




- @download1997
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
通义实验室推出的Wan2.1/2.2视频生成模型套件,通过创新的3D因果变分自编码器(Wan-VAE)和高效架构设计,实现了开源视频生成技术的突破。该模型采用时空解耦的压缩策略(最高1024倍压缩率)、特征缓存机制(O(1)显存占用)以及Flow Matching训练框架,支持文生视频、图生视频等8大任务。其核心创新包括:分块处理的因果3D卷积、共享时间步调制的视频DiT架构、以及中英文兼容的um
阿里巴巴通义实验室开源了Wan2.2视频生成框架,基于PyTorch实现,采用Apache 2.0协议。项目提供四大核心功能:文本生成视频(WanT2V)、图像生成视频(WanI2V)、图文生成视频(WanTI2V)和语音生成视频(WanS2V)。核心创新包括:1) 采用MoE架构的DiT模型,包含高/低噪声双专家;2) 升级VAE实现1024倍压缩率;3) 支持分布式推理(FSDP+Ulysse
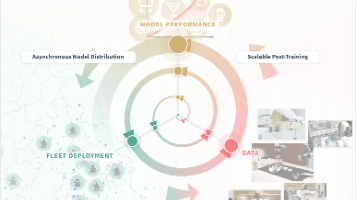
本文提出了一种名为"Learning while Deploying"(LWD)的机器人集群强化学习框架,通过16台双臂机器人的真实部署实现了视觉-语言-动作策略的持续在线进化。该系统包含分布式隐式价值学习(DIVL)和基于伴随匹配的策略提取(QAM)两个关键算法,构建了从部署到学习的闭环数据飞轮。实验表明,LWD在8个真实世界任务中平均成功率高达95%,尤其在长周期任务上表现突出。该研究突破了传
《Qwen-VLA:统一视觉-语言-动作的具身智能模型》 摘要:通义实验室提出的Qwen-VLA模型创新性地将操作、导航和轨迹预测等异构任务统一到单一框架下,通过四阶段训练流程实现了跨11种机器人平台的通用控制。该模型采用双模块架构,其中Qwen3.5-4B作为视觉语言主干网络,1.15B参数的DiT动作解码器基于Flow-Matching技术生成平滑动作轨迹。核心创新包括:1)本体感知提示条件化
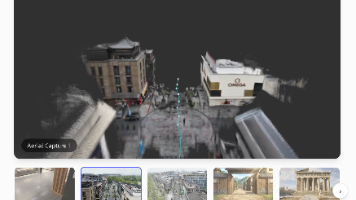
流式3D重建新突破:蚂蚁集团提出几何上下文注意力机制实现长序列实时推理 蚂蚁集团灵波科技团队最新提出的LingBot-Map模型创新性地将传统SLAM的三层空间记忆机制转化为端到端可学习的几何上下文注意力(GCA),解决了流式3D重建中的长序列处理难题。该模型通过仅保留6个摘要token的极致压缩策略,实现73倍的token压缩率,支持万帧级长序列实时推理。关键技术包括:解耦旋转和平移的cam2w
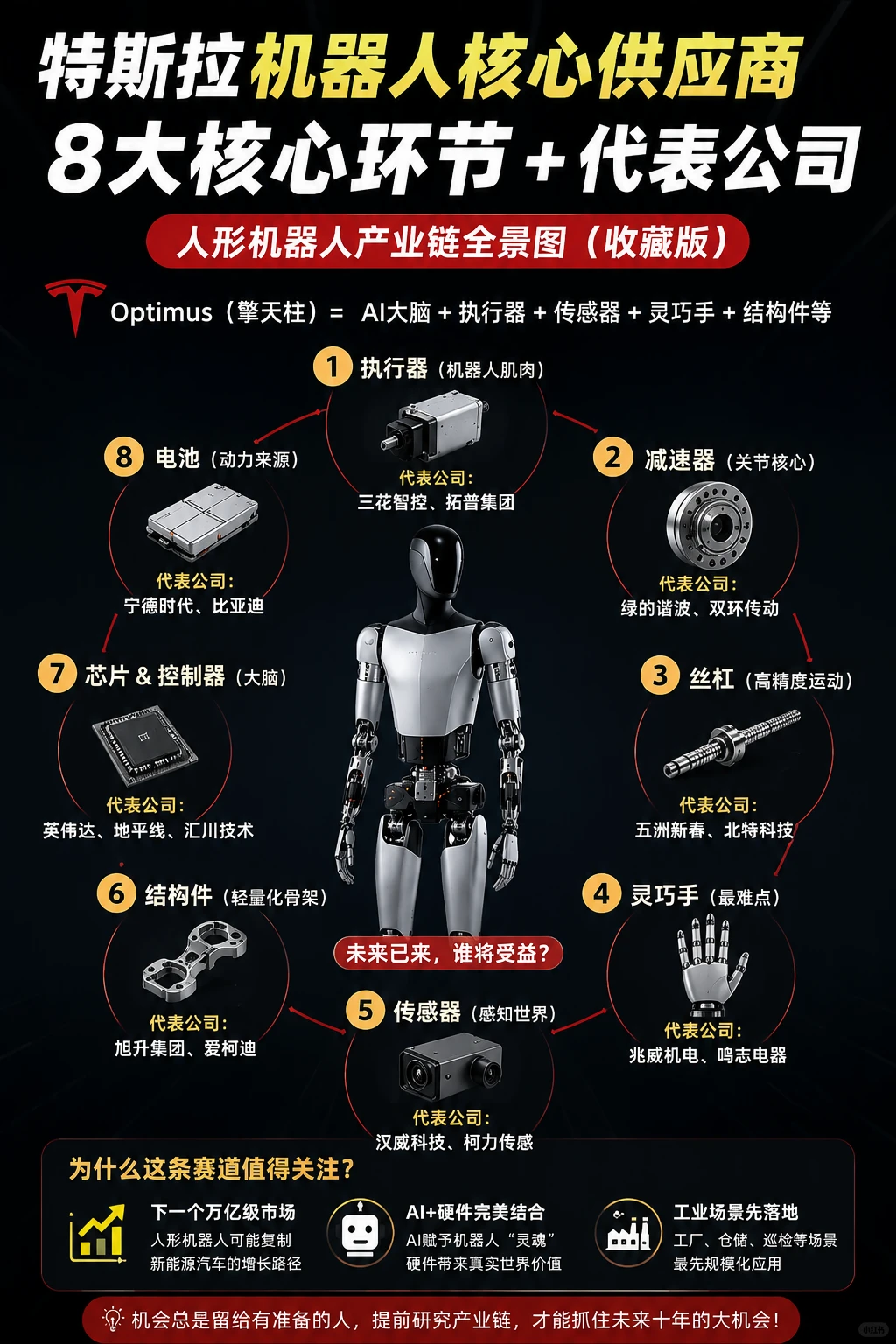
国产人形机器人核心零部件突破路径分析 人形机器人核心零部件国产化面临严峻挑战,当前国产化率普遍低于70%,高端编码器、行星滚柱丝杠等关键部件仍依赖进口。报告深度剖析8大核心部件技术壁垒与突破路径: 技术瓶颈 行星滚柱丝杠内螺纹磨削精度不足(30%国产化率),谐波减速器柔轮寿命仅为进口60%,高端编码器23bit以上光刻技术受制,六维力传感器微型化(<50g)亟待突破,柔性触觉传感器量产一致性
蚂蚁集团灵波科技发布LingBot-VLA具身智能基础模型,通过20,000小时真实机器人操作数据和MoE架构实现跨平台泛化能力。该模型采用VLM骨干+动作扩散头的架构,创新性地引入Query-based深度蒸馏技术,在保持零推理开销的同时增强空间感知能力。实验显示,模型在GM-100基准测试中成功率比基线提升33%,且性能随数据量增长呈现持续提升趋势。研究首次验证了VLA领域的real-worl
蚂蚁集团灵波科技发布LingBot-VLA具身智能基础模型,通过20,000小时真实机器人操作数据和MoE架构实现跨平台泛化能力。该模型采用VLM骨干+动作扩散头的架构,创新性地引入Query-based深度蒸馏技术,在保持零推理开销的同时增强空间感知能力。实验显示,模型在GM-100基准测试中成功率比基线提升33%,且性能随数据量增长呈现持续提升趋势。研究首次验证了VLA领域的real-worl
国产人形机器人核心零部件突破路径分析 人形机器人核心零部件国产化面临严峻挑战,当前国产化率普遍低于70%,高端编码器、行星滚柱丝杠等关键部件仍依赖进口。报告深度剖析8大核心部件技术壁垒与突破路径: 技术瓶颈 行星滚柱丝杠内螺纹磨削精度不足(30%国产化率),谐波减速器柔轮寿命仅为进口60%,高端编码器23bit以上光刻技术受制,六维力传感器微型化(<50g)亟待突破,柔性触觉传感器量产一致性
预测动作后果:如果执行这个动作,场景将如何变化?生成可执行动作:机器人应该做什么?纯策略模型(如 π0.5):看到场景就输出动作,是"条件反射"——在面对长程、接触丰富的精细操作时容易一步错步步错纯世界模型:能预测未来但无法生成动作,且训练数据与机器人控制空间不对齐关键矛盾:大规模视频数据有丰富的物体交互动态但无动作标签;真机数据有动作标签但覆盖范围有限。
