- @TjlIlSzJbh
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
这个地址后面配置MAC的时候要特别注意,很多兄弟在这里栽跟头。项目开发用到了Dp83848这一个以太网芯片,本人发现其配置起来比较麻烦,所以整理了一份STM32F107单片机驱动Dp83848的程序代码例程,方便大家学习相关代码的配置。项目开发用到了Dp83848这一个以太网芯片,本人发现其配置起来比较麻烦,所以整理了一份STM32F107单片机驱动Dp83848的程序代码例程,方便大家学习相关代
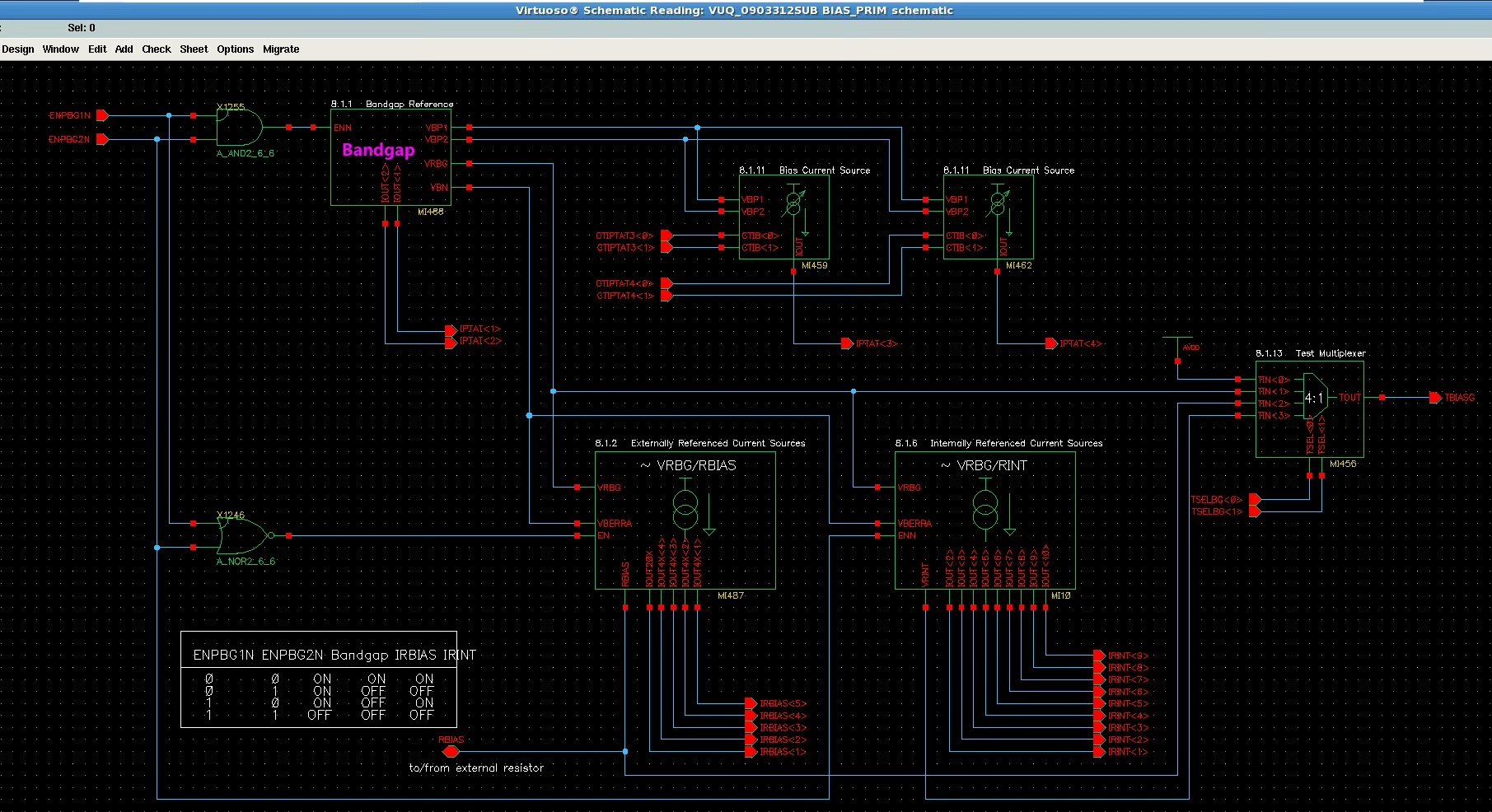
拿到原理图之后需要自己换成自己所持有的PDK就可以跑仿真了,国内大部分公司都是这样设计芯片产品的,参考价值非常大,整个芯片里面有非常多的模块,适合研究生没有项目的同学,可以拿里面的一些模块当做项目,也适合工作的拿来参考对比设计!拿到原理图之后需要自己换成自己所持有的PDK就可以跑仿真了,国内大部分公司都是这样设计芯片产品的,参考价值非常大,整个芯片里面有非常多的模块,适合研究生没有项目的同学,可以
FB块(Function Block)是西门子PLC编程中常用的一种功能块。它允许用户封装特定的功能逻辑,以便在多个地方重复使用。对于KUKA机器人来说,通过FB块实现外部启动PLC程序,可以简化编程流程,提高效率。在PLC程序中,首先需要定义一个FB块。这个块将包含KUKA机器人与PLC之间的通信逻辑。VAR.Input:// 启动信号// 停止信号// 机器人状态END这个简单的FB块定义了启

DL00402-基于YOLOv5的旋转框目标检测dota标注数据集格式转yolov5 rotation标注格式脚本 utils/cut2rotation.sh ,修改数据集路径和滑窗切片大小及重叠面积即可数据集路径修改修改data文件夹下数据集定义anchor聚类cd utils,修改数据集路径,然后python autoanchors.py即可模型anchor修改将聚类的anchor更新到模型定

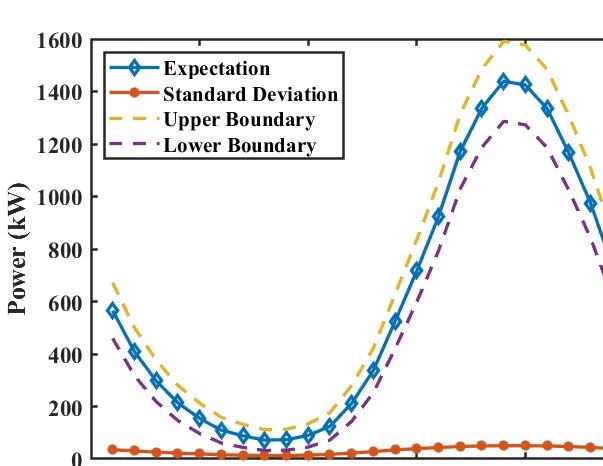
高斯过程回归是一种非参数化的贝叶斯方法,它通过定义一个先验分布来建模函数空间中的函数。与传统的参数化方法不同,GPR不需要预先指定函数的形式,而是通过数据来推断函数的后验分布。这种特性使得GPR在处理小样本数据和复杂非线性关系时表现尤为出色。基于高斯过程回归(GPR)的时间序列区间预测在数学上,高斯过程可以被看作是一个随机过程,其中任意有限个点的分布都是多元高斯分布。具体来说,假设我们有一个输入变
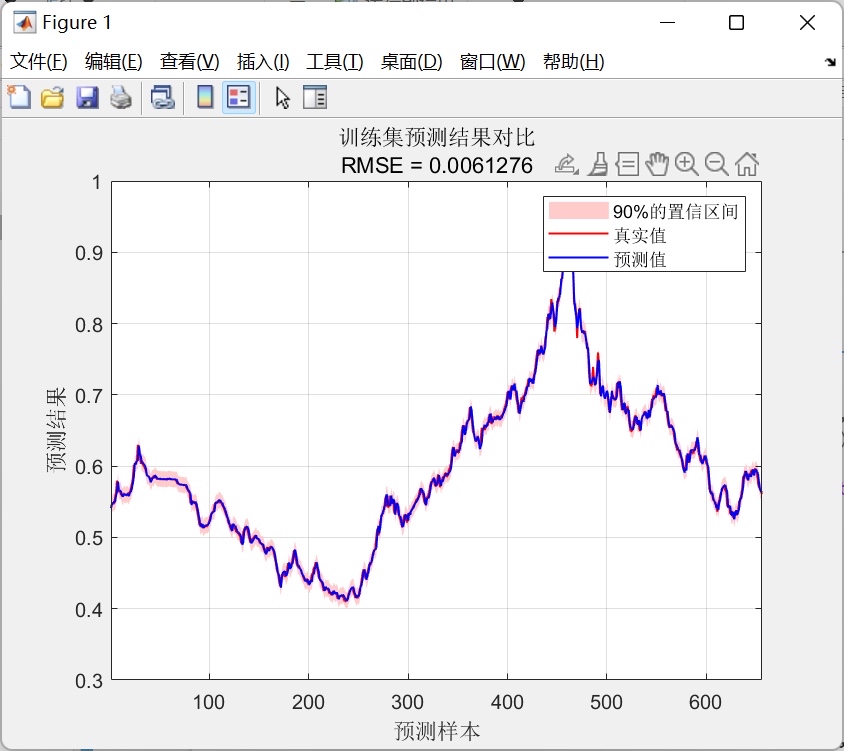
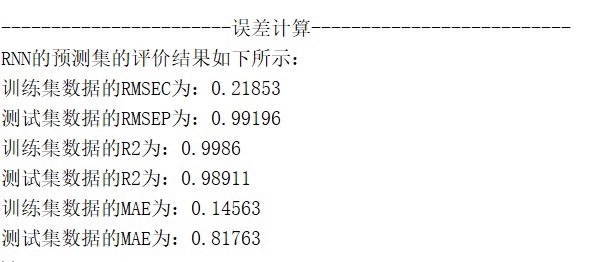
RNN预测模型做多输入单输出预测模型,直接替换数据就可以用。程序语言是matlab,需求最低版本为2021及以上。程序可以出真实值和预测值对比图,线性拟合图,可打印多种评价指标。PS:以下效果图为测试数据的效果图,主要目的是为了显示程序运行可以出的结果图,具体预测效果以个人的具体数据为准。2.由于每个人的数据都是独一无二的,因此无法做到可以任何人的数据直接替换就可以得到自己满意的效果。这段程序主要
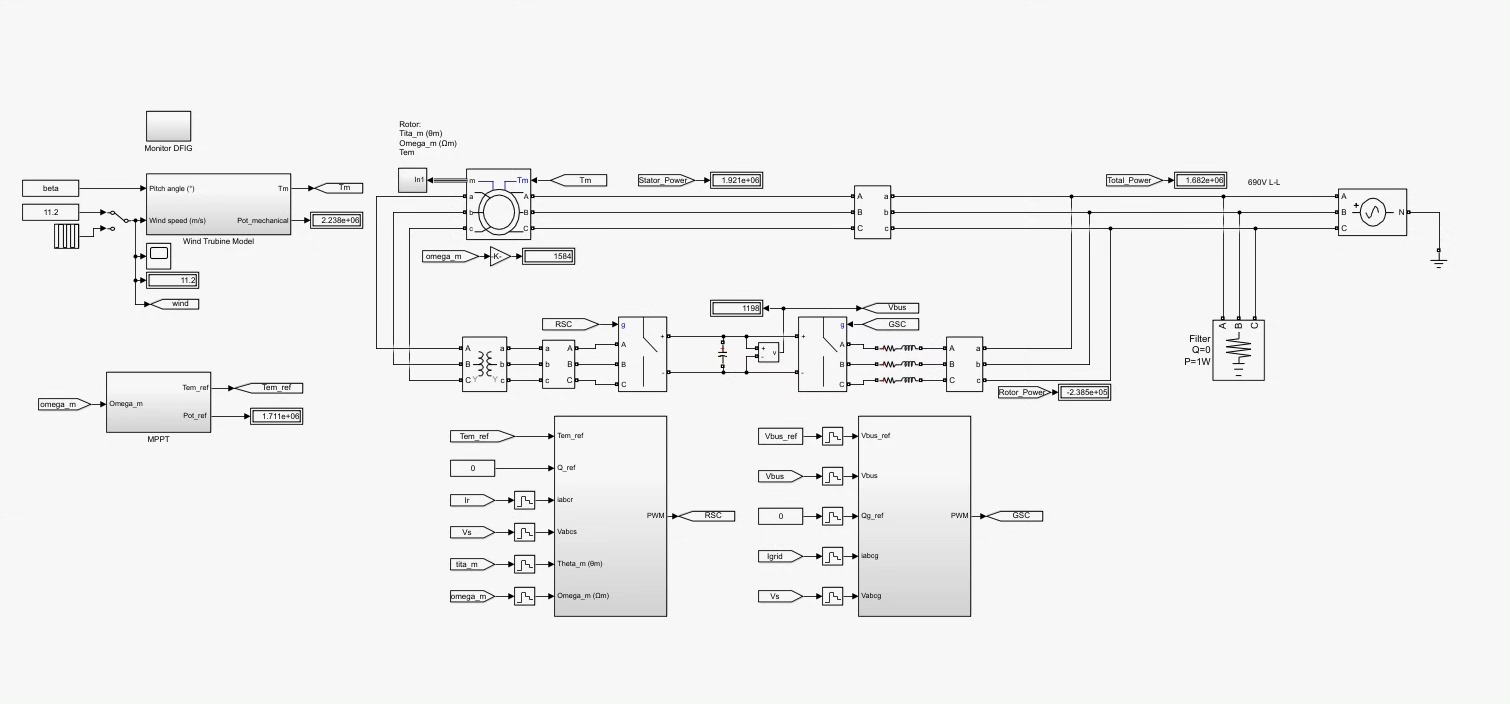
双馈系统这种强非线性的模型,用变步长算法能节省30%以上的仿真时间。咱在Simulink里搭模型的时候,最怕遇到那种参数调半天死活不收敛的情况。给你们看个真实案例——去年调试他励风机模型,转子侧变流器的控制回路硬是让我熬夜改了三版参数。这个PI调节器的参数设置很讲究,分享个调试时发现的规律:当电网电压跌落超过15%时,积分时间常数要砍掉三分之一,否则系统容易振荡。先整点干货,双馈风机建模的核心在机
有趣的是,当把这个权重改成8:2时,优化结果会倾向让部分车辆在凌晨充电——虽然省了电费,却可能让车主第二天发现根本没充满。用蒙特卡洛模拟生成500辆电动车的无序充电曲线,Matlab里的poissrnd函数模拟车主回家的随机时刻,电池容量按正态分布设定。优化目标包括充电费用最低,充电时间达到要求(电动汽车充到足够的电)考虑电动汽车充电对电网负荷的影响,使负荷峰谷差最小。优化目标包括充电费用最低,充
本文深入剖析一套基于 C# 与 OpenCvSharp 构建的工业级机器视觉系统。该系统面向高精度定位、缺陷检测与模板匹配等典型工业应用场景,采用模块化、可配置化的设计理念,支持 Basler 等主流工业相机接入,并具备完整的配方管理、参数序列化、图像处理工具链及结果可视化能力。整体架构清晰,职责分明,适用于自动化产线中的视觉引导、质量检测与过程控制。该视觉系统是一个功能完备、架构清晰、扩展性强的
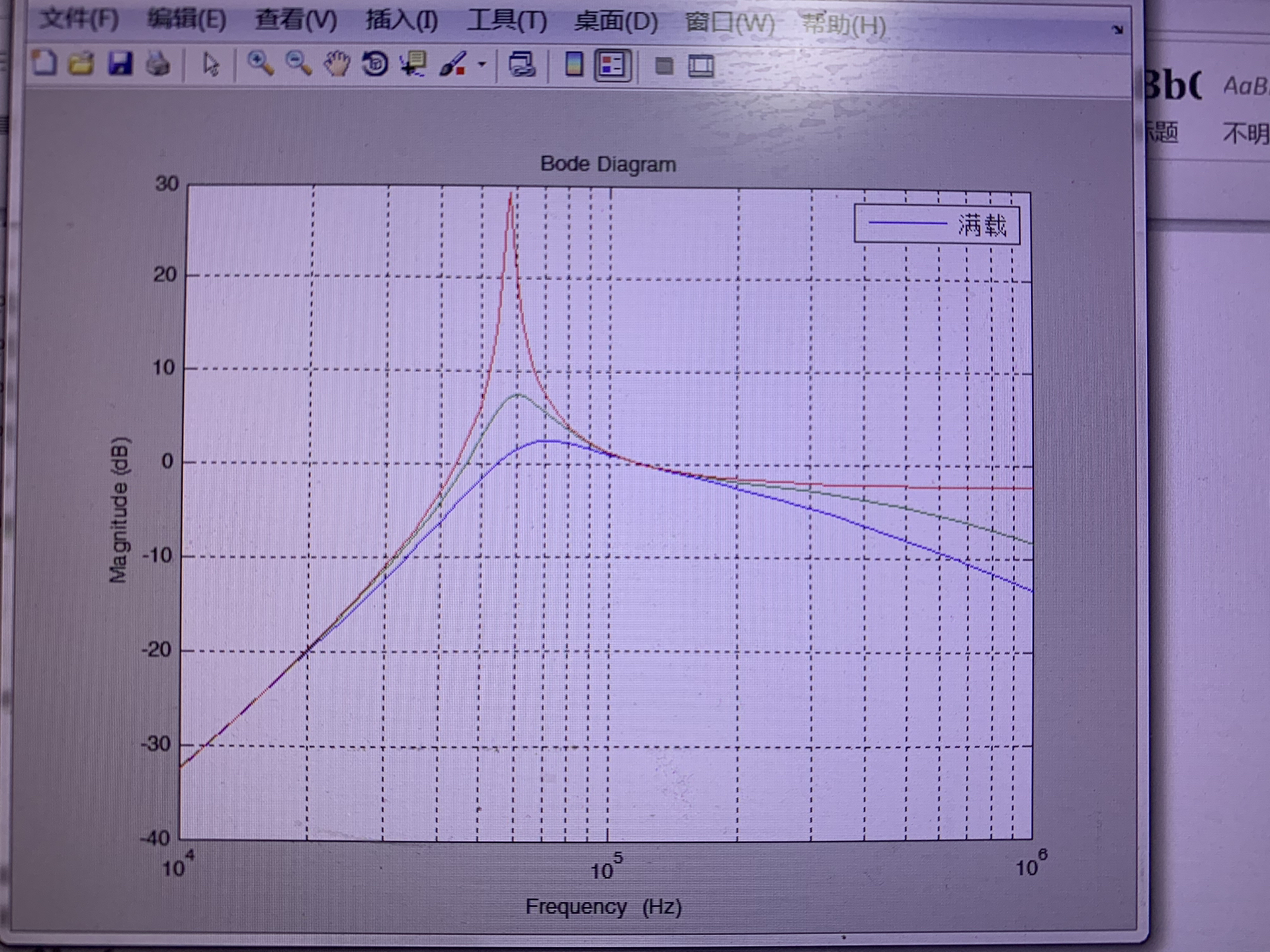
LLC全桥仿真,matlab,有配套增益、伯德图分析,文档在电力电子领域,LLC全桥变换器凭借其软开关特性、高效性等优点,被广泛应用于各类电源系统。今天咱就聊聊如何用Matlab对LLC全桥进行仿真,并配套做增益和伯德图分析,还会提及相关文档整理。