




- @Y0071
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
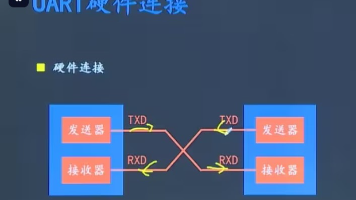
主设备向从设备发送8位数据后,从设备如果成功接收,则会向主设备回应一个应答信号(低电平),此时SDA由从设备操作,因为外接上拉电阻,所以默认状态下是高电平,所以应答信号是低电平;主设备<------------------------8位数据--------------------从设备。有主从设备之分,主设备通过从设备的设备地址进行数据的收发;主设备主导通信,能主动读取从设备的数据,而从设备只能
(注意:数据域应该按照实际采集的数据进行填写。(注意:数据域应该按照实际采集的数据进行填写。(注意:数据域应该按照实际采集的数据进行填写。文件夹中的串口调试助手打印火焰传感器数据并将截图保存至。的火焰传感器数据,按照高位在前低位在后正确封装赋值给。)将云平台上实时显示传感器数据信息的界面截图保存至。通信协议报文,将采集到的火焰传感器数据正确的填入。函数中实现:将转换好的火焰传感器数据通过以下表。网
想要画板子和把板子打出来的同志如果用我的代码记得把引脚改一下。复刻的成本打板加元器件差不多一百左右。OLED的驱动是江协的,MPU6050的驱动可以去复制火禾的,这两个代码我就不放上来了。引脚配置我的代码和火禾的不同,有需要可以按着下面的表格来配置。火禾实验室多功能可编程手表复刻-HAL版。1.STM32F103C8T6主控。9.Stlink下载器。8.公对公杜邦线诺干。
两路电机驱动模块:通过控制定时器的占空比来实现对轮子速度的控制,利用差速来实现拐弯。5路红外循迹模块:通过读取红外模块给的信号,来判断小车行驶的路线是否偏左或者偏右。3.5路红外循迹模块(读到白色 给高电平,读到黑色,给低电平)OLED模块:将占空比值显示出来,方便调参(可有可无)。五路红外模块寻迹小车(无PID简易开源HAL库版)占空比控制电机模块(函数名需要到.h文件下声明)4.STM32F1
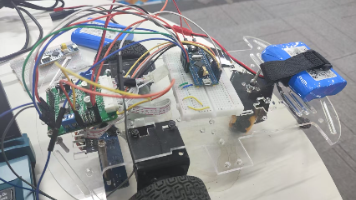
这样子PA6的频率为100HZ,PA7为200HZ;分配系数配置为79,通道1配置为上升沿,通道2配置为下降沿,NVIC勾上(定时器3同理)PS:测频率只需要配置通道一为上升沿,测占空比则需要配置通道二为下降沿。定时器16分频系数为8000-1,ARR为100-1。2.CCRx(捕获/比较寄存器值):相当于水杯的刻度。定时器2,3的通道1,2配置为输入捕获直接/间接模式。定时器17分配系数为400

两路电机驱动模块:通过控制定时器的占空比来实现对轮子速度的控制,利用差速来实现拐弯。5路红外循迹模块:通过读取红外模块给的信号,来判断小车行驶的路线是否偏左或者偏右。3.5路红外循迹模块(读到白色 给高电平,读到黑色,给低电平)OLED模块:将占空比值显示出来,方便调参(可有可无)。五路红外模块寻迹小车(无PID简易开源HAL库版)占空比控制电机模块(函数名需要到.h文件下声明)4.STM32F1
通道3设置为PWM 分配系数为79 重装载值为1000-1。Pulse占空比设置为500(NVIC记得勾上)将PC8设置为定时器3通道3。

两路电机驱动模块:通过控制定时器的占空比来实现对轮子速度的控制,利用差速来实现拐弯。5路红外循迹模块:通过读取红外模块给的信号,来判断小车行驶的路线是否偏左或者偏右。3.5路红外循迹模块(读到白色 给高电平,读到黑色,给低电平)OLED模块:将占空比值显示出来,方便调参(可有可无)。五路红外模块寻迹小车(无PID简易开源HAL库版)占空比控制电机模块(函数名需要到.h文件下声明)4.STM32F1
CC2530单片机技术与应用学习笔记
