




- @Sugar_pp
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
点云是一种重要的几何数据结构。由于其格式不规则,大多数研究人员会将此类数据转换为规则的三维体素网格或图像集合。然而,这会导致数据量过大并引发问题。本文设计了一种新型神经网络,它直接处理点云数据,并很好地保留了输入点的置换不变性。PointNet 网络为对象分类、部件分割和场景语义解析等应用提供了统一的架构。PointNet 虽然简单,但却高效且有效。经验表明,它的性能与当前最佳技术相当甚至更好。从

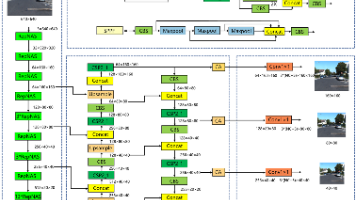
自动驾驶是人工智能的一个重要分支,实时准确的目标检测是保证自动驾驶车辆安全稳定运行的关键。为此,本文提出了一种基于改进的YOLOv5的快速准确的自动驾驶目标检测器。首先,对YOLOv5算法进行了改进,引入结构重参数(REP),通过训练-推理解耦提高了模型的精度和速度。此外,在训练阶段引入了神经架构搜索法对多分支再参数化模块中的冗余分支进行裁剪,提高了训练的效率和精度。最后,在网络中加入小目标检测层
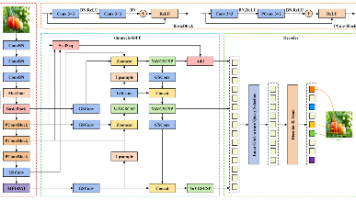
番茄具有很高的营养价值,需要对成熟果实进行准确的成熟度鉴定和选择性采收,以显著提高番茄收获管理的效率和经济效益。以往对番茄智能收获的研究往往只以番茄为目标,缺乏对番茄成熟度的细粒度检测。这一缺陷导致了未成熟腐烂水果的不慎收获,造成经济损失。此外,在自然环境中,光照不均匀、叶片遮挡和果实重叠阻碍了机器人系统对番茄成熟度的准确评估。同时,番茄成熟度检测中对高精度和快速响应的要求与使模型轻量化以降低硬件
裂缝是桥梁养护的主要目标,准确检测裂缝有助于保证桥梁的安全使用。针对传统图像处理方法难以准确检测裂纹的问题,引入深度学习技术,提出一种基于改进的DeepLabv3+语义分割算法的裂纹检测方法。在网络结构上,DeepLabv3+网络中引入了密集连接的空洞空间金字塔池化模块,使得网络能够获得更密集的像素采样,从而增强网络提取细节特征的能力。在获得较大感受野的同时,网络参数数量与原算法保持一致。采集不同

word参考文献引用1、选中参考文献->自动编号(可根据需要自定义编号格式)2、在需要引用的地方,引用->交叉引用多个参考文献连续引用一、如果是两篇文献,如“限制了其在资源受限环境下的应用,如自动驾驶、辅助医疗和移动设备等[1,2]”1、按照上述步骤引用两个参考文献2、选中[1][2],右击切换域代码结果为:3、在下图所示位置分别加入【#“[0” 】、【#“0]” 】,并在两个{}中间
