




- @PengWon
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
是基于沁恒CH347芯片设计的一款调试利器,支持高速USB,可以实现USB to UART,USB to SPI,USB to I2C,USB JTAG,USB to GPIO。
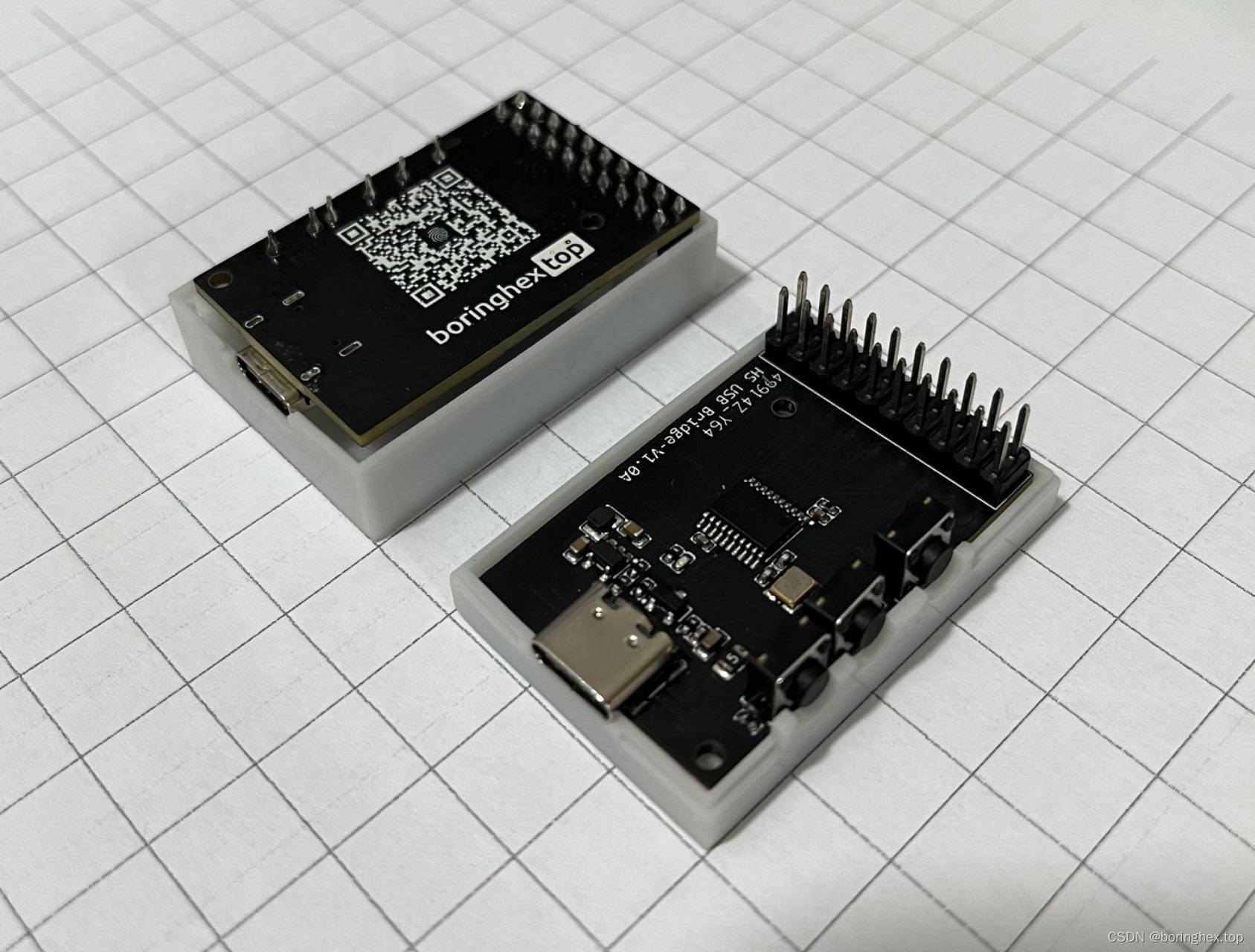
摘要:CH347是一款国产高性能USB转接芯片,支持JTAG/SWD调试功能,适用于STM32等单片机的程序下载与在线调试。文章详细介绍了CH347的硬件特性、驱动安装、STM32CubeIDE配置以及OpenOCD调试环境的搭建方法。通过JTAG/SWD四线或SWD两线连接方式,配合专用驱动和修改后的OpenOCD工具,可实现高速程序下载与在线调试功能(调试速度可达4000kHz)。文中还提供了
并发模式主要关注如何管理多个任务的并行执行,旨在提高系统的响应速度和资源利用率。线程池模式(Thread Pool Pattern)互斥锁模式(Mutex Pattern)生产者-消费者模式(Producer-Consumer Pattern)信号量模式(Semaphore Pattern)这些模式通过不同的方式组织任务的并行执行,解决了嵌入式系统中常见的资源竞争、任务调度等问题。线程池模式通过创
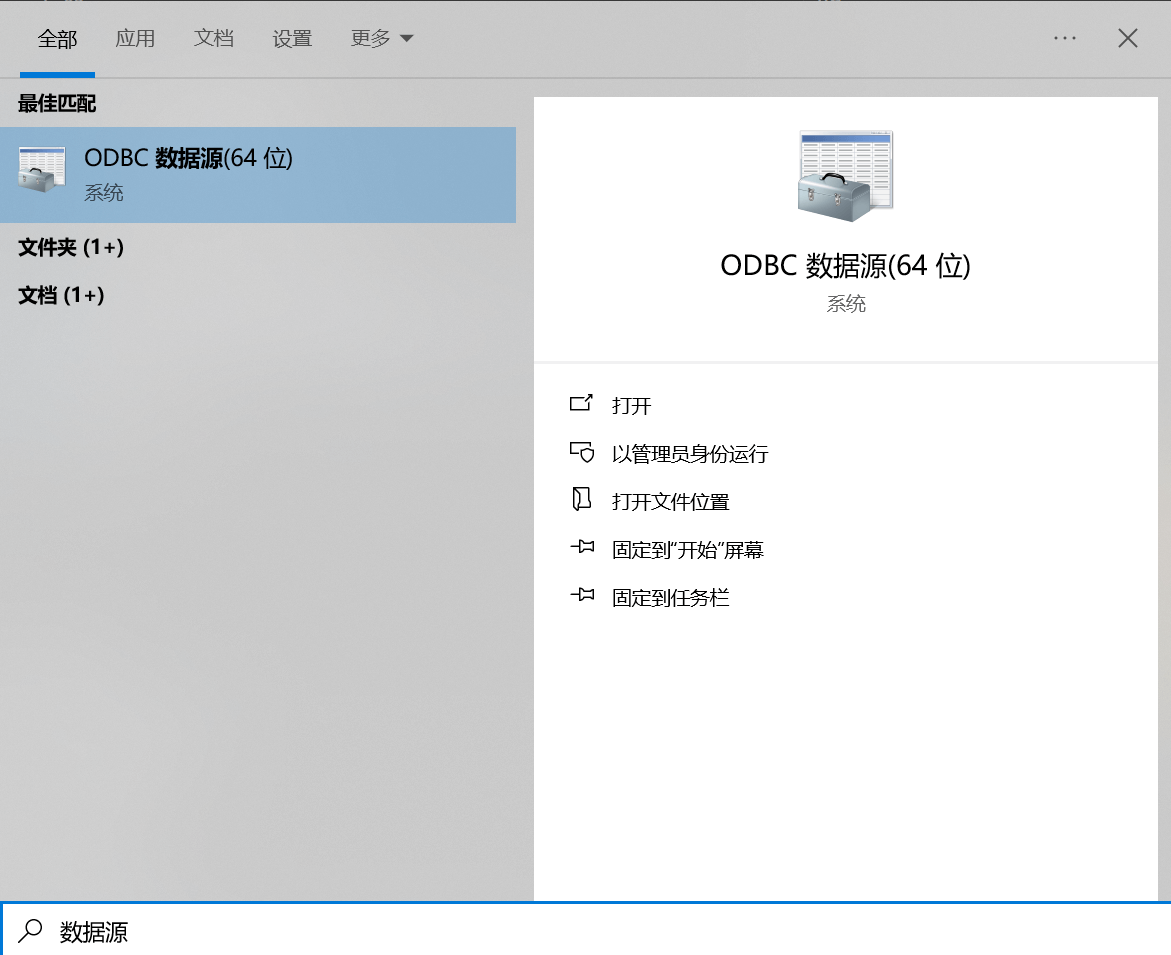
但是从企业和团队视角来看,统一的元器件信息库是至关重要的,这样设计过程、生产过程、销售过程才能保持一致性和连贯性,也更有利于物料进、销、存的管理。Altium Designer的数据库类型元件库是基于ODBC的,ODBC(Open Database Connectivity)是一种开放性的数据库连接接口,它允许应用程序通过统一的方式访问和操作各种类型的数据库。它使得元件的选择、采购和替代变得更加简
hexo支持很多部署方案,最直接的就是部署在GitHub Pages服务上,国内gitee、coding等代码托管平台也都支持静态网站服务,而且免费。但是GitHub在国内访问不太稳定,国内的代码托管平台资源和服务也不太稳定,后来想了想,干脆通过云存储部署吧。云存储有很多选择,而且新用户往往都有很多优惠包,甚至免费额度,有很多人都选择七牛云做图床,就是七牛云的免费额度真是良心,小站基本够用。看完几
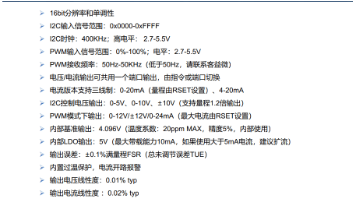
摘要:作者针对现有模拟量输出设备存在的便携性差、远程控制难、精度与价格矛盾等问题,设计了一款基于GP8630N芯片的USB供电小型模拟量输出模块。该模块采用隔离设计,支持4-20mA和±10V输出,通过PWM控制实现0.02%的高精度,成本不足15元。其创新点在于:1)单芯片集成电压/电流输出;2)USB直连供电;3)光耦隔离抗干扰;4)上位机远程控制。成品尺寸仅手掌大小,解决了传统设备笨重、需现
随着毫米波雷达价格下降,作者在二手市场淘到几个24GHz毫米波雷达模块,采用矽典微S3KM111L芯片。该芯片采用1T1R架构,支持FMCW技术,可实现测距测速功能,适用于智能家居、安防监控等场景。文章介绍了芯片特性、FMCW原理及典型应用,并提到模块附带不明型号MCU。最后作者表示玩不动了,愿意付邮送模块分享给感兴趣的朋友。
本文介绍了利用CH347芯片的USB转JTAG/SWD功能结合开源工具OpenOCD实现STM32和FPGA固件下载的方法。详细解析了OpenOCD的多架构支持特性及CH347芯片的多接口转换功能,包括JTAG/SWD接口。提供了Windows和Linux系统下OpenOCD的编译安装指南,并以STM32F1为例演示固件烧写步骤,包括配置准备和烧录命令。文中还给出FPGA烧写的参考链接,并强调了硬
摘要:CH347是一款国产高性能USB转接芯片,支持JTAG/SWD调试功能,适用于STM32等单片机的程序下载与在线调试。文章详细介绍了CH347的硬件特性、驱动安装、STM32CubeIDE配置以及OpenOCD调试环境的搭建方法。通过JTAG/SWD四线或SWD两线连接方式,配合专用驱动和修改后的OpenOCD工具,可实现高速程序下载与在线调试功能(调试速度可达4000kHz)。文中还提供了
摘要:CH347是一款国产高性能USB转接芯片,支持JTAG/SWD调试功能,适用于STM32等单片机的程序下载与在线调试。文章详细介绍了CH347的硬件特性、驱动安装、STM32CubeIDE配置以及OpenOCD调试环境的搭建方法。通过JTAG/SWD四线或SWD两线连接方式,配合专用驱动和修改后的OpenOCD工具,可实现高速程序下载与在线调试功能(调试速度可达4000kHz)。文中还提供了