- @PuEJbfWWgo
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
(miniwiggler驱动官方下载:https://www.infineon.com/cms/en/product/promopages/das/ 别下到Cyclone V版本!本软件用于小白基础上手,可正常下载,watch,local,memory,register等均支持,专业性的功能还请正版4万的软件。本软件用于小白基础上手,可正常下载,watch,local,memory,registe
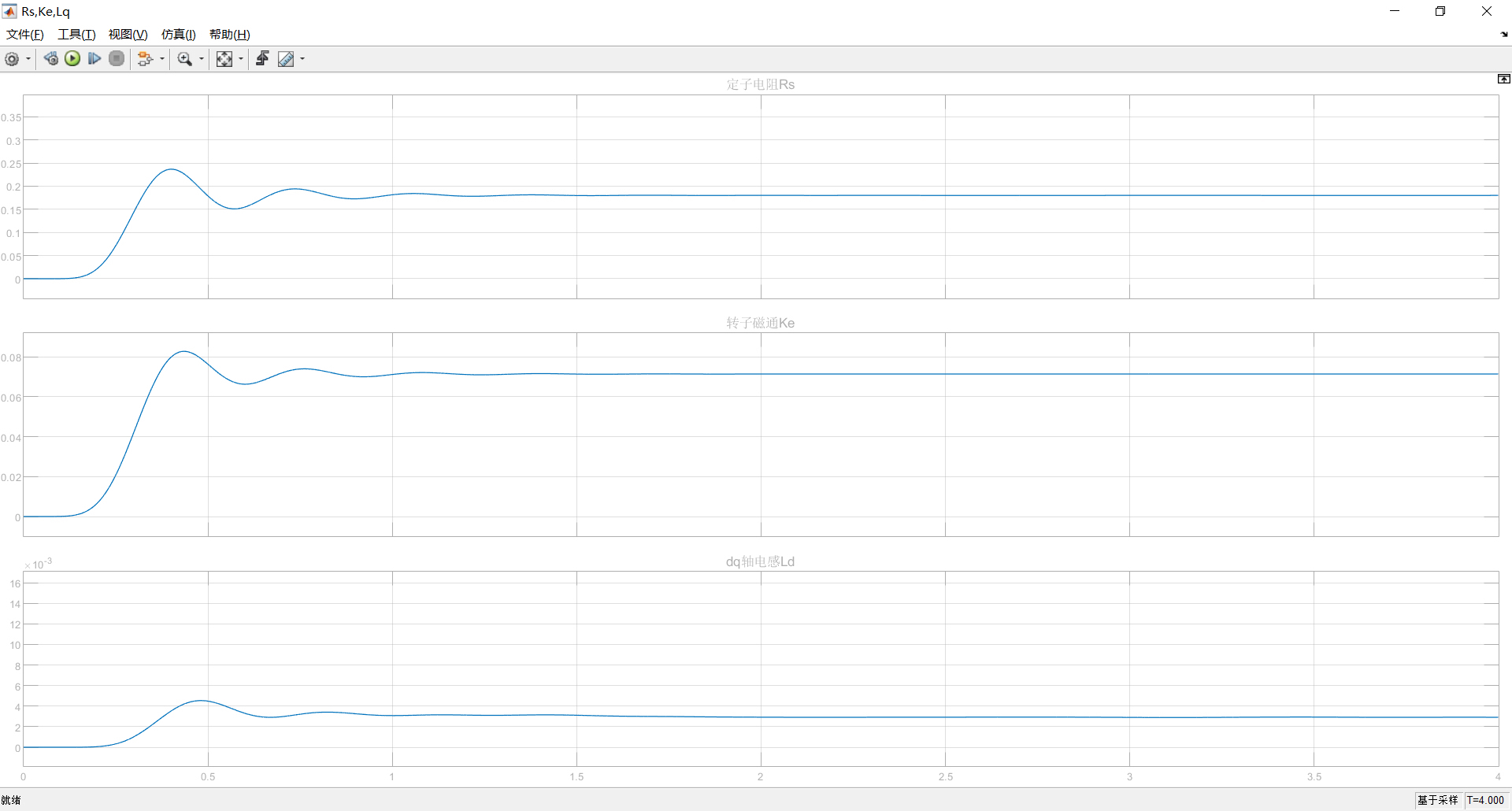
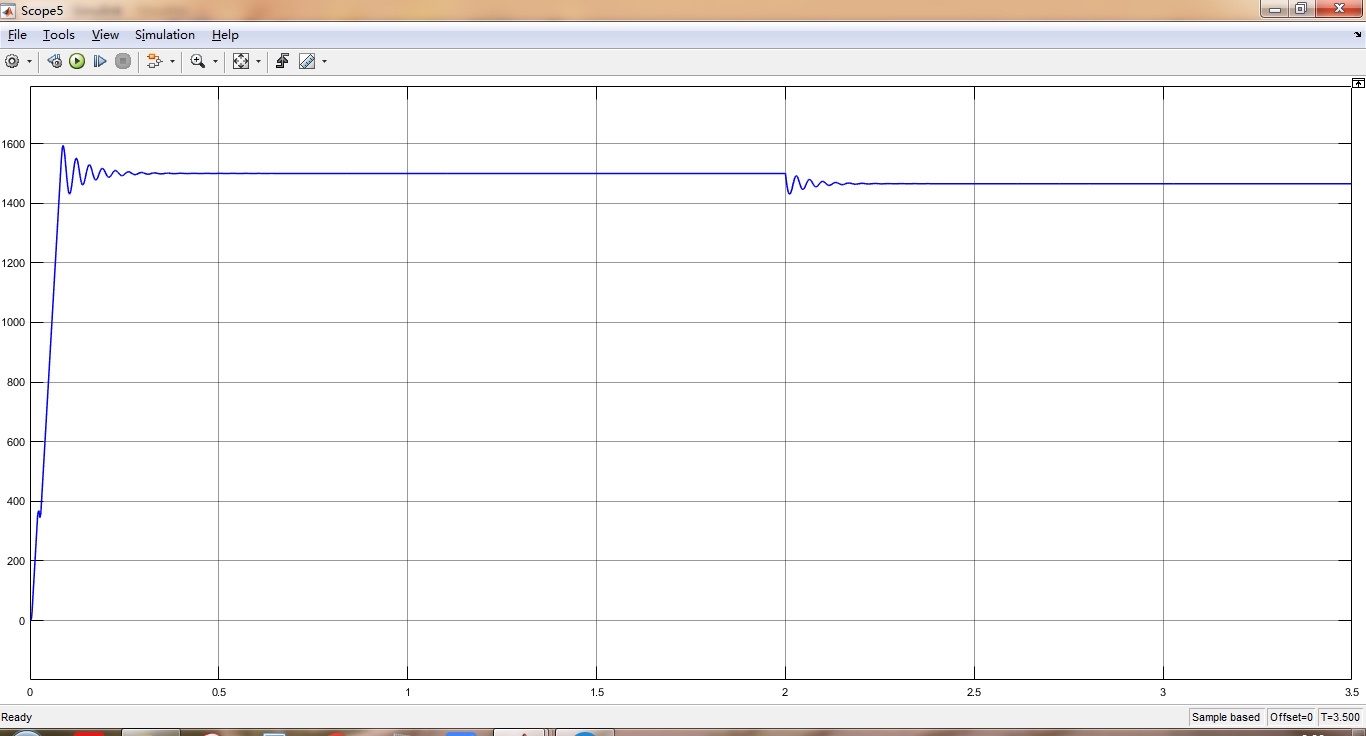
没观测器的系统得等转速掉了才开始补偿,而有观测器的系统在负载变化的瞬间就能捕捉到转矩波动。实测数据对比很有意思:突加5N·m负载时,无观测器的系统转速跌落300rpm后2秒才恢复,而带前馈补偿的系统跌落不到50rpm,0.3秒内稳定。说到底,负载转矩观测器就像给电机装了预判未来的眼睛。一方面可以较好的跟踪负载转矩的变化,另一方面可以作为前馈减小电机转速的波动。负载转矩观测器无论是对静态的负载变化还
事件触发控制代码,每个代码有对应参考文献1.多智能体中基于事件触发的协议2.多智能体分布式系统的事件触发控制3.基于观测器的非理想线性多智能体事件触发的跟踪一致性4.非线性不确定扰动多智能体系统固定时间事件触发一致性控制5.固定拓扑和切换多智能体分布式动态事件触发控制6.线性多智能体全分布式事件触发协议算法7.有限时间约束下的分布式事件触发控制方法在多智能体系统的研究领域,事件触发控制是一个相当热

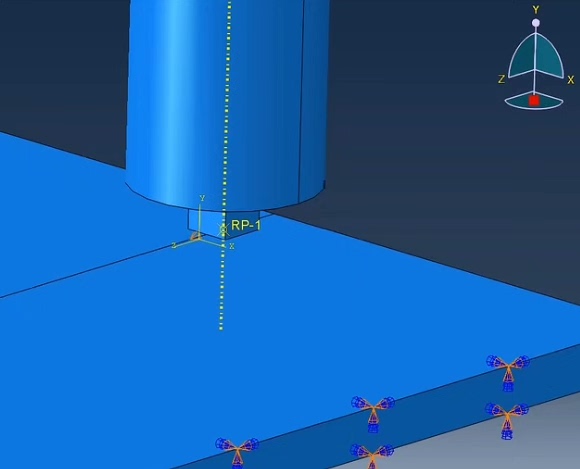
abaqus铝合金搅拌摩擦焊,顺序热力耦合中残余应力的仿真,根据仿真温度去模拟焊后残余应力,焊接过程中不同焊接方案下的温度、瞬态应力变化曲线以及焊后残余变形,对比最优焊接方案。abaqus铝合金搅拌摩擦焊,顺序热力耦合中残余应力的仿真,根据仿真温度去模拟焊后残余应力,焊接过程中不同焊接方案下的温度、瞬态应力变化曲线以及焊后残余变形,对比最优焊接方案。记住,残余应力在收尾阶段会突然翘尾巴,这个特征峰
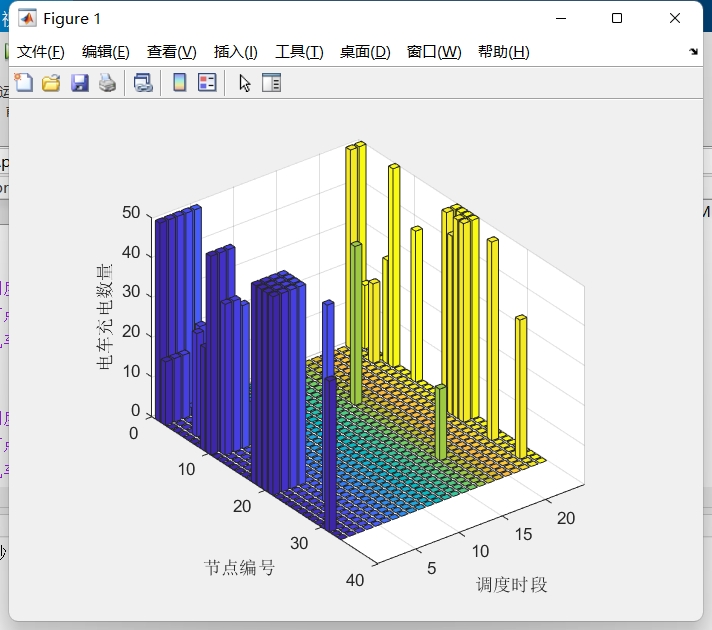
% 2. 定义优化变量% 发电机启停状态(二进制变量)和出力% 二阶锥松弛专用变量:节点电压平方,避开极坐标的非线性sin/cos% EV充电功率:节点2、3的总充电功率% 行对应节点2、3,列对应时段% 支路有功/无功功率,用来写潮流约束目标函数和原文一致,最小化总运行成本:包括发电燃料成本和EV充电的峰谷电价成本%% 4. 目标函数与求解% 总发电成本% 总EV充电成本:MW·h * 元/MW
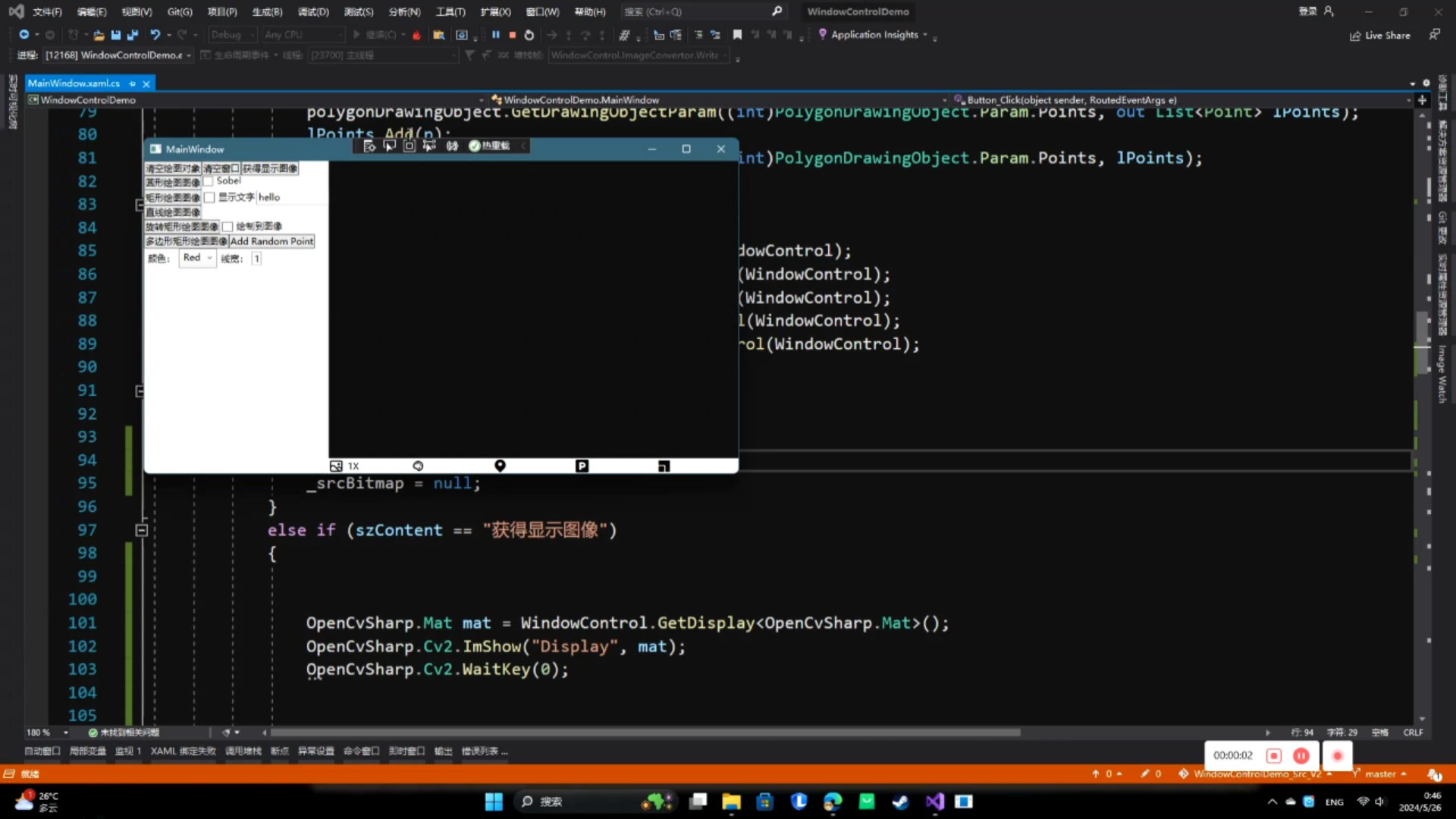
基于WPF&OpenCV的高级显示控件2.0是一款面向图像可视化与交互操作的专业控件库,采用.NET Framework 4.8框架开发,融合WPF的高效UI渲染能力与OpenCV的强大图像处理功能。控件支持图像拖入显示、多类型绘图对象交互、图像特效处理等核心功能,通过WPF的Adorner和Thumb组件实现绘图对象的拖拽、缩放、旋转等交互操作,适用于机器视觉、图像分析、工业检测等场景。颜色自定
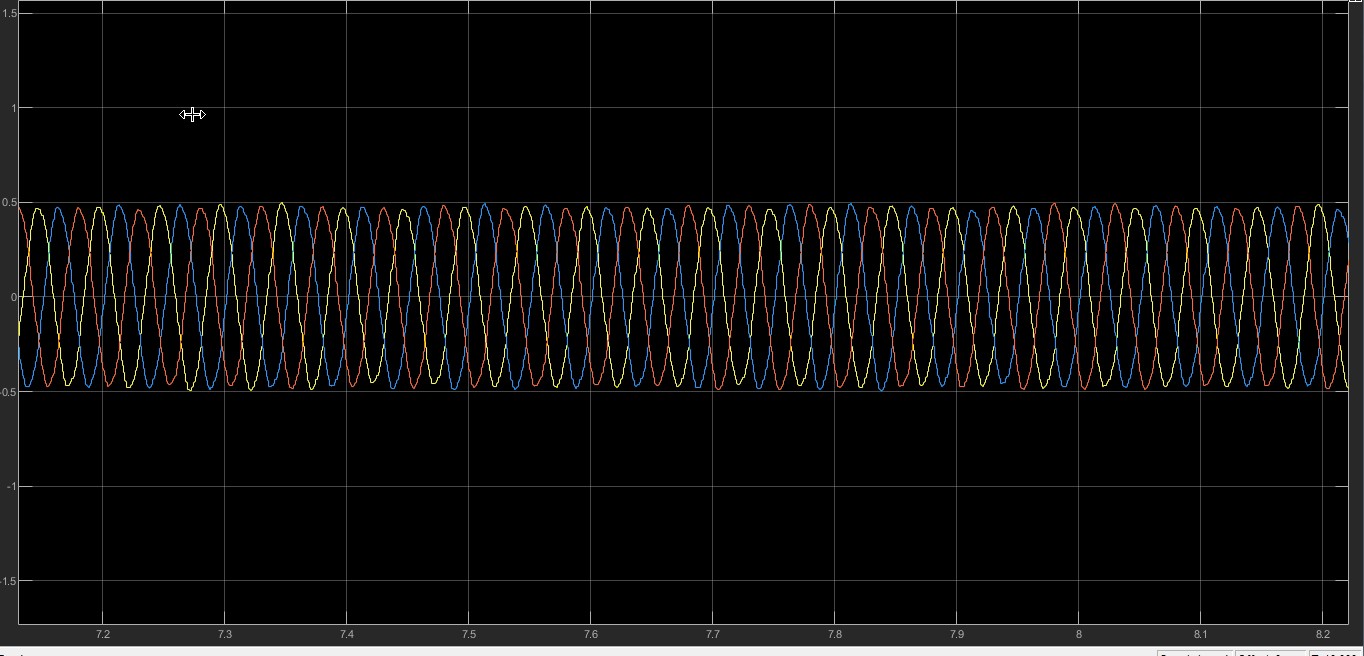
最近在研究三相异步电机的时候,发现用Matlab/Simulink搭模型真是个体力活。今天给大家分享一个我自己折腾出来的仿真模型,纯公式推导+模块搭建,不用现成的电机模块,跑出来的波形居然还挺有模有样的。本模型利用数学公式搭建了三相异步电机的模型,可以很好的模拟三相异步电机的运行性能,适合研究电机本体时修改参考,电机的各波形都很好可以很好的模拟三相电机。本模型利用数学公式搭建了三相异步电机的模型,
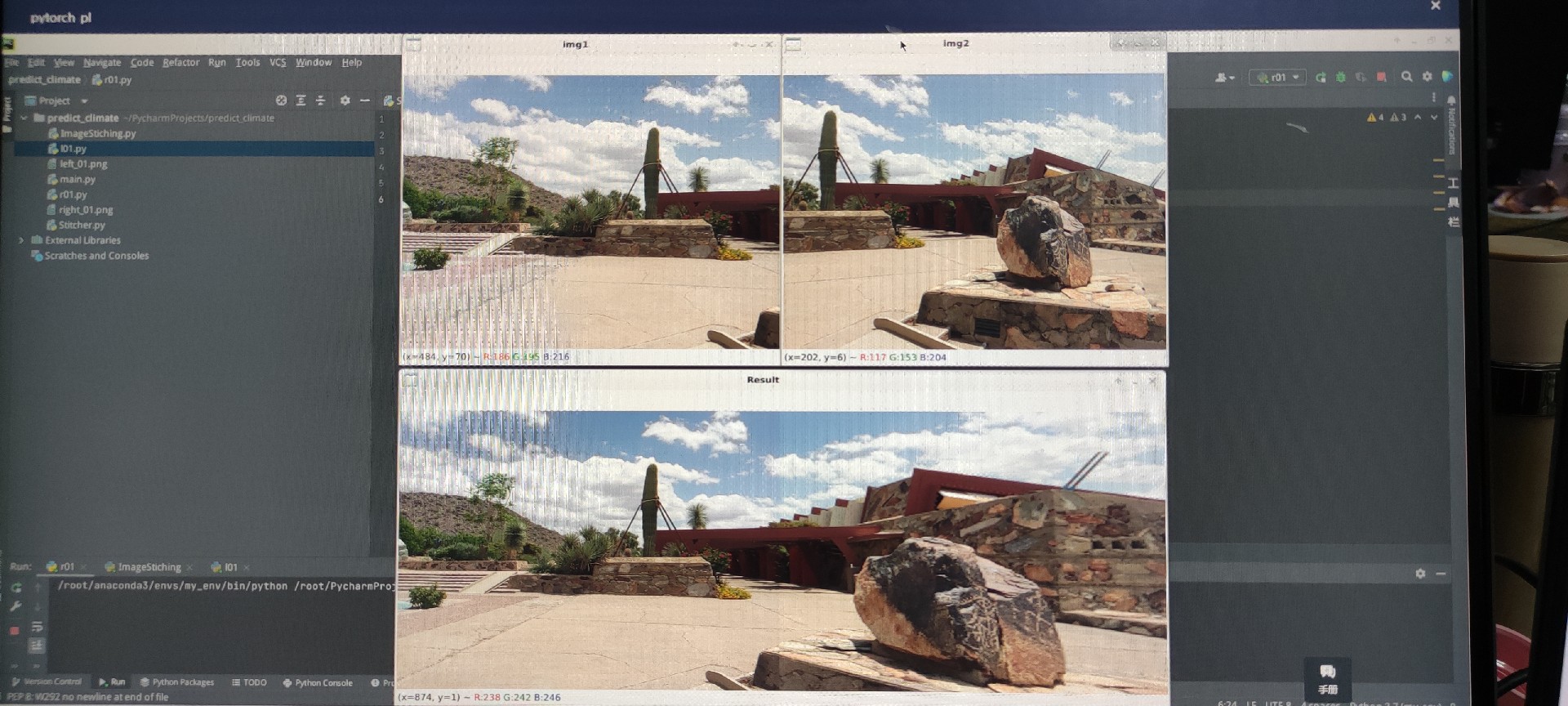
去年在实验室折腾了个基于CNN的识别方案,配合Unity搞了个三维可视化演示,算是把理论验证跑通了。后来在数据集中加入过曝光的合成图像,用OpenCV做了个随机光斑生成器才解决。使用python卷积神经网络做交通信号灯识别的自动驾驶,并在unity进行3d可视化。使用python卷积神经网络做交通信号灯识别的自动驾驶,并在unity进行3d可视化。另有全景图像配准算法源码,改进yolov5目标检测
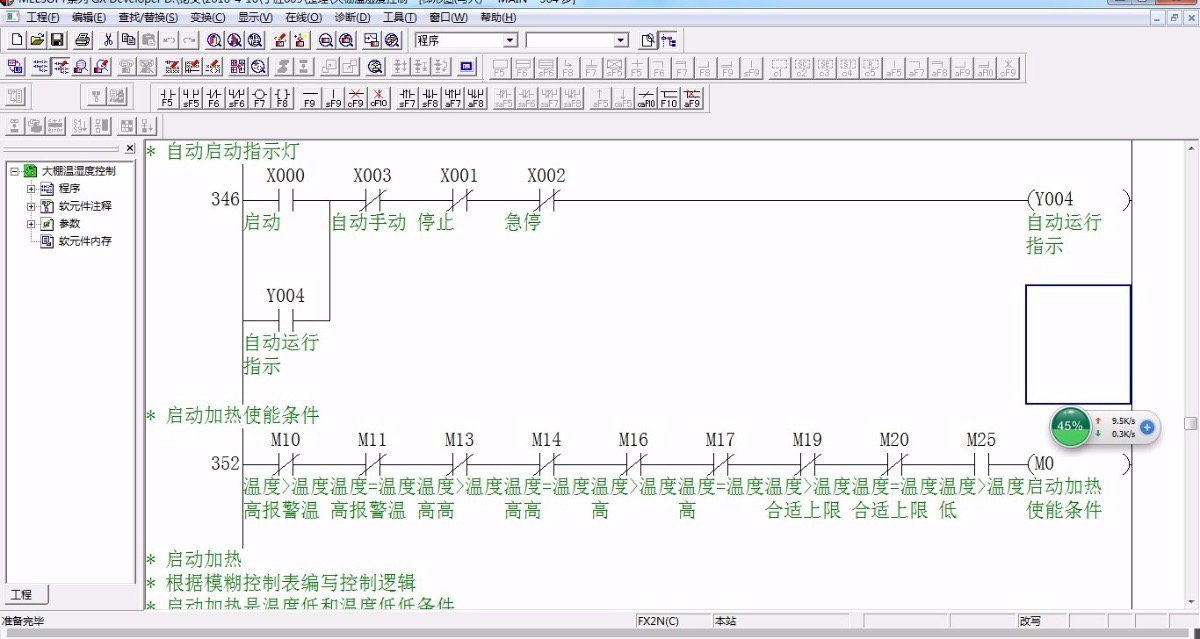
或许智能农业的真谛,就是把复杂的控制逻辑化作作物生长的自然韵律。这两段看似简单的逻辑,实际藏着三个关键设计:M8000作为系统总开关防止误触发,D100/D101寄存器实时存储传感器数据,Y000/Y001直接驱动执行机构。老张揉着惺忪睡眼准备手动开风机时,隔壁李技术员开发的PLC系统已经自动启动了除湿程序——这就是我们接下来要聊的智能温室控制系统的日常。组态画面设计才是真正的灵魂画手操作。在GT
这是一套完整的异步电机变压变频(VVVF)控制系统的C语言实现代码,采用模块化设计,适用于嵌入式变频器控制系统。系统基于SVPWM调制技术,实现了完整的V/F控制算法,包含自动转矩提升、转差补偿、振荡抑制等核心功能。Settings.h定义电机基本参数(电阻、电感、极对数等)设置系统基准值(电压、电流、频率)配置中断频率和采样周期定义变频器机型参数和电压等级// 电机参数示例#define RS