




- @cs1395293598
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
比如输入是2副图像,第一副图像有0,1,2共三个channel,第二幅图像只有0一个channel,那么输入就一共有4个channes,如果int channels[3] = {3, 2, 0},那么就表示是使用第二副图像的第一个通道和第一副图像的第2和第0个通道来计算直方图。images:输入的图像的指针,可以是多幅图像,所有的图像必须有同样的深度(CV_8U or CV_32F)。这个就相当于

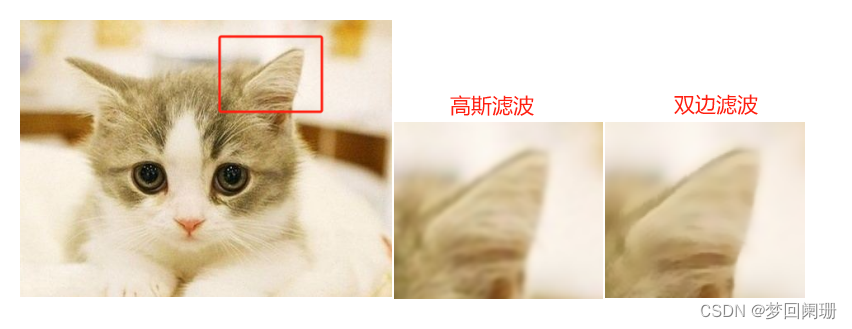
双边滤波的核函数是空间域核与像素范围域核的综合结果:在图像的平坦区域,像素值变化很小,对应的像素范围域权重接近于1,此时空间域权重起主要作用,相当于进行高斯模糊;第五个参数,空间坐标中滤波器的标准差值,这个参数越大表明越远的像素会相互影响,从而使更大领域中有足够相似的颜色获取相同的颜色。双边滤波中加入了对灰度信息的权重,即在邻域内灰度值越接近中心点的灰度值的点权重越大,与中心点灰度值相差大的点权重
如果以光流的方式追踪目标,基本上我们可以通过goodFeaturesToTrack函数计算一系列特征点,然后通过Lucas-Kanade算法进行一系列特征点的预测,并画出这些预测点的运动轨迹。cornerSubPix 的作用就是对这些检测到的角点位置进行进一步的精细化调整,使得角点的位置更加精确。较大的窗口可能需要更多的计算资源,因此在资源受限或需要实时处理的情况下,可能需要权衡窗口大小和计算效率

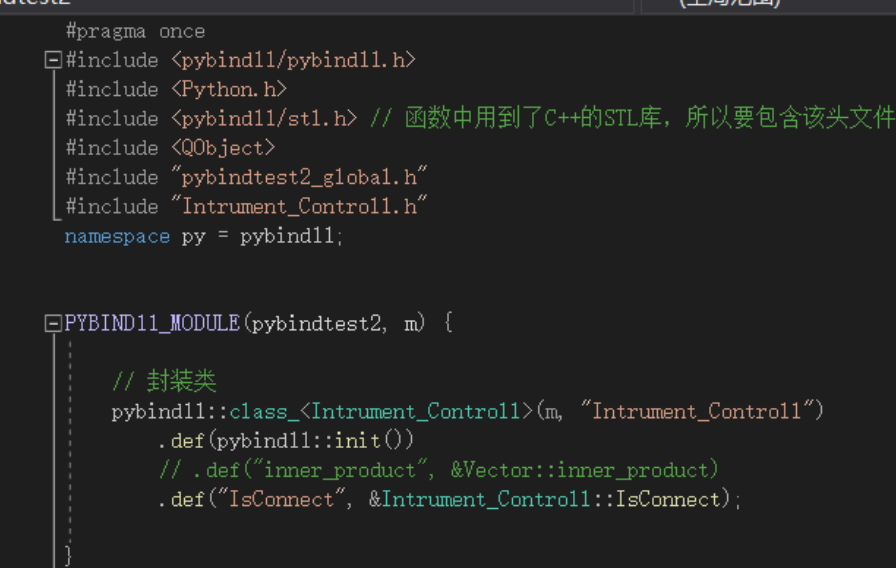
很可能是缺少某些DLL。Pybind11 借鉴了 Boost::Python 库的设计,但使用了更为简洁的实现方式,使用了大量 C++11 的新特性,更易于使用。(1)VS2019创建动态库(我这里是写了一个C++动态库专门存放pybind11的接口),在附加包含目录加入pybind11和python头文件(注意:动态库的cpp文件不要删掉,不然编译无法生产lib文件)使用pybind11需要注意
RGB16从高位到低位的排列为R->G->B,RGB24和RGB32从高位到低位的排列为B->G->R。(00000000 00000000 00000000 空空空空空空空空–11111111 11111111 11111111 空空空空空空空空)32位为一个像素(Vec4b),带alpha通道的RGB24,与RGB32的区别在于保留的8个Bit用于表示透明,也就是alpha值。32位为一个像素

很可能是缺少某些DLL。Pybind11 借鉴了 Boost::Python 库的设计,但使用了更为简洁的实现方式,使用了大量 C++11 的新特性,更易于使用。(1)VS2019创建动态库(我这里是写了一个C++动态库专门存放pybind11的接口),在附加包含目录加入pybind11和python头文件(注意:动态库的cpp文件不要删掉,不然编译无法生产lib文件)使用pybind11需要注意