




- @QIN_student
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
1. 第一个CUDA程序1. 第一个CUDA程序目录结构:├── srcmain.cu 文件Makefile 文件终端运行 make run 命令,会输出16个hello.2.CUDA中的grid和block一般来说:•一个kernel对应一个grid•一个grid可以有多个block,一维~三维•一个block可以有多个thread,一维~三维。

写在前面: 本文个人笔记,可能存在错误理解,谅解!
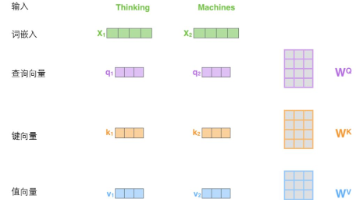
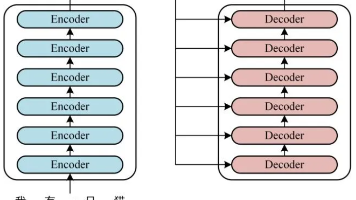
Transformer 与 RNN 不同,可以比较好地并行训练。Transformer 本身是不能利用单词的顺序信息的,因此需要在输入中添加位置 Embedding,否则 Transformer 就是一个词袋模型了。Transformer 的重点是 Self-Attention 结构,其中用到的Q, K, V矩阵通过输出进行线性变换得到。
点云是某个坐标系下的点的数据集。点包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等等。点云是在同一空间参考系下表达目标空间分布和目标表面特性的海量点集合。在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合,称之为“点云”(Point Cloud)。
Transformer 与 RNN 不同,可以比较好地并行训练。Transformer 本身是不能利用单词的顺序信息的,因此需要在输入中添加位置 Embedding,否则 Transformer 就是一个词袋模型了。Transformer 的重点是 Self-Attention 结构,其中用到的Q, K, V矩阵通过输出进行线性变换得到。
点云是某个坐标系下的点的数据集。点包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等等。点云是在同一空间参考系下表达目标空间分布和目标表面特性的海量点集合。在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合,称之为“点云”(Point Cloud)。
1. 第一个CUDA程序1. 第一个CUDA程序目录结构:├── srcmain.cu 文件Makefile 文件终端运行 make run 命令,会输出16个hello.2.CUDA中的grid和block一般来说:•一个kernel对应一个grid•一个grid可以有多个block,一维~三维•一个block可以有多个thread,一维~三维。
该头文件 utils.hpp 定义了一个简单的日志打印工具,支持不同级别的日志输出,并带有颜色标识。通过宏定义 LOG、LOGV 和 LOGE,可以方便地输出信息、详细信息和错误日志。日志级别通过 Level 枚举类型区分,日志函数 __log_info 根据级别为日志信息添加不同的颜色前缀,并格式化输出到标准输出。使用示例展示了如何调用这些宏来输出不同类型的日志信息。该工具适用于需要简单日志功能

写在前面: 本文个人笔记,可能存在错误理解,谅解!
点云是某个坐标系下的点的数据集。点包含了丰富的信息,包括三维坐标X,Y,Z、颜色、分类值、强度值、时间等等。点云是在同一空间参考系下表达目标空间分布和目标表面特性的海量点集合。在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合,称之为“点云”(Point Cloud)。