




- @cimpro
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
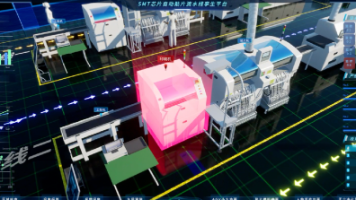
软件将设计创造性、交互逻辑、三维动画、数据接入等多类前沿技术,集成在一个具备强大实时渲染功能的三维环境中。该项目基于CIMPro孪大师开发,用户可基于此模板自由编辑场景、调整UI图表及设置交互标签,快速适配实际业务需求,如设备异常告警、远程人员巡检。还原了全自动贴片线、锡膏印刷机、回流焊炉、AOI检测设备等关键单元,并实时接入设备PLC数据、SPI/AOI检测结果、MES工单信息。:输入产品序列号
对于西安的军工科研院所而言,开发数字孪生系统,没有试错空间,更不能有任何安全风险。它不仅能完美解决信创合规的问题,其零代码/低代码的开发模式,更能让仿真系统的开发效率成倍提升,帮助团队从繁重的底层技术工作中解放出来,专注于业务逻辑和核心算法的研究。在推进国防科技现代化的征程上,CIMPro孪大师愿做那座最坚实的“中国梯”。西安,作为我国重要的国防科技工业基地,聚集了大量的军工科研院所和装备制造企业

在强调数据安全和自主可控的背景下,广州港口建设选择一款国产自研的引擎,不仅是对国家信创战略的积极响应,更是保障未来运营不受制于人的战略性选择。CIMPro孪大师,凭借其强大的平台能力、丰富的行业模板和零代码的开发模式,为广州乃至大湾区的港口数字化转型,提供了一个值得信赖、高效可靠的“中国方案”。作为千年商都和国家重要中心城市,广州坐拥世界级的港口群。数字孪生技术通过在数字世界构建一个与物理港口完全
苏州制造业面临数字孪生技术应用的高成本与长周期难题。CIMPro零代码平台通过拖拽式开发,实现3天自建数字孪生工厂:半天完成模型融合,1.5天场景美化,1天数据对接。该方案使企业节省90%成本,缩短交付周期至数日,并实现系统自主可控。某电子企业案例显示,仅用4天就完成车间数字孪生平台搭建,成本仅为软件年费。这种高效低成本的数字化路径,为苏州制造企业提供了转型新思路。
摘要: 本文对比分析了2026年五大主流数字孪生开发平台(Unreal Engine、Unity、CesiumJS、Three.js/WebGL、CIMPro孪大师),重点针对上海开发者需求,从技术门槛、开发效率、国产化适配等维度进行评估。其中,国产平台CIMPro孪大师凭借零代码开发、多源数据融合、信创合规及高效交付能力脱颖而出,尤其适配上海智慧城市、高端制造等项目场景,并通过智慧校园等案例验证
2026年,“六张网”建设正式拉开大幕。中央明确部署加强水网、新型电网、算力网、新一代通信网、城市地下管网、物流网的规划建设。作为“六张网”的核心网络之一,水网被定位为保障国家水安全的“生命线”,其承载的投资力度尤为显著。然而,传统管理模式存在信息孤岛,亟需智能化平台提升决策效率。在此背景下,智慧水电站数字孪生平台应运而生。某水电站数字孪生运营中心,便是基于CIMPro孪大师国产一站式零代码数字孪

CIMPro在军工领域的态势推演视景仿真实践,加速软件技术适应和掌握新型武器装备和作战模拟的关键功能演变,助力军队优化训练内容和方式,形成数据驱动的训练闭环,正在不断推动军事训练与多域作战决策指挥更加智能化、科学化、高效化。

其域创新是全球唯一打通“全场景3D高斯采集—生成—压缩—编辑—应用部署”完整闭环的空间智能公司,其自研的LCC格式已被NVIDIA Isaac Sim、Esri、Supersplat等国际头部平台正式兼容,技术实力获得行业广泛认可。多格式三维模型兼容:支持BIM模型(Revit、Bentley、SketchUp等)、工业模型(Catia、SolidWorks等)、手工模型(3ds Max、Blen

一台扫描设备,围着设备或车间走一圈,拍几十到两百张照片,就能出活。激光点云,靠激光雷达(LiDAR)发射激光束,测量反射回来的距离,生成密密麻麻的坐标点。传统建模方法只能表达静态“快照”,而高斯泼溅的进阶版——4D高斯泼溅,可以重建动态过程。从任意角度渲染,都能实时生成高质量画面。对工厂项目来说,产线调整频繁,快速建模意味着可以随时更新孪生体,不用等外包团队排期。这意味着你可以用它模拟产线运行、人

具体过程包括自动识别照片间的同名点,进行空中三角测量以精确解算每张照片的空间位置和姿态,进而生成密集点云、构建三角网表面模型,并将原始照片的真实纹理自动映射到三维网格模型上,最终输出带有真实世界纹理的高精度三维实景模型(通常称为 “实景三维模型” 或 “倾斜摄影模型”)。它支持30多种三维模型格式的直通导入(包括Revit、SolidWorks、CATIA、OSGB、BIM、倾斜摄影、点云等),集
