
写文章




- @cg1135217680
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
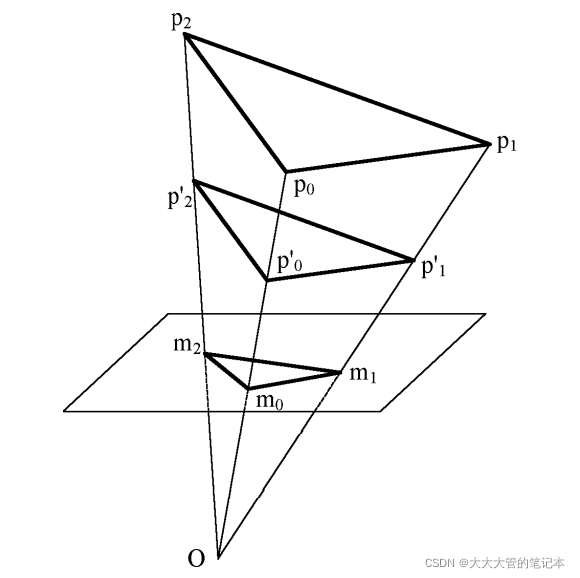
RPnP算法原文及代码解析
(有不对的地方希望得到您的指正~~)RPnP(Robust Perspective-n-Point)是一种快速且具有鲁棒性的PnP求解方法。在2D-3D点较少的情况下,能取得较理想的计算效果。并且其结果远优于EPnP+GN,是目前解决PnP问题的最有效的方法之一。由于RPnP算法是在PST(Perspective Similar Triangle)算法之上,提出来的,故在解析RPnP前,需简单介绍
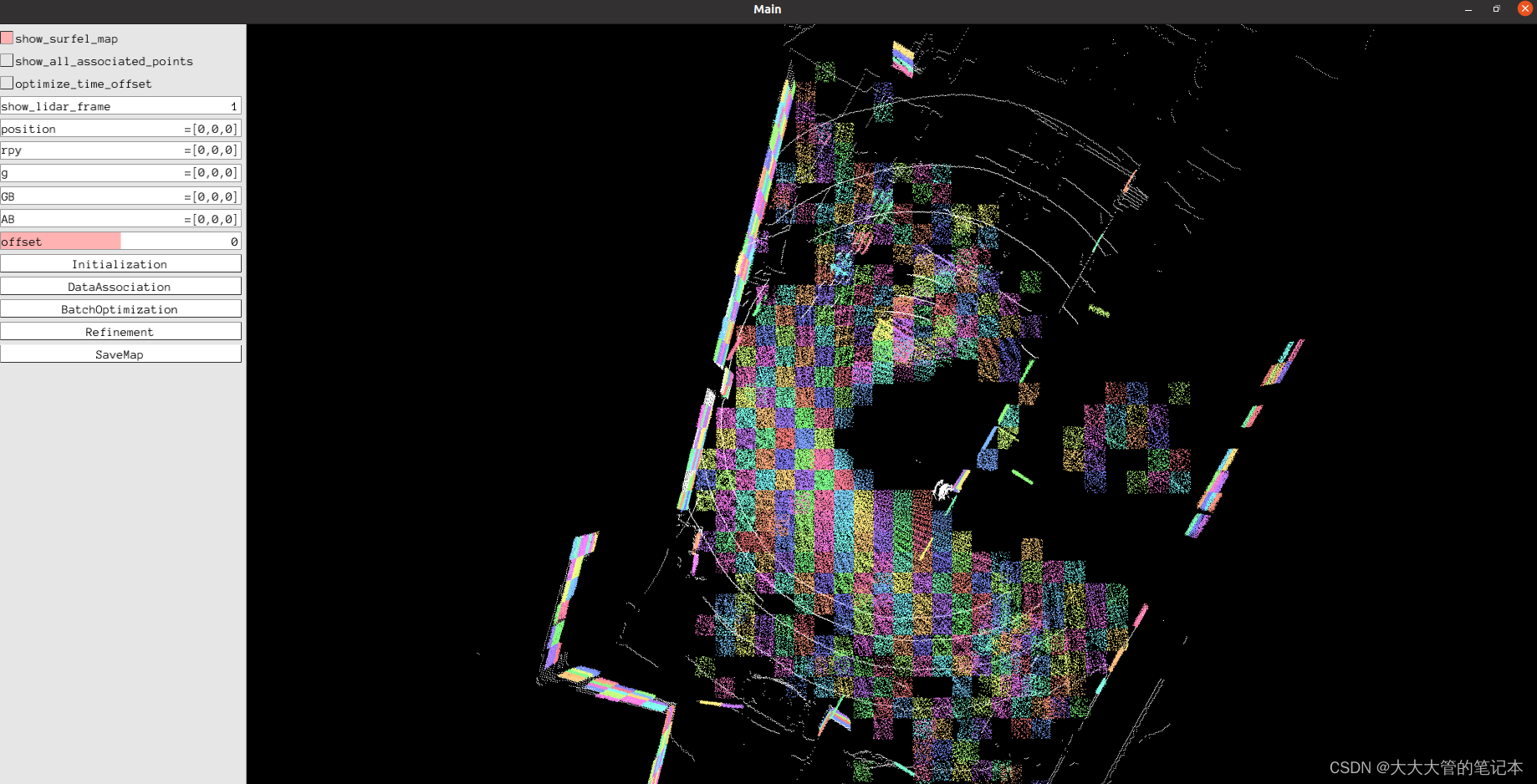
激光雷达和IMU联合标定
本文内容为激光雷达与IMU的外参标定方法,使用的是浙江大学发布的lidar_IMU_calib
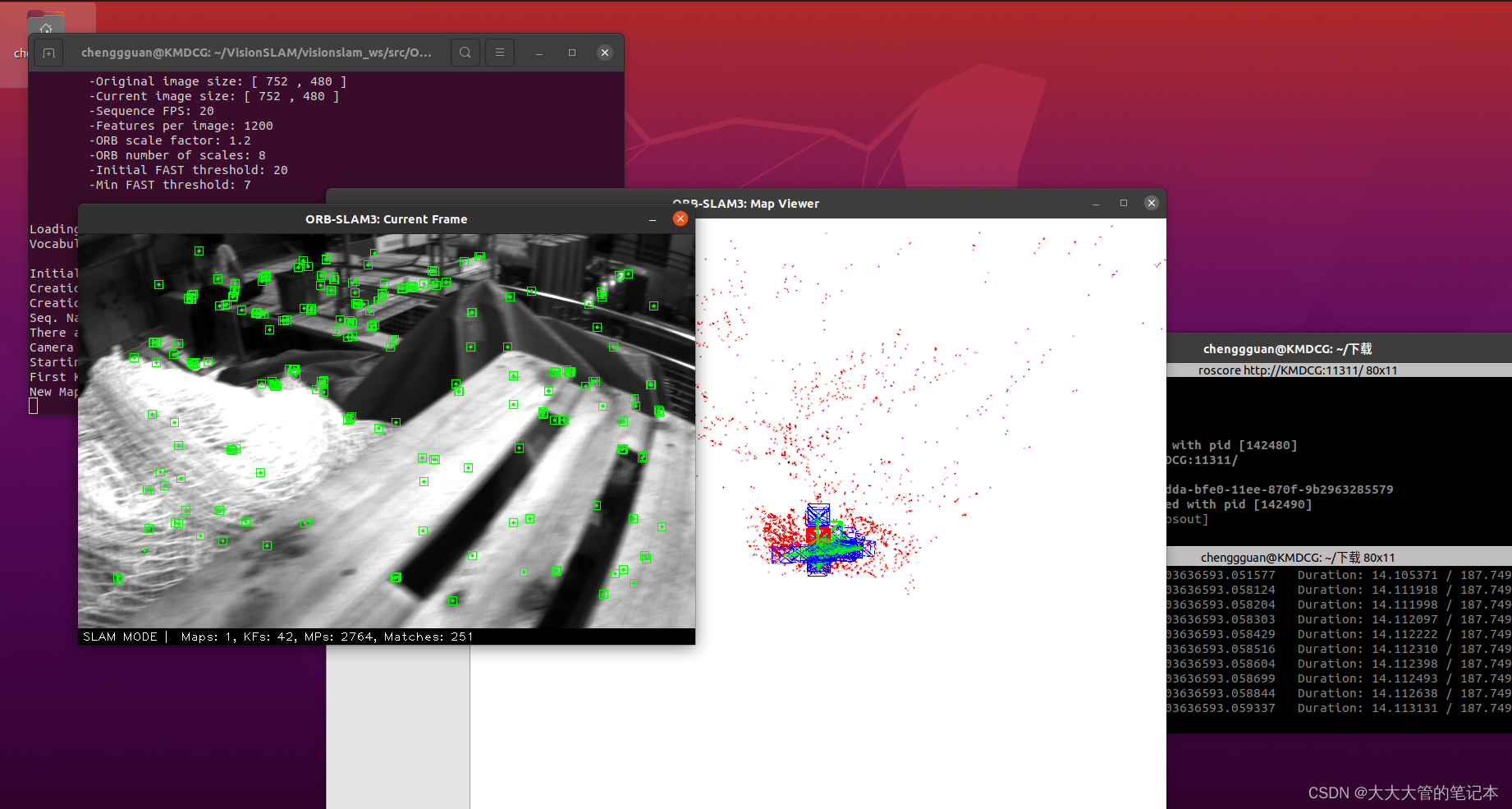
Ubuntu20.04在ROS下运行ORB-SLAM3
小白配置ORB-SLAM3
到底了