- @MhNHJesogA
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本系统是一套运行于MATLAB环境下的说话人识别解决方案,核心采用梅尔频率倒谱系数(MFCC)进行语音特征提取,结合高斯混合模型(GMM)实现说话人身份建模与匹配,最终完成“多选一”式说话人辨认任务。系统遵循“数据预处理-特征提取-模型训练-识别匹配”的经典机器学习流程,支持多说话人语音数据的批量处理,可输出可视化的特征图谱与量化的识别正确率,适用于语音识别技术研究、生物认证原型开发等场景。Mat
1,扩展卡尔曼滤波。道路坡度估计算法,使用Simulink模型搭建,已经在实际道路上测试使用。主要程序执行流程:1) 获取陀螺仪和加速度采集的实时动态信息2) 初始化用来校正传感器3) 通过预处理对信号进行滤波,消除大部分错误和失真的信号4) 主处理动态调整加权因数、利用角速度校正加速度等方法,得到最优的坡度估计5) 通过 CAN 总线将估计的坡度信号传递给整车其他电控单元。
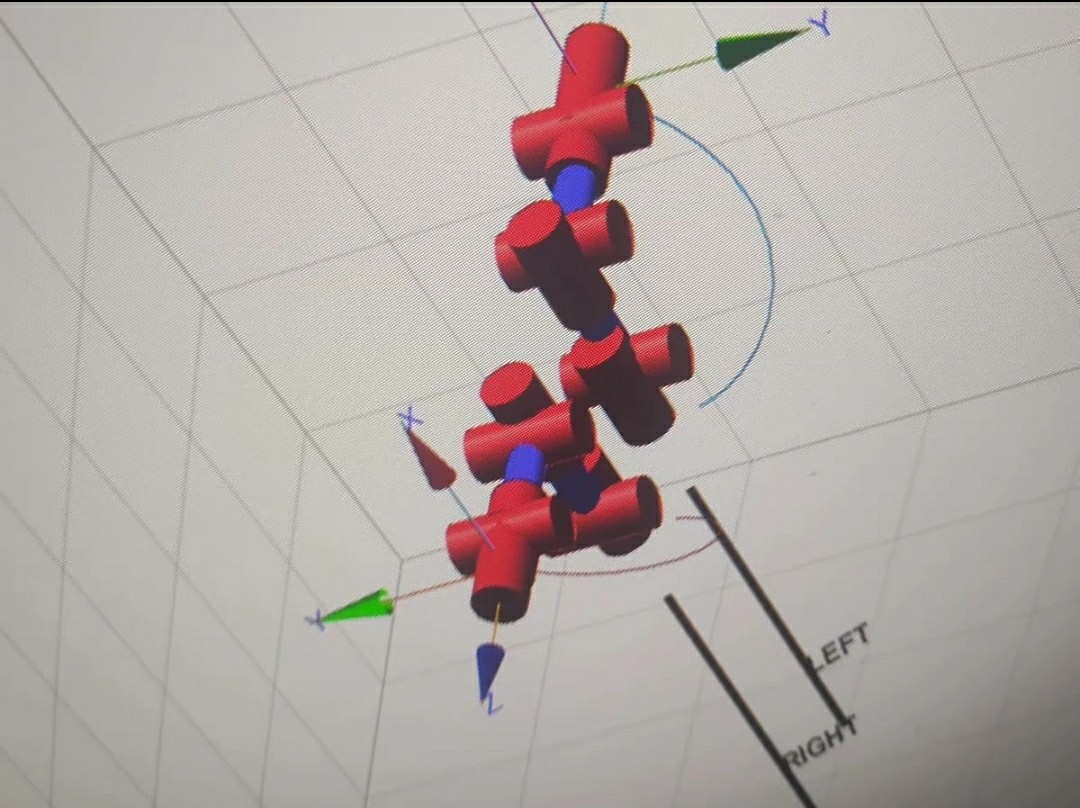
打开Matlab敲下第10086行机械臂仿真代码,突然发现让两个铁胳膊和谐共舞可比教人类小朋友握手难多了。今天就唠唠怎么用Matlab让双机械臂画出完美轨迹,重点看黄色告警灯代码怎么变成丝滑轨迹的秘密。调完这些发现,想让机械臂轨迹像德芙一样丝滑,关键不在算法多牛逼,而是要把关节限制、同步误差这些脏数据处理干净。jtraj生成的轨迹虽然平滑,但双机械臂时间同步得靠mstraj来搞基。双臂机器人mat
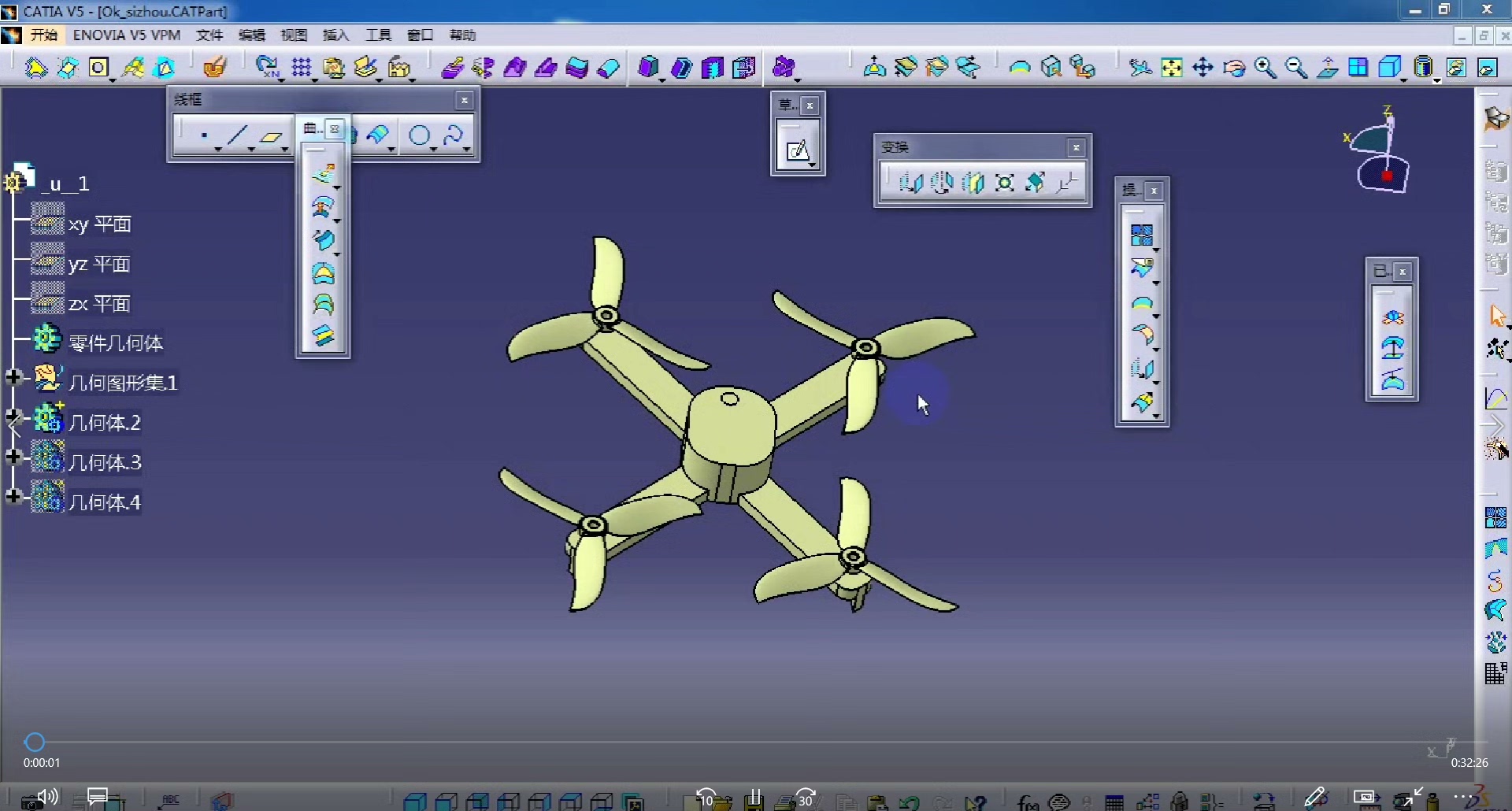
滑移网格主要用于处理相对运动的部件,在多旋翼无人机的场景下,旋翼与机身存在相对转动,滑移网格就派上用场啦。在瞬态问题模拟中,它能够捕捉到不同时刻因为旋翼转动带来的流场变化。
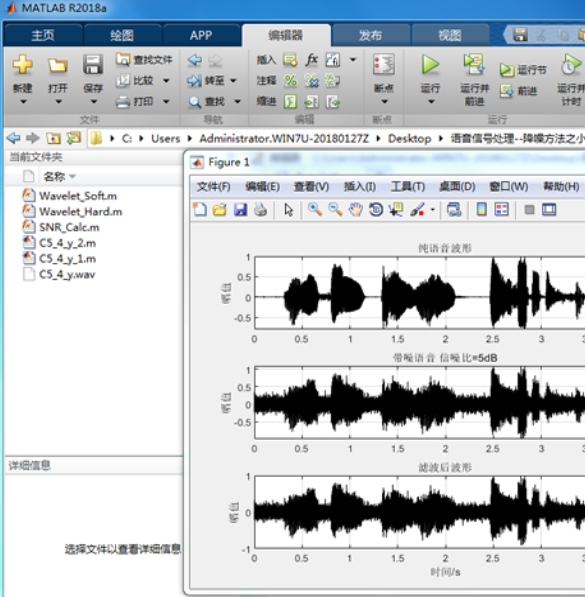
这里得唠唠返回值:C是所有小波系数的拼接数组,L是个长度为分解层数+2的数组,前3个是各层细节系数的长度,最后一个是近似系数的长度。分解后,最低层的近似系数是语音的主体低频成分(人声基频就在这),而d1、d2、d3这三层细节系数里,大部分都是噪音的高频成分——毕竟人声的高频细节没那么多,噪音却在高频区瞎晃。亲测下来,这套流程对付日常的环境白噪音效果拉满,要是遇到非平稳噪音(比如汽车喇叭、脚步声),
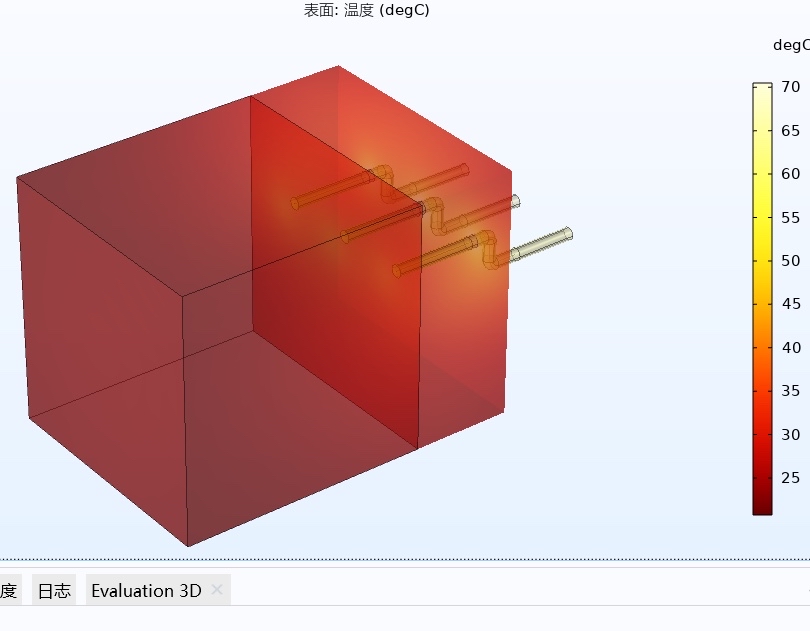
一开始我以为就是搭个电磁场加传热场就行,结果刚上手就踩了好几个坑——先是想把断路器的弹簧、外壳、绝缘垫全复刻出来,结果模型跑了一晚上都没出结果,师兄赶紧拦着我说:“要啥自行车,留铜排、触头、空气域和绝缘层就行,简化到能看出发热趋势就够”。网格划分也是个磨人的环节,默认网格太粗,触头接触点的电流集中、温度梯度大,粗网格跑出来的结果直接跳变,后来我给触头接触面加了边界层网格,又把铜排的网格细化了一倍,
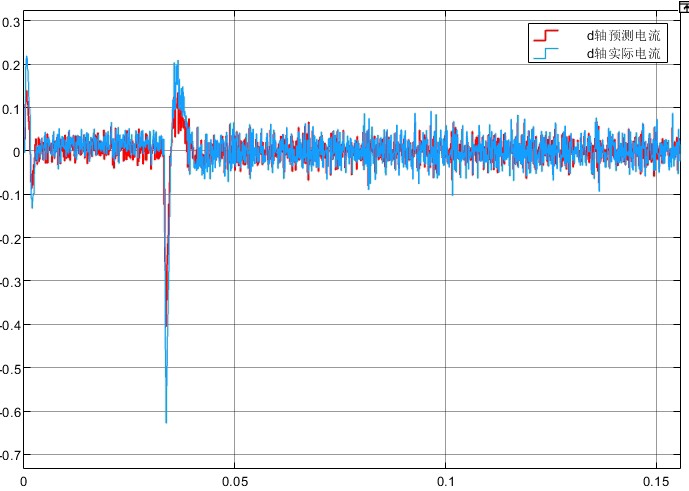
基于电感参数扰动补偿的增量式预测电流控制-pmsm,实现无超调快速电流控制。(1) 增量式预测控制对磁链参数变化具有鲁棒性,多步预测对扰动,延时具有鲁棒性。(2) 相电压重构,保证观测器设计的有效。(3) ESO设计,保证预测控制对电感参数具有鲁棒性。在电机控制领域,永磁同步电机(PMSM)的高效精准控制一直是研究的热点。今天咱就来唠唠基于电感参数扰动补偿的增量式预测电流控制,这可是实现无超调快速
本程序包实现了一套完整的弧齿锥齿轮齿面接触分析(TCA)系统,主要用于分析大轮凸面与小轮凹面的啮合特性。程序由刘万春博士开发,采用MATLAB语言编写,涵盖了从参数输入、齿面计算到结果可视化的完整分析流程。
本系统是一套基于C++与OpenCV开发的光学相位测量系统,实现了两种高精度相位测量算法——格雷码结合相移法和三频外差法。通过生成特定模式的条纹图像并进行相位解码,可获取物体表面的绝对相位信息,为三维形貌测量等应用提供核心技术支持。格雷码,外差基于c++版本相位编码与解码GrayCoding 类 为相移+格雷码的编码与解码程序MultiFrequency 类 为三频外差的编码与解码程序Main为运
【matlab】基于改进遗传算法的资源调度问题matlab编写的基于改进遗传算法的资源调度问题,复现论文《改进遗传算法求解农业水资源调度问题》,代码纯手写,可直接运行,运行结果如图所示,代码注释详细,可直接更改应用与同类问题。在处理资源调度相关问题时,遗传算法凭借其独特的搜索机制常常能带来不错的解决方案。今天咱们就聊聊基于Matlab实现的改进遗传算法来处理资源调度问题,这可是复现了《改进遗传算法