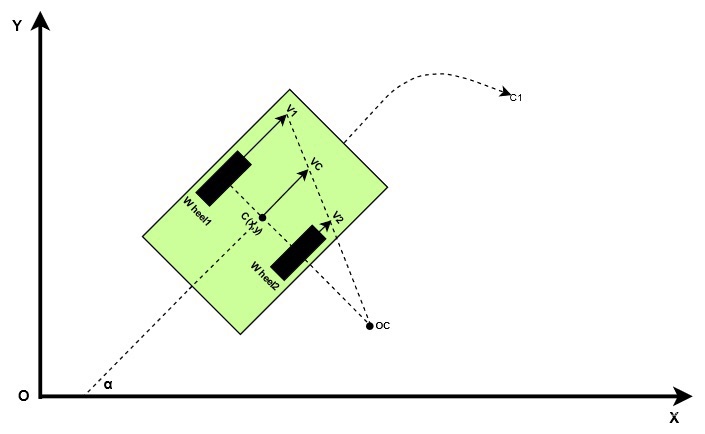
如图所示为小车的为小车简化模型的右转时的原理图,图中C为两侧驱动轮的连线中点, 为转向时的姿态角,V1和V2分别为左右两轮的线速度,Vc为转向时小车的线速度,Oc为小车的转动中心。从图中可以得知小车左侧的车轮的速度V1要比右侧车轮的速度V2大,若维持此速度不变,小车将从位置C移动到位置C1。而实现此现象的原因是:汽车在转弯行驶时,两侧车轮在同一时间内驶过的路程不等,外侧车轮行驶过的路程较内侧车轮长
智能小车转向原理
如图所示为小车的为小车简化模型的右转时的原理图,图中C为两侧驱动轮的连线中点, 为转向时的姿态角,V1和V2分别为左右两轮的线速度,Vc为转向时小车的线速度,Oc为小车的转动中心。从图中可以得知小车左侧的车轮的速度V1要比右侧车轮的速度V2大,若维持此速度不变,小车将从位置C移动到位置C1。而实现此现象的原因是:汽车在转弯行驶时,两侧车轮在同一时间内驶过的路程不等,外侧车轮行驶过的路程较内侧车轮长
STM32单片机超声波测距(避障)
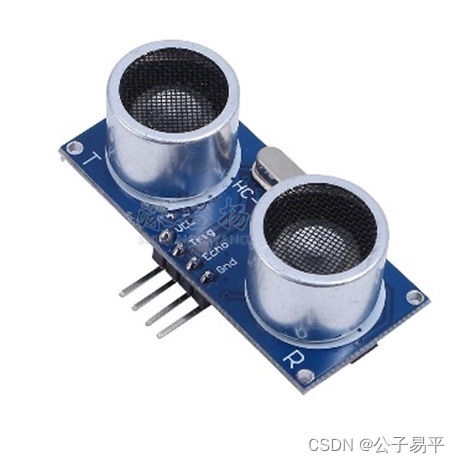
2.1 超声波传感器引脚和参数介绍(PA0–>TrigPA1–>Echo)2.2 超声波测距实现原理首先看原理图:如图所示,超声波工作的过程实际就是不断循环主控(STM32)发送Trig信号、超声波模块发送驱动信号以及主控接收Echo信号并测距则三个过程。
STM32单片机PWM控制实现电机调速度(小车运动,STM32F103C8T6&TB6612&TT电机)
使用STM32单片机和TB6612硬件,采用PWM控制的方法实现电机的调速控制,或者实现小车的运动控制。

到底了