- @VBsemi
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
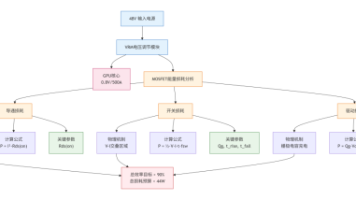
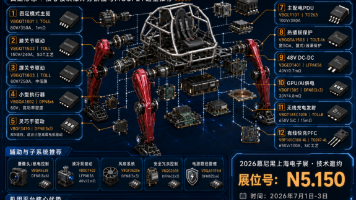
摘要:2026年机器人产业正从人形机器人向可载人变形机甲演进,其核心在于高功率密度电驱系统、AI实时控制和轻量化材料的发展。新一代机甲机器人具备载人、变形和复杂地形适应能力,MOSFET用量达400-800颗,接近新能源汽车规模。选型需考虑超低阻、高频控制和热管理等因素,涵盖髋关节主驱、四足模式控制、AI供电等模块。SiC MOSFET在高频高压应用中优势明显。未来机甲将融合新能源、AI和高可靠电
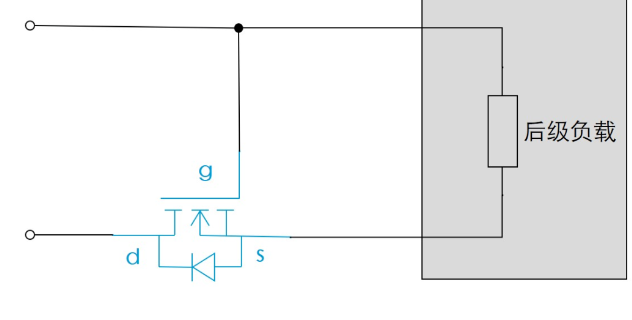
今天来分享一个超实用的电路设计 —— 基于 PMOS 的电源开关方案,通过低电压、小电流的 ON/OFF 信号,即可安全控制后级电路(VCC_OUT)的电源通断,广泛适用于嵌入式系统、电池供电设备及各类需电源管理功能的电子产品。由于Q1的栅极(G)和源极(S)电位基本相等(都约为VCC_IN),其V_GS ≈ 0V,Q1截止。电流可以从VCC_IN经Q1的源极(S)流向漏极(D),VCC_OUT端
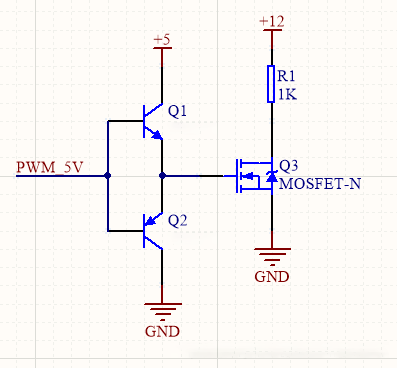
采用双 NMOS 半桥方案,成本低且自带自举升压电路,适配高压驱动;直接驱动 NMOS 仅适用于低端驱动(R1 为负载),5V PWM 波能满足其 Vgs 高于 4V 的导通要求,但 3.3V 单片机驱动时可能因 Vgs 不足导致 MOS 导通不充分,引发发热严重、负载电压异常等问题。作为共射极放大电路可放大驱动电流(不放大电压),加速栅极寄生电容充放电以提升开关速度,适用于 NMOS 低端驱动,
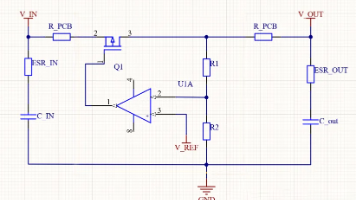
LDO 上电过冲的本质是ESR 过小导致的反馈调节失衡,通过合理调整输出电容的 ESR 或选择适配型号,可有效解决这一问题,保障电路在瞬态和稳态下的稳定性。
当开关切换存在死区时间(上管和下管都不导通 ) ,而电感电流不能中断,此时电感电流就会通过下管的体二极管流动,电流方向从 S 到 D。这表明 MOS 管导通后,电流方向可以双向流动,既可以从 D 到 S ,也可以从 S 到 D。MOS 管体二极管的瞬间电流一般与 NMOS 管导通后瞬间电流相当,一般不易成使用瓶颈,持续电流可依 MOS 管功耗限制计算,特殊场景选型时需关注其电流参数避免电路故障。同
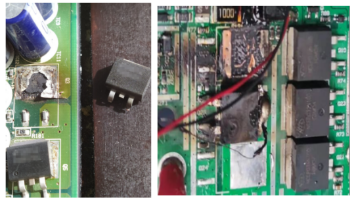
工控电源和服务器电源方面,由于MOSFET的Rds (on) 偏大、散热设计欠佳,加之芯片减薄等偷工减料行为,电源在长期满载运行时,宛如一座持续升温的火炉。最终,PCB板被烧得焦黑,机箱起火,整个机房陷入火海,企业的数据与业务遭受沉重打击,多年心血付诸东流。将 40A 印成 80A,60V 标成 100V,而其实际承受能力却严重不足,投入使用后,恰似纸糊的房屋,不堪一击。小家电领域同样危机四伏。使
1. 专业级AI烘焙系统- 多光谱联动控制:配合VBGQA1805光谱传感器- 实时监测面包褐变反应,动态调节上下管功率比- 支持0.1℃步进调温,完美复刻米其林配方曲线- 80A峰值电流满足商用级需求-用户实测:某烘焙工作室成品合格率从82%提升至99%2. 分子料理引擎- 毫秒级功率响应:开关频率达100kHz- 实现"低温慢煮"模式(55℃±0.3℃持续72小时)- 支持真空烹饪与电磁辅助加

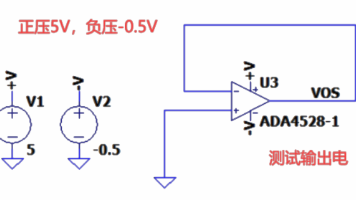
摘要:轨到轨运放单电源供电时难以输出真正的0V,需要负压电路。利用常见Buck芯片魔改成Buck-Boost输出负压是经济方案,但存在三大关键问题:1)芯片控制信号需电平转换;2)输入电容不能跨接Vin与-Vout,否则会形成浪涌回路;3)芯片实际承受电压为Vin+|Vout|,需重新评估耐压和电流余量。该方案虽能节省成本,但需深入理解参考地变化带来的影响,否则极易损坏电路。
当前全球消费电子产业正经历由端侧AI硬件引领的变革浪潮。据权威数据预测,2025年全球AI眼镜销量将突破350万台(同比增长230%),2035年市场规模有望达14亿台,与智能手机相当。端侧大模型(如通义千问、文心一言)与轻量化AR显示方案的融合,使AI眼镜兼具多模态交互与全天候佩戴特性;阿里、华为、小米、百度、腾讯、360等国内头部厂商密集发布新品,周鸿祎更在互联网大会强调“显示功能是AI眼镜差
为了留出足够的时间给导通时间,开关过程(上升+下降时间)必须非常短,假设不能超过周期的5%,即50ns。因为要获得极低的Rds(on),通常需要更大的晶元面积,这会导致更大的栅极电容(Ciss)和Qg。从数据手册上选定的那个“最佳”MOS管,不再是凭感觉或简单排序,而是通过上述严密的系统分析和数学计算“推导”出来的。这里的核心目标不再是简单的“供电”,而是在极高的速度下,稳定、高效地管理一股巨大的