




- @YEYUANGEN
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
分布式光纤传感器凭借其成本低、精度高、耐腐蚀、传感距离长等优点在众多领域中都有广泛应用。以布里渊散射原理为理论依据,以嵌入式设备为硬件开发平台,设计并开发了分布式光纤传感器软件系统。相对于传统的光纤传感系统,基于布里渊散射的分布式光纤传感器可监控被测环境的温度、应变信息,而基于嵌入式平台开发的传感系统则具有成本低、性能高、稳定性好等优点。光纤传感系统采用C/S架构,设计重点在于服务器端软件系统的开
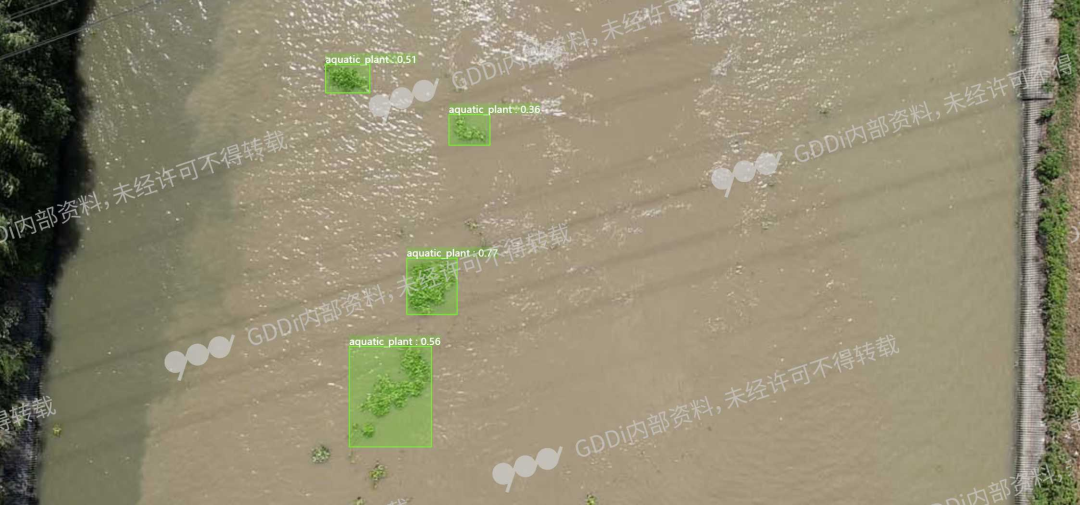
周界传统采用红外对射,误报较高,因此引入区域入侵算法,可去除动物、树叶等其他因素干扰,识别电子围栏或禁止闯入区域内的人员非法闯入异常行为。基于河道漂浮物容易通过水流的影响,被推在河道周围的岸边,因此通过对河道周围的垃圾堆放24h实时识别,目的提高治理河道垃圾的时效性且减少环保工人的工作量。识别河道场景下,水表面是否有漂浮物(生活垃圾、水浮莲植物等),通过算法24h识别,目的提高治理河道垃圾的时效性
支持ethercat伺服品牌有 松下、台达、清能德创、汇川、禾川、新时达等.支持ethercat io模块: 雷赛,新洋等。Ø支持焊接工艺、摆焊接工艺、焊缝相机、码跺工艺、视觉工艺、多条同步带同步跟踪工艺。Ø本产品适用于机器人控制、非标自动化设备控制等需要对电机进行运动控制的装备上面。Ø支持圆弧插补、螺旋线、直线插补、关节插补、在线变位、在线变速度。Ø支持多达64轴控制,可方便实现龙门同步控制,多

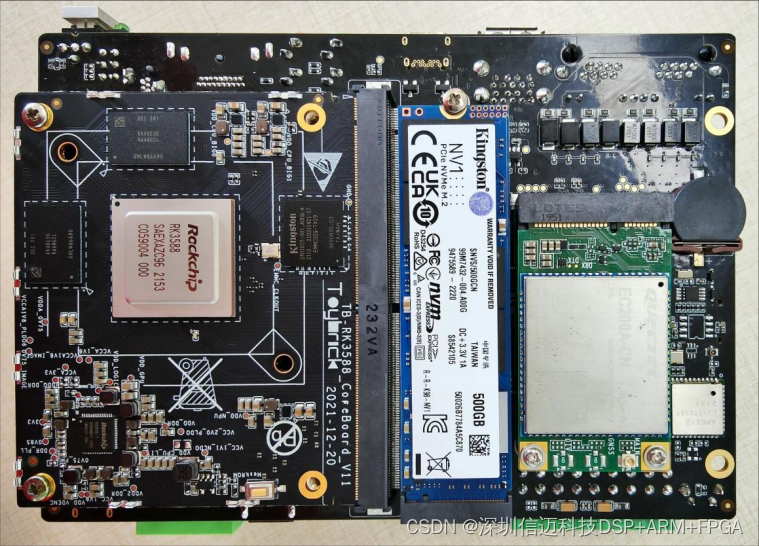
本文详细介绍了基于Rockchip RK3588芯片的AI边缘计算主板外形、尺寸、技术规格,以及详细的硬件接口设计参考说明,使客户可以快速将RK3588边缘计算主板应用于工业互联网、智慧城市、智慧安防、智慧交通,智慧医疗等人工智能领域的智能终端设备。信迈推出基于瑞芯微RK3588架构的AI边缘计算主板,RK3588是新一代国产旗舰高性能64位八核处理器,采用8nm工艺,等扩展接口,能覆盖边缘计算,
机制时,进程(或线程)会获取一个非负整数的信号量,表示共享资源的访问状态。的正确解析,双核系统需要对数据帧进行统一设置。齐方式,方便双核系统进行数据帧的保存和解析。的一种系统调用,其功能是将一个文件或者其他对象映射到进程的地址空间。任务将通信数据打包处理后发送给邮箱,邮箱接收到数据邮件后,根据邮箱状态将邮。本文设计了二进制的核间信号量,并根据双核间任务通信时序,对核间信号量的。固定长度邮箱通信中,

面对国内芯片设计厂家,提供开发板验证业务,测试芯片性能,如某高校的SNN芯片

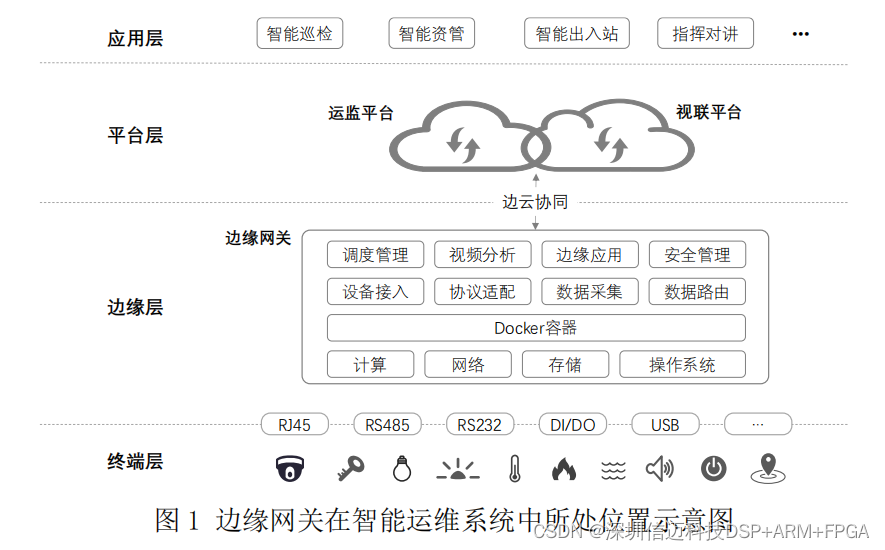
管理模块主要实现对边缘网关的各类软硬件资源、运行维护、接入认证、固件版本等进行管理。边缘网关应支持 HTTP、HTTPS、TCP、UDP、FTP、DNS、DHCP、802.1x、SMTP、UPnP、边缘网关应支持 L2TP、PPTP、IPsec、GRE 等 VPN 协议,并发隧道数不少于 6 条。边缘网关应支持 H.264、H.265 等视频编解码标准,以及 G.711、G.723、G.729。边
基于AM5728 DSP+ARM的物流机器人,实现自动化分拣投递功能概述与应用领域国内物流业起步较晚,发展水平较低,在信息技术的应用方面与发达国家有很大差距,发达国家已普遍使用的一些技术设备在国内还很少使用,我国在物流费用上的经济损失每年达数百亿元,实现物流信息化已成为我国现代物流发展的必然趋势。快递物流的条形码识别系统的实施提升了物流企业的信息化水平,并可大大提高工作效率,降低成本,减少差错。系
信迈科技以逻辑语言为基础编写的H.264视频编解码,以IP核的形式,在FPGA器件上运行,基于FPGA的解决方案使用FPGA为核心器件,实现H.264编解码的IP核,此解决方案为纯硬件的解决方案,启动时间可以忽略,编码延迟为0.5ms.ASSP架构不灵活,而基于FPGA微处理器组合的系统虽然尺寸大但较为灵活,一直以来设计人员为创建PCB占位面积小的基于IP的流式视频系统,除了在这两者之间反复权衡外
内置独立的0.8T算力 NPU,芯片拥有丰富的外设接口,支持HDMI、EDP、MIPI、LVDS等屏幕外设,可通过GPIO、RS485、RS232、ADC等接口接入PLC编程控制器和光电转换模组传感器等。RK3568在工业主要用作物联网网关、NVR存储、工控平板、工业检测、工控盒等产品的处理器,广泛应用于工业巡检、进程控制、数据采集、控制计算机、IPC集中管理等场景。CODESYS Runtime
