
写文章




- @SeniorMao007
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
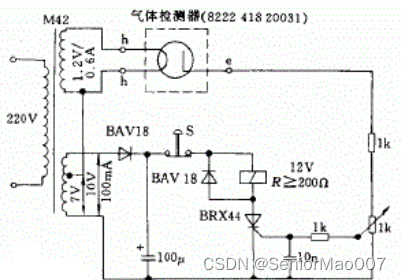
气体传感器电路图
某些半导体具有这样一种特性,即在充有一定气体的周围空气中其电阻值会随温度的升高而急剧减小。这种效应也可以表现为;当气体浓度达到一定时其材料的性能将发生很大变化。利用这种半导体材料即可制成气体传感器。属于这种材料有三氧化铁、氧化锡和氧化锌等。它们对甲烷、丁烷、乙醇和苯等气体或蒸汽有反应。
二氧化碳气体传感器检测电路
二氧化碳传感器是用于检测二氧化碳浓度的机器
机器人运动PID控制
位置控制:e(t)=r(t)−y(t),其中 r(t) 是设定的目标位置,y(t) 是当前的实际位置。速度控制:e(t)=vset(t)−v(t),其中 vset(t) 是设定的目标速度,v(t) 是当前的实际速度。加速度控制:e(t)=aset(t)−a(t),其中 aset(t) 是设定的目标加速度,a(t) 是当前的实际加速度。PID控制器是机器人运动控制中的重要工具,通过合理选择和

机器人运动PID控制
位置控制:e(t)=r(t)−y(t),其中 r(t) 是设定的目标位置,y(t) 是当前的实际位置。速度控制:e(t)=vset(t)−v(t),其中 vset(t) 是设定的目标速度,v(t) 是当前的实际速度。加速度控制:e(t)=aset(t)−a(t),其中 aset(t) 是设定的目标加速度,a(t) 是当前的实际加速度。PID控制器是机器人运动控制中的重要工具,通过合理选择和
到底了