




- @ai_moe
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
必须是元组列表。[(lo, hi), (lo, hi), …, (lo, hi)] 定义你想追踪的颜色范围。对于灰度图像,每个元组需要包含两个值 - 最小灰度值和最大灰度值。仅考虑落在这些阈值之间的像素区域。对于 RGB565 图像,每个元组需要有六个值(l_lo,l_hi,a_lo,a_hi,b_lo,b_hi) - 分别是 LAB L,A 和 B通道的最小值和最大值。

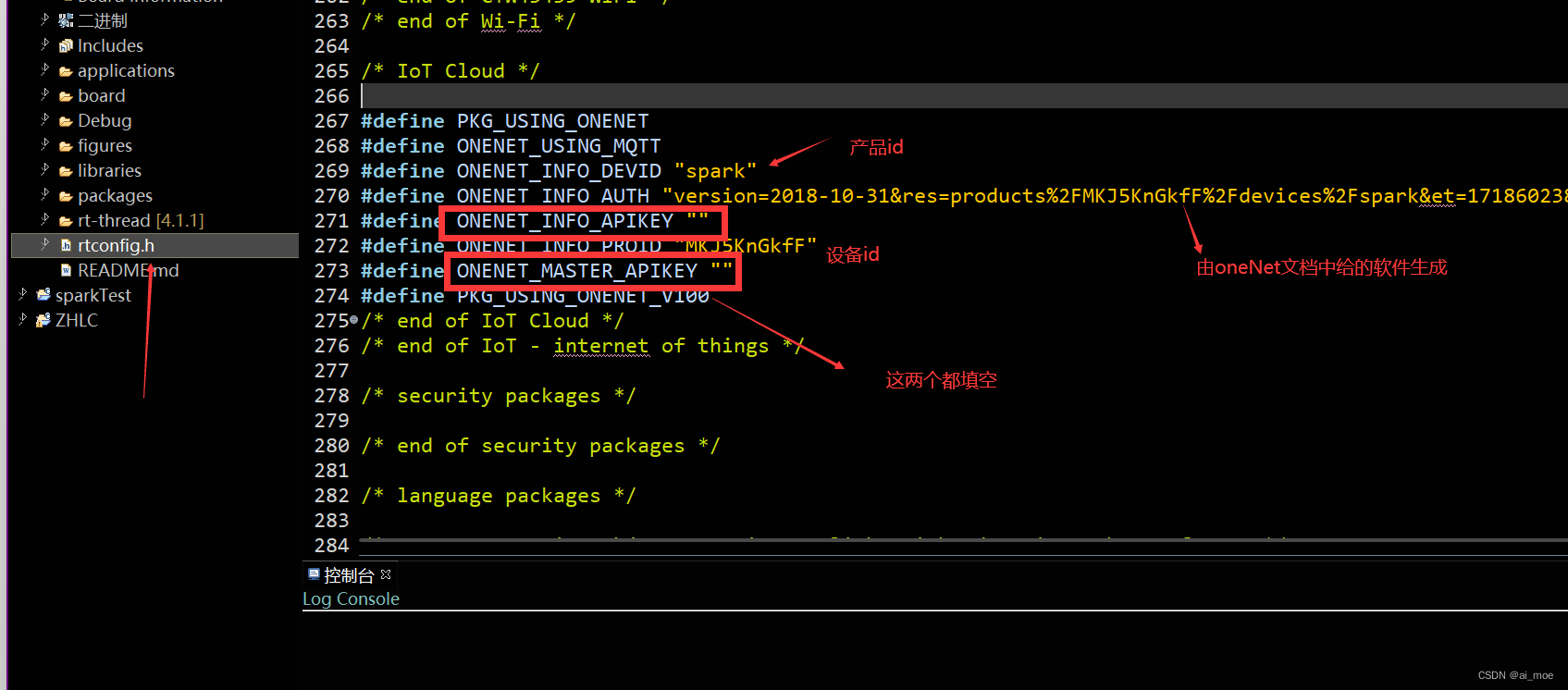
由于rtthread中的OneNet软件包只支持旧版OneNet云,故需要做一些更改来适配新版本OneNet云。
UniVLA的核心创新是使用**潜在动作模型(Latent Action Model)**从视频中提取任务相关的动作表示,而不是直接预测具体的机器人动作。**关键点:潜在动作被映射为特殊token {ACT_0, ACT_1, …这是UniVLA独特的部分,训练一个能从视频中提取"抽象动作"的模型。在特定任务上微调,添加机器人特定的action decoder。训练一个能理解视觉、语言并预测潜在动
MapAnything 是一个简单的端到端训练的 Transformer 模型,能够根据各种输入类型(图像、校准参数、姿态或深度)直接回归场景的分解度量3D几何。多图像SfM(运动恢复结构)多视图立体视觉单目度量深度估计配准深度补全等是 Meta AI 研究院发布的通用3D重建模型,能够从各种输入(图像、相机参数、深度、姿态等)直接重建场景的3D几何结构。# 准备数据集(WAI格式)# 训练模型。
在资料中的程序源码汇总文件夹下找到出厂固件,名称为canmv_yahboom_vx.x.x.bin,其中vx.x.x为版本号。这里以烧录v2.0.5版本固件为例。点击浏览,选择要烧录的固件文件,中间的烧录地址不需要改,默认为0x00000就可以。注意:此步骤会清空K210模块的Flash程序空间,清空后程序空间后,请重新烧录固件才能连接CanMV IDE。在擦除设置中选择模式为全片擦除,选择K21

快速学习蓝桥杯单片机相关知识
