- @VOR234
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了如何将SSD1306 OLED显示屏与ESP32S3和ATGM332D GPS模块集成,实现GPS数据的实时可视化交互。项目在原有GPS数据解析和本地坐标转换的基础上,新增了OLED显示屏功能,可实时显示经纬度、距离参考点距离、GPS信号状态以及平滑的数据可视化效果。硬件连接方面,ESP32S3通过UART与GPS模块通信,同时通过I2C接口连接SSD1306 OLED屏幕。核心代码实现
🥳🥳🥳现在,我们在本教程中,您学习了如何使用ESP32接入语言大模型之通义千问。🛹🛹🛹从而实现对外部世界进行感知,充分认识这个有机与无机的环境,后期会持续分享esp32跑freertos实用案列🥳🥳🥳科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。🤣🤣🤣。
本文介绍了使用ESP32-S3开发板与ATGM332D GPS模块实现定位数据解析和本地速度计算的方法。重点包括:1)硬件连接配置,通过串口读取GPS模块数据;2)使用TinyGPSPlus库解析NMEA语句;3)通过墨卡托投影转换将经纬度坐标转换为本地ENU坐标系,并基于位移变化计算实时速度和航向。项目源码已开源,适用于需要高精度位置和速度测量的应用场景。
在没收费之前,可以冲的。翻译过程中只有文本,没有图文表格左右两边的内容,目前没有联动起来,不能点右边,自动定位到左边原文,查阅原文不太方便。腾讯元宝-免费论文精读-翻译-实测+教程+点评。

摘要:本文介绍利用Trae开发环境和豆包大模型快速开发ESP32C3/C6数传电台系统。Trae作为新一代AI辅助工具,提供智能代码补全、上下文理解等功能,相比传统开发方式更高效。文章详细讲解系统框架、配置流程和硬件准备,包括自动配对、双向数据传输等核心功能实现。读者可通过注册火山引擎获取Trae开发工具,利用AI辅助完成ESP32开发项目。

随着人工智能技术的发展,图像理解成为了机器视觉领域的热点话题之一。通过深度学习算法,机器能够识别和理解图像中的内容,为许多应用场景提供了无限可能。本文将介绍如何使用ESP32S3 Sense开发板接入阿里云的大模型服务,实现图像的理解功能。我们将使用ESP32的摄像头模块拍摄照片,并通过阿里云提供的API接口发送图像数据,最后接收并解析API返回的结果。🥳🥳🥳现在,我们在本教程中,成功地使用

本文介绍如何利用豆包大模型辅助开发ESP32C3的ESPNOW双向通讯系统。ESP32C3芯片结合ESPNOW协议可实现无需WiFi的点对点高速通信,适用于物联网场景。文章详细说明了开发流程:首先注册豆包大模型账号,该AI工具可快速生成代码、解决技术问题;然后配置PlatformIO开发环境,准备ESP32C3开发板等硬件;最后提供核心代码实现,包括项目配置文件和ESPNOW通讯主程序。通过豆包大

OpenClaw本地部署指南 环境准备: 安装Node.js(推荐LTS版本)和Git 验证安装:node -v、npm -v、git --version 安装配置: 执行npm i -g openclaw安装 运行openclaw onboard配置 使用GitHub账号登录并验证 火山引擎订阅: 订阅Coding Plan套餐 配置baseUrl、apiKey和models参数 模型接入(以豆

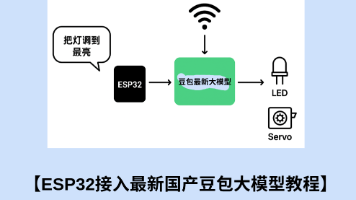
本文介绍如何通过ESP32S3接入国产大语言模型"豆包"升级版,实现自然语言控制LED灯亮度和舵机角度。文章提供了详细教程和优化指令集,并对比了豆包与其他国产大模型(如讯飞星火、MiniMax等)在响应时间、内容质量及免费token次数等方面的表现。文中包含豆包大模型的注册地址、技术架构说明(与火山引擎、火山方舟的关系)及API开发指南。作者强调教程无广告,已匿名处理源代码,便
通过本【强化学习环境配置+github demo复现】,您应该能够从零到一入门强化学习啦,也完成无人机的强化学习demo复现。从而实现对外部世界进行感知,充分认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。🤣🤣🤣我会持续更新对应专栏博客,非常期待你的三连!!!🎉🎉🎉如果鹏鹏有哪里说的不妥,还请大佬多多评论指教!!!👍👍👍下面有我的🐧