- @Uicore
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
UM621 系列模块是和芯星通科技(北京)有限公司自主研发的 GNSS 双频+MEMS 组 合导航模块。模块基于完全自主知识产权的多系统、双频点、高性能 SoC 芯片- UC6580 设 计,内置 6 轴惯导器件,支持多系统双频联合定位或单系统独立定位,直接输出 GNSS 与 MEMS 组合定位结果,即使在隧道、地下车库也能够实现连续定位。UM621 系列模块生产过程符合 IATF 16949;其

标题中所说的“”日期延迟输出”问题与定位无关,这个日期需要从电文获取,每30秒才有一次机会,定位一般在6秒以内可以完成,所以有很大的概率定位状态下是无日期信息的;日期需要一段时间才能正常给出,正常信号环境下这个时间会小于30秒。
UPrecise 是和芯星通独立开发的评估软件, 旨在帮助用户便捷地对公司产品进行可视化操作。用户可通过该软件以串口或端口的方式与接收机进行交互并直观地查看其状态信息,连接后 UPrecise 将自动识别接收机的波特率和类型,动态显示该类型接收机特有的消息配置和语句解析。

描述的焊盘超出模块外框 0.49mm;因这些焊盘是射频管脚,希望其在表。为了有效降低焊接连锡的概率,功能管脚焊盘设计的比模块管脚更窄。层的走线尽量短,减小外部干扰对射频信号的影响,所以设计的适当短一些。描述的焊盘是射频管脚,希望其阻抗尽量连续,所以宽度还保持与模块管脚。为了方便测试,功能管脚焊盘设计的较长、超出模块外框较多。注 最新的封装设计推荐, 请参考和芯星通官方用户手册。描述的焊盘超出模块外

定位模块和芯片串口电平为LVTTL电平,高电平为3.3/1.8V,而电脑串口一般为RS232电平,两者之间需要进行电平转换才能进行正常通讯。确认与定位模块或芯片连接的串口号和波特率是否正确。定位模块和芯片常用的波特率为:9600、115200、230400、460800。用万用表或者示波器查看定位模块或芯片的电源输入引脚,查看供电以及电压是否正常。

和芯星通的车载定位解决方案,涵盖了从单频到多频、从卫星导航到多源融合、从米级到厘米级定位精度的全方位技术覆盖,已经在近二十个知名品牌的数十款智驾车型中实现了量产应用。基于UFirebirdII芯片平台的车载定位解决方案充分满足了汽车行业对智能座舱、T-BOX以及不同级别智能驾驶应用的需求,在城市NOA场景,定位精度可达分米级或厘米级,助力实现高阶智能驾驶。》、《2024中国汽车芯片创新成果》两大奖

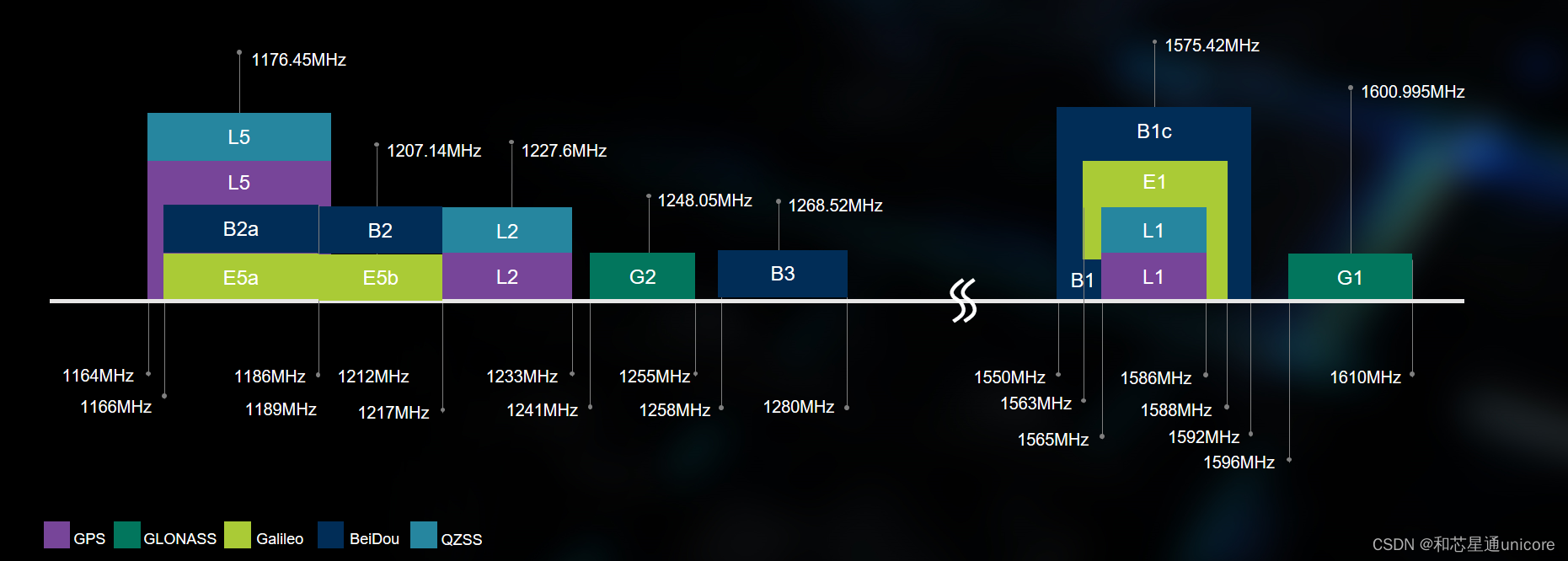
这里所说的系统通常指指全球导航卫星系统(简称GNSS),例如BDS, GPS, GLONASS, Galileo, QZSS, SBAS 等。多频是指GNSS接收机工作在多个频段,如L1/L2/L5/L6等,通常多频GNSS接收机比单频GNSS接收机具有更高的信号捕获灵敏度、更强的抗干扰性能和更高的定位精度。双频是指GNSS接收机工作在两个频段,一般为L1/L2,或L1/L5,双频接收机可以根据两