- @MinimalControl
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文研究了泵控式电液主动悬架系统的分层控制方法。系统通过电液泵驱动液体流动产生主动力,相比传统被动悬架具有更好的控制性能。研究内容包括:1)液压作动器滑模控制设计与仿真验证;2)基于7自由度整车模型的LQR最优控制与自抗扰控制器(LESO)设计;3)扰动前馈补偿策略开发。仿真结果表明,所提出的分层控制方案能有效抑制车身垂向、俯仰和侧倾运动,控制性能显著优于被动悬架系统。文章提供了完整的Simuli
车身高度传感器外形大致如下所示,本质上就是一个角度传感器,接插件中有电源、地和链接ECU的信号线,给ECU输出PWM波。高度传感器在车上的安装位置如下图所示,一般安装在悬架摆臂与车身之间,配置有空簧和CDC的车辆,一般四个悬架都会标配安装有4个高度传感器。

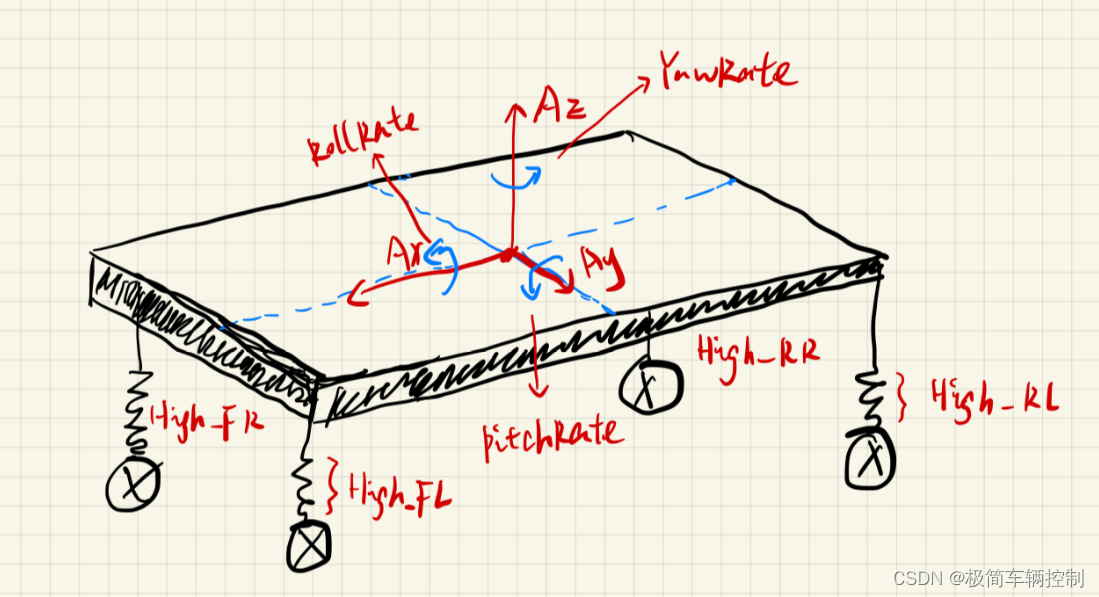
只要想运用天棚控制算法来提高平顺性,避免不了需要知道车的四个车轮位置的减振器压缩速度,记为Vd和对应的车身速度垂跳速度,记为Vs;车身垂跳速度:由IMU垂向加速度结合三轴角速度,分解得到车四个角的垂向加速度和垂向速度;车身垂跳速度:由IMU垂向加速度结合三轴角速度,分解得到车四个角的垂向加速度和垂向速度;减振器压缩速度:由估算的车身垂向速度与采集的车轮垂向加速度计算得到;3、侧倾控制:侧倾角或侧倾
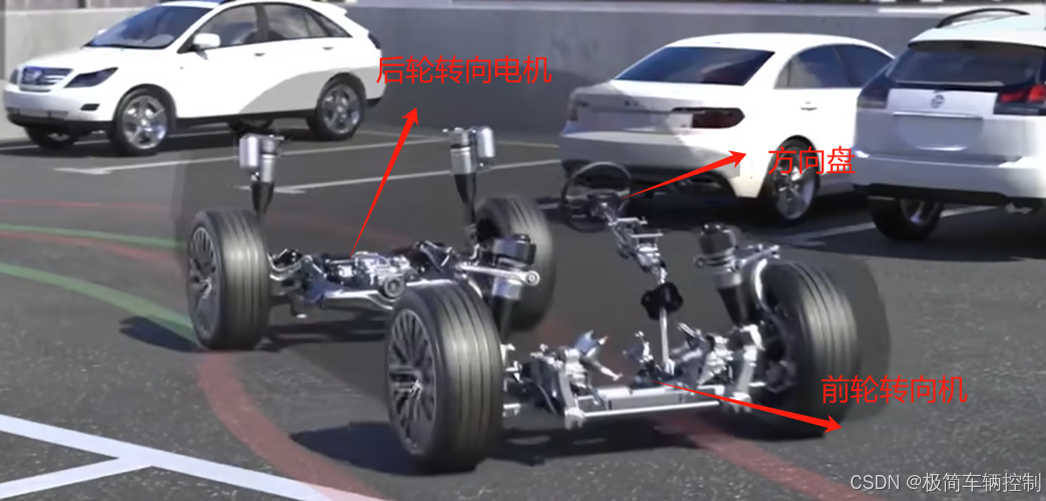
顾名思义,四轮转向指的是四个轮子都能转向,都能转动。当驾驶员操作方向盘进行前轮转向时,后轮按照特定算法给出的转角跟着转动。电气化时代,为了能实现后轮转向,通常是在后轴上也安装一套转向电机,前轮转向和后轮转向电机通过一个控制器协同控制。正常情况下,前轮转角最大能达40°,而后轮转向后轮转角最大10°左右,转向上后轮是辅助。二、四轮转向的好处1、低速转弯时可以减少转弯半径在低速时,后轮转向处于反向模式
开篇的一点说明,之前博客说运动解算按照3个车身加速度+4个高度传感器的方案来做,最近又看了一些讲座介绍,说考虑成本,更加倾向于六轴IMU+4个高度传感器的方案,因此,本篇博客便以六轴IMU+4个高度传感器的方案来介绍。
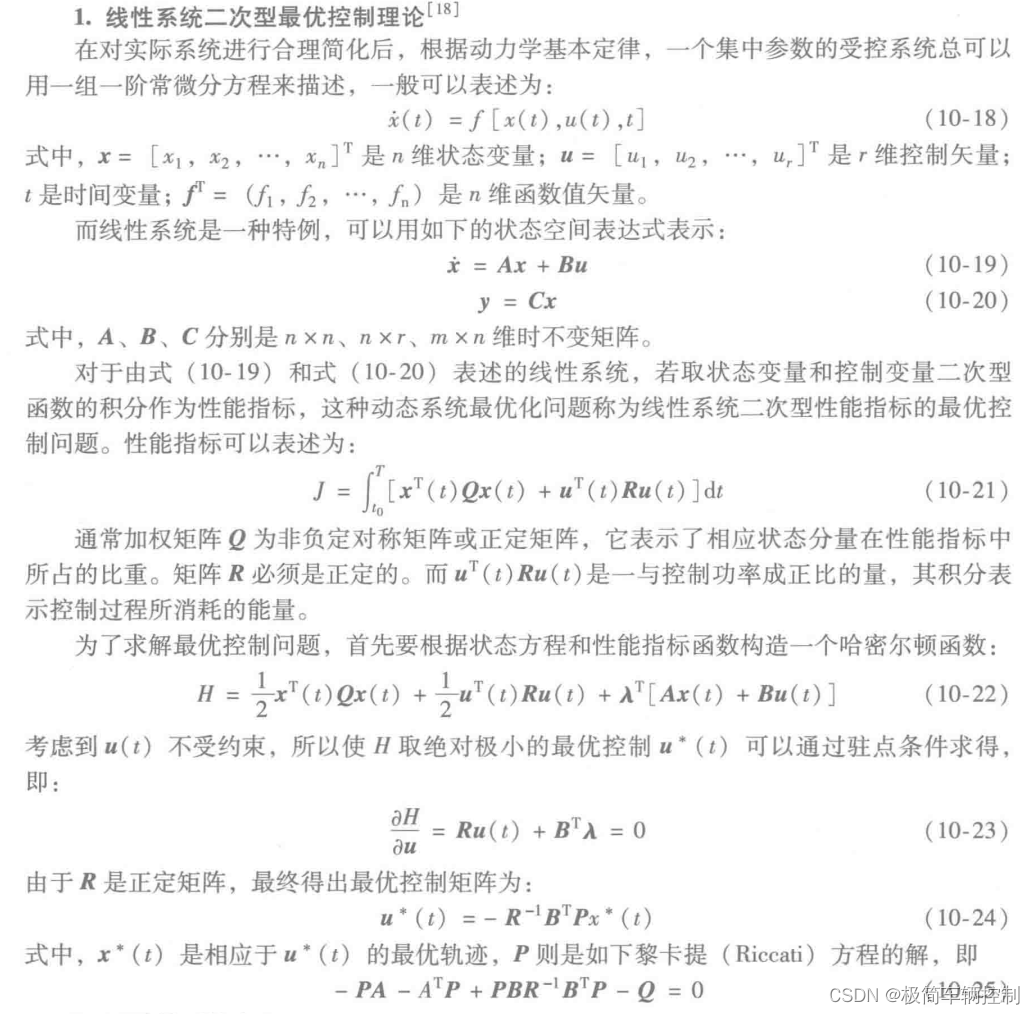
LQG本质上还是LQR和状态反馈,大家可以先看看上面这篇博客。LQG:随机线性最优控制系统,应用随机线性最优控制理论,对系统有几点要求:1)受控对象是线性的(Linear);2)系统的性能指标要以二次型的形式表达(Quadratic);3) 系统输入为高斯分布的白噪声(Gaussian distributed white noise);4) 系统的状态均为可测。
有了状态方程,通过以下matlab脚本,可以转化为传递函数。
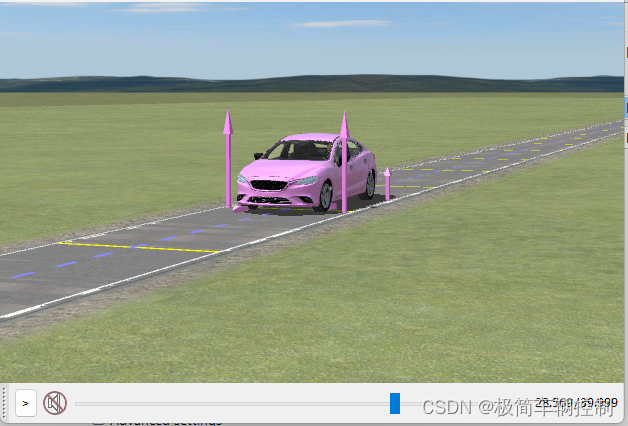
从0开始加速--匀速40Km/h--减速至0;:在道路65m~70m之间,有一个转向变道再回来的避障动作。C级路面,300m处,设置高30mm的减速带。
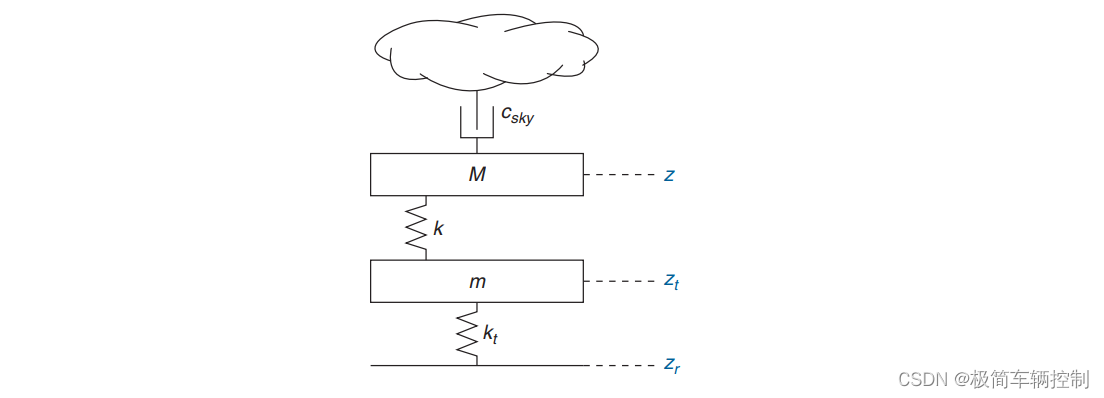
天棚控制算法思想最早是由一个外国人Karnopp在1974年最早提出来的,为了有效减轻路面颠簸对车身的影响,为了最大程度将车身与路面解耦,他设想有一个减振器,直接一端链接天空,另一端链接车身;这个减振器的阻尼力方向与车身运动方向相反,恰好能使得车身保持在水平位置不动;这样,就算路面再怎么颠簸,都不会影响到车身,如下图所示:按照他的设想,四分之一车悬架动力学模型就变成下面这样子;当然,这个设想是理想
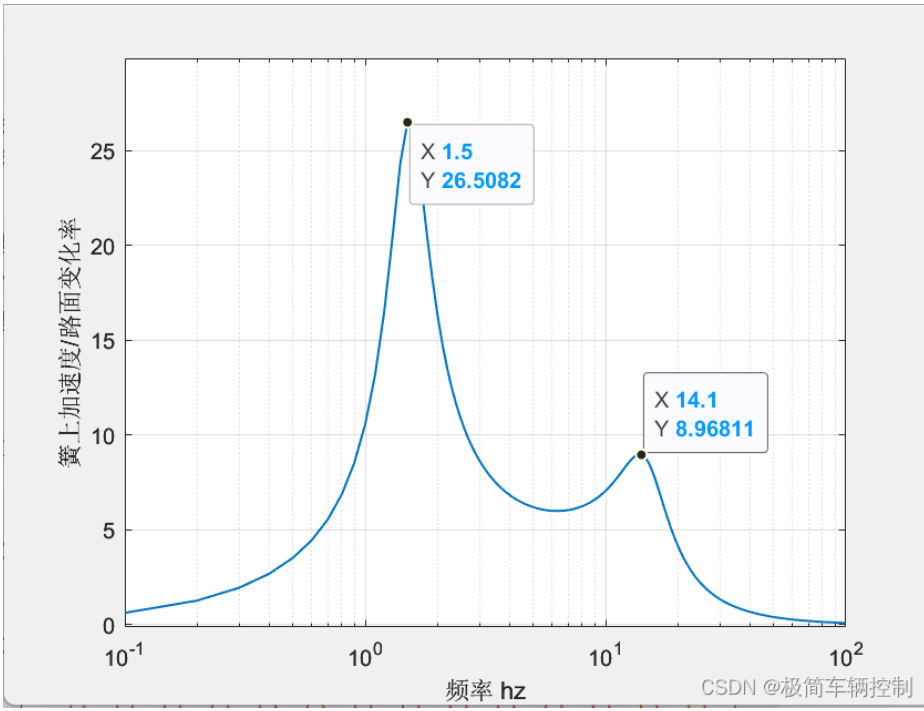
路面建模、悬架建模、时域频域分析