




- @YJOGaHABk
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
当年接手这个项目时,客户甩过来一句"别用解码芯片",差点让我把开发板摔了。本人在xilinx(赛灵思)A7,K7,V7,zynq7,ultrascale以及ultrascale+ 系列的FPGA上已经验证通过,相关项目已经交付。本人在xilinx(赛灵思)A7,K7,V7,zynq7,ultrascale以及ultrascale+ 系列的FPGA上已经验证通过,相关项目已经交付。这个滑动窗口检测器

作为HDMI转MIPI赛道的老选手,它同时支持CSI和DSI两种协议的特性确实挺有意思——特别是当你需要把游戏机的4K画面怼进工业摄像头模组的时候(别问为什么有这个需求)。完整工程文件里最值钱的是那个PCB的EMC设计指南,里面详细标注了哪些位置需要埋磁珠,哪个区域的铺铜要开窗。这种设计让带宽直接翻倍,实测跑4K60的HDR视频流时,示波器抓到的眼图依然干净得能当镜子照。这几个寄存器配置直接决定了
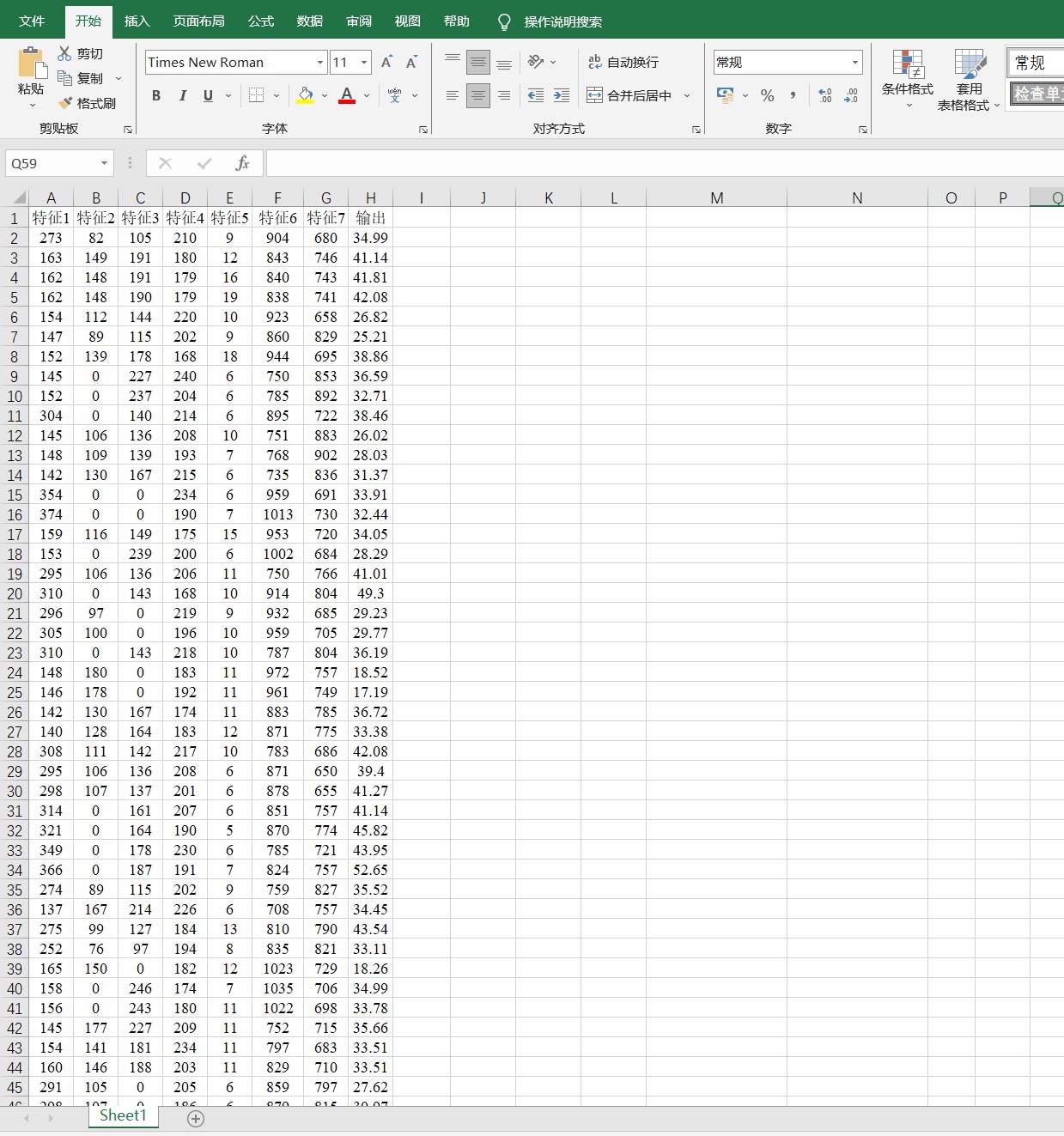
先说重点——这玩意儿用多目标鹈鹕算法同时优化ELM的预测误差和稳定性,比单目标优化更能打。最后提醒下:虽然代码开箱即用,但换数据时预测效果可能会飘,这是机器学习模型的通病,建议多跑几次取最优解。多变量单输出回归,回归预测也可以加好友换成分类或时间序列单列预测(售前选一种),帕累托图如图1所示,回归效果如图2所示~多变量单输出回归,回归预测也可以加好友换成分类或时间序列单列预测(售前选一种),帕累托
双目测距算法的核心思想来源于人类的双眼视觉原理。咱们人类的两只眼睛从不同角度观察同一物体,然后大脑将这两个视角的图像进行融合处理,从而感知出物体的距离。在计算机视觉里,双目测距就是用两个摄像头模拟人类双眼,获取同一物体的两幅图像,再通过分析图像中物体的位置差异(视差)来计算出物体到摄像头的距离。这里有一个简单的公式来计算距离 $Z$:双目测距算法matlab 特征匹配测距其中,$B$ 是两个摄像头

OpenCV提供了方便的保存函数imwriteif (!// 假设已经有处理后的图像这里通过Qt的获取保存路径,然后将其转换为格式,再利用OpenCV的imwrite函数保存图像。
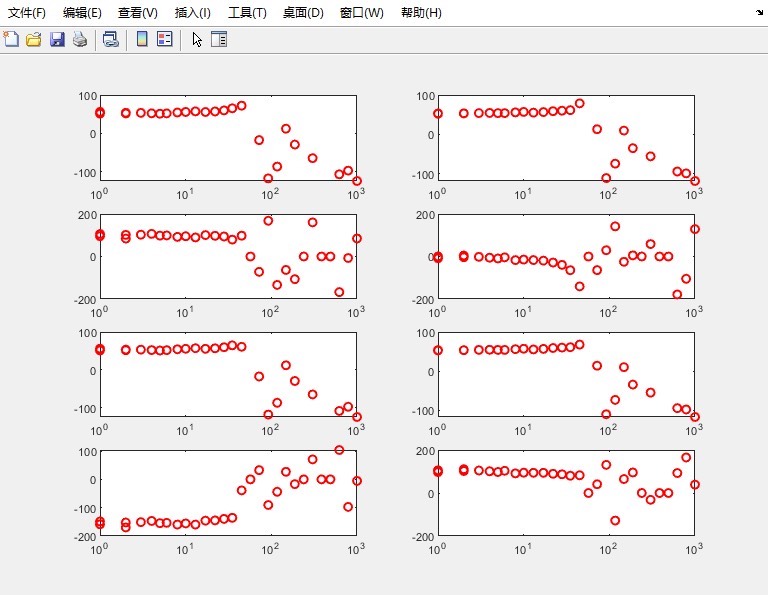
遇到过最诡异的情况是阻抗曲面在1500Hz附近出现凹陷,后来发现是直流电容谐振点,改了个RC吸收电路才摆平。仿真程序为序阻抗扫描所用simulink文件,且序阻抗扫描结果域理论推导结果相差无几。仿真程序为序阻抗扫描所用simulink文件,且序阻抗扫描结果域理论推导结果相差无几。注意:不包含理论推导程序(即该程序包只提供dq域阻抗扫描思路,其正确性有待商榷)注意:不包含理论推导程序(即该程序包只提
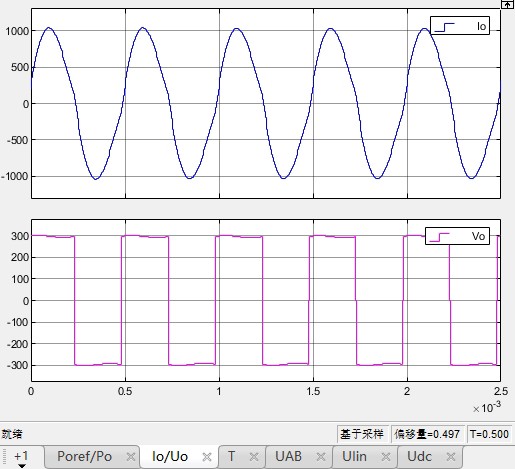
最近在实验室折腾ACDCAC变频移相系统的时候,突然发现Matlab/Simulink真是个好东西。今天就带大家手搓一个双PWM变流器的仿真模型,保准你连示波器都不用擦就能看到移相效果。参数设置这块有个坑:直流母线电压最好设成600V,IGBT开关频率别超过5kHz,否则仿真速度能让你泡面都凉了。有次偷懒用了变步长,结果出来的波形跟抽象画似的,导师看了直摇头。重点来了,移相控制的核心在调制波生成。
边缘梯度模板匹配是一种基于图像边缘信息的模板匹配方法。它的基本思想是利用图像边缘的梯度方向和大小来进行匹配,相比于传统的基于像素灰度值的模板匹配,这种方法对图像的旋转和尺度变化更加鲁棒。通过以上步骤,我们可以实现基于OpenCV的边缘梯度模板匹配。这种方法相比于传统的基于像素灰度值的模板匹配,具有更好的抗旋转和尺度变化能力。当然,这种方法也有它的不足之处,比如计算量较大,对噪声敏感等。在实际应用中

本文档所述代码基于Simulink自动生成,面向永磁同步电机(PMSM)无位置传感器矢量控制(FOC)场景开发,采用龙贝格观测器实现转子位置与转速估算,无需物理位置传感器即可实现高精度电机控制。代码遵循MISRA C:2012规范,针对NXP Cortex-M4内核处理器优化,兼顾ROM效率与运行性能,仿真与实际运行吻合度达95%,支持直接移植至工业级电机控制项目。永磁同步电机无位置传感器控制,采
信捷XD3 PLC驱动的六轴机器人项目,融合了梯形图的直观逻辑控制、C语言的复杂算法实现以及维纶通触摸屏的便捷人机交互,真的是一个非常有挑战性但又充满乐趣的项目。它需要我们对PLC编程、C语言以及人机交互都有深入的理解和掌握。希望我的分享能给正在研究类似项目的小伙伴们一些启发,大家一起交流进步!PLC的六轴机器人,信捷XD3的,有梯形图、有C语言,示较器是维纶通的触摸屏这个比较复杂,需要非常好的基
