- @JHCtUUQk
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
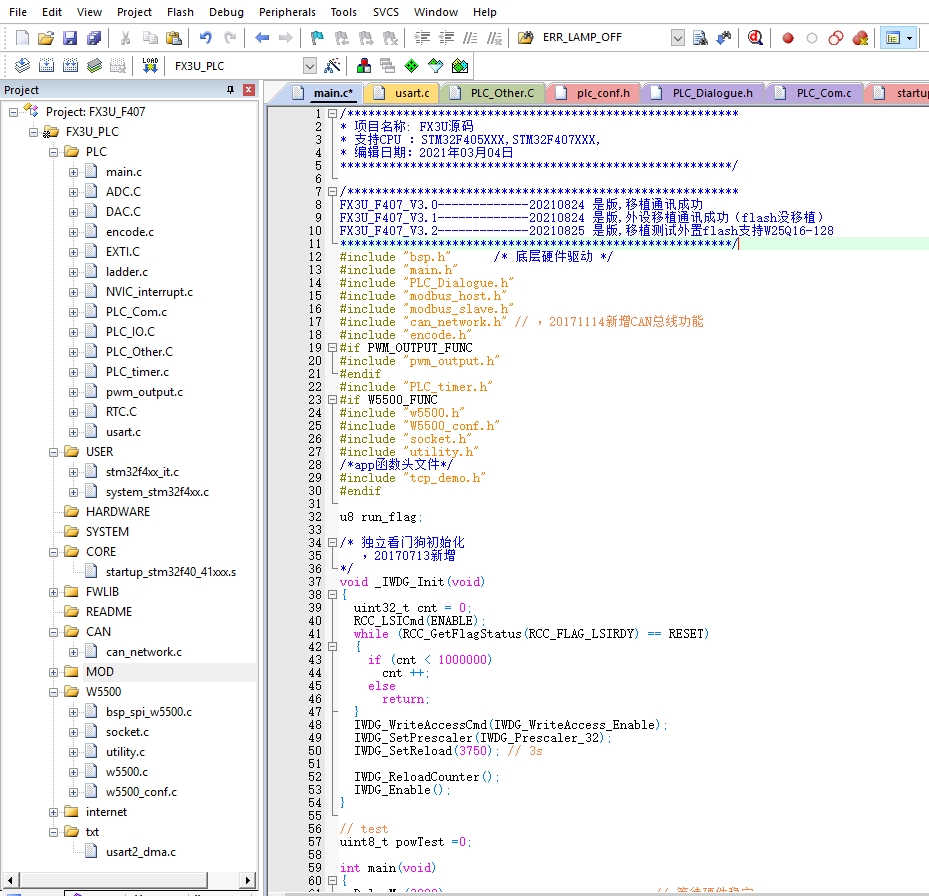
但要是做量产项目,还是得找原作者搞标准库当面交易——别问我怎么知道的,去年有个项目用了网传的Hal版,结果现场出现随机死机,后来发现是DMA缓存溢出没处理干净。最近在工控圈子里看到几个老哥在倒腾STM32F4系列的工控板源码,正好手头有个项目用到了STM32F407+FX3U的方案,这玩意儿搞过的人都知道,掉电数据保存是刚需。最后提醒下,源码里的PLC通信协议栈用了魔改版的三菱协议,想自己移植的话
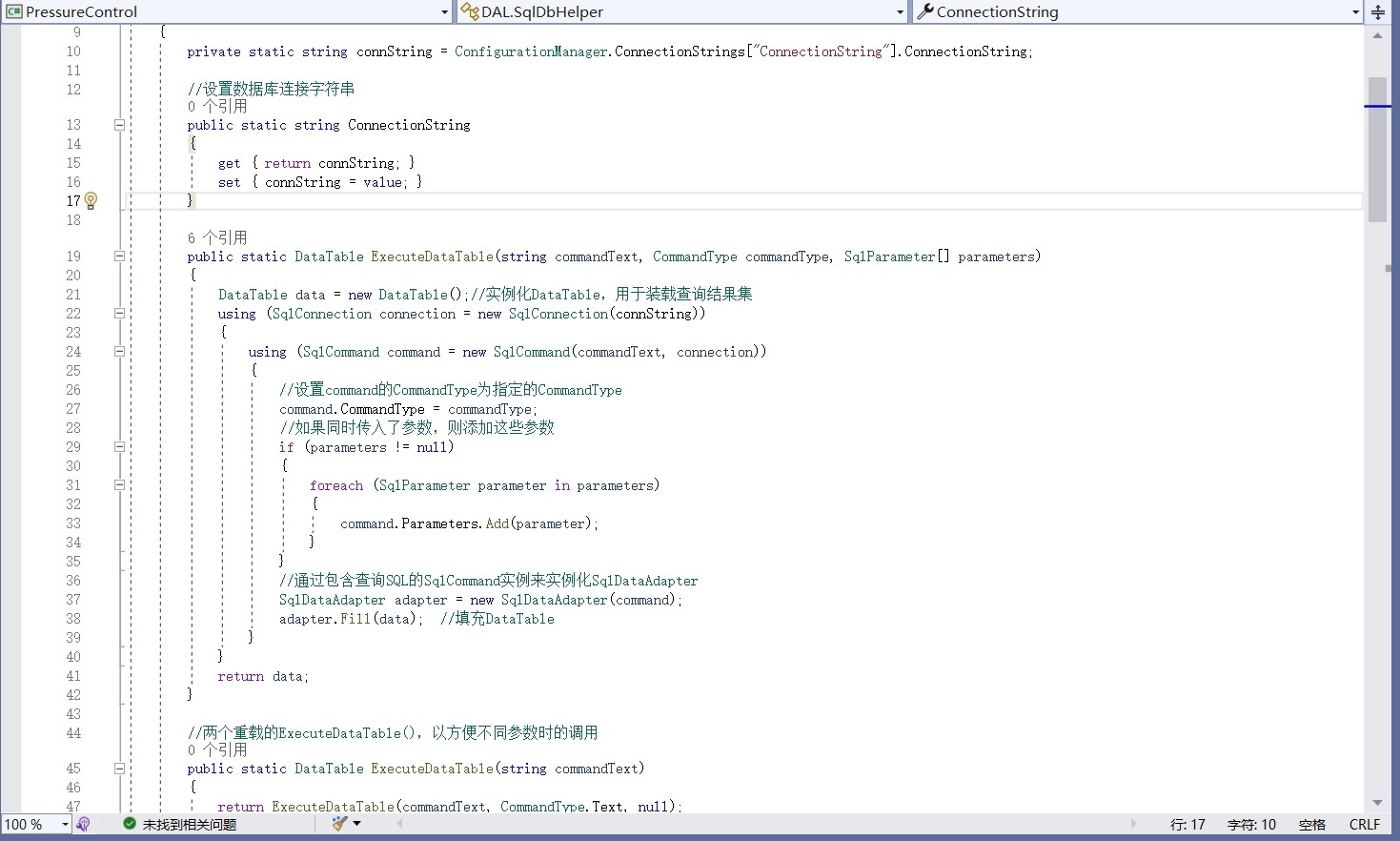
最近在折腾一个工业控制项目,偶然发现一套挺有意思的C#上位机框架。这玩意儿用WinForm搞得有模有样,界面看着比大多数工控软件顺眼多了。要说改进建议,可以加个插件系统。源码里那些自定义控件直接扒下来用在自己的项目里也挺香,比用WPF省事多了。这比用PictureBox模拟阴影优雅多了,系统级的效果还不吃性能。这种架构扩展性拉满,想加个TCP通信只要再继承个类就行,完全不用动现有代码。C#上位机框
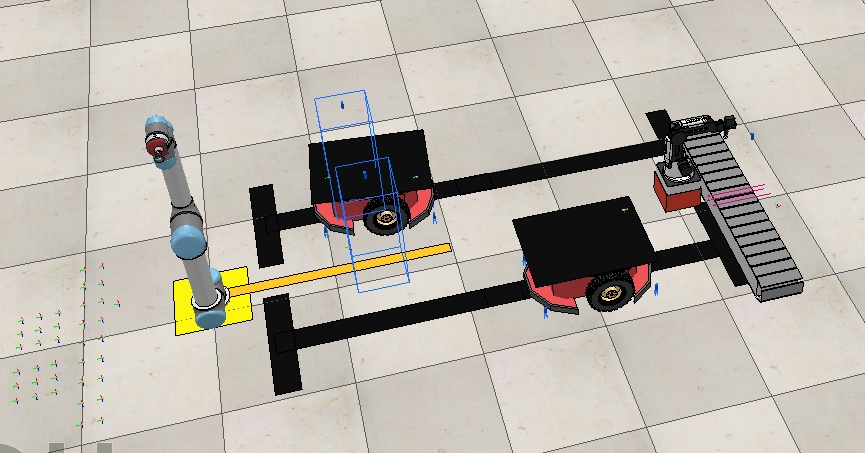
尤其是那个根据物体高度和颜色动态调整码垛顺序的需求,差点把我CPU干烧了——矮的物体必须放在最高层,还要分颜色归类,这逻辑可比普通码垛复杂三倍不止。这段代码的骚操作在于把高度和颜色属性绑定——高于0.15米的自动标为红色,矮的标蓝色。Coppeliasim仿真,vrep仿真,有分拣机器人,寻迹小车,码垛机器人,履带随机产生物块,区分高低颜色进行码垛,矮的放在最高层。Coppeliasim仿真,vr
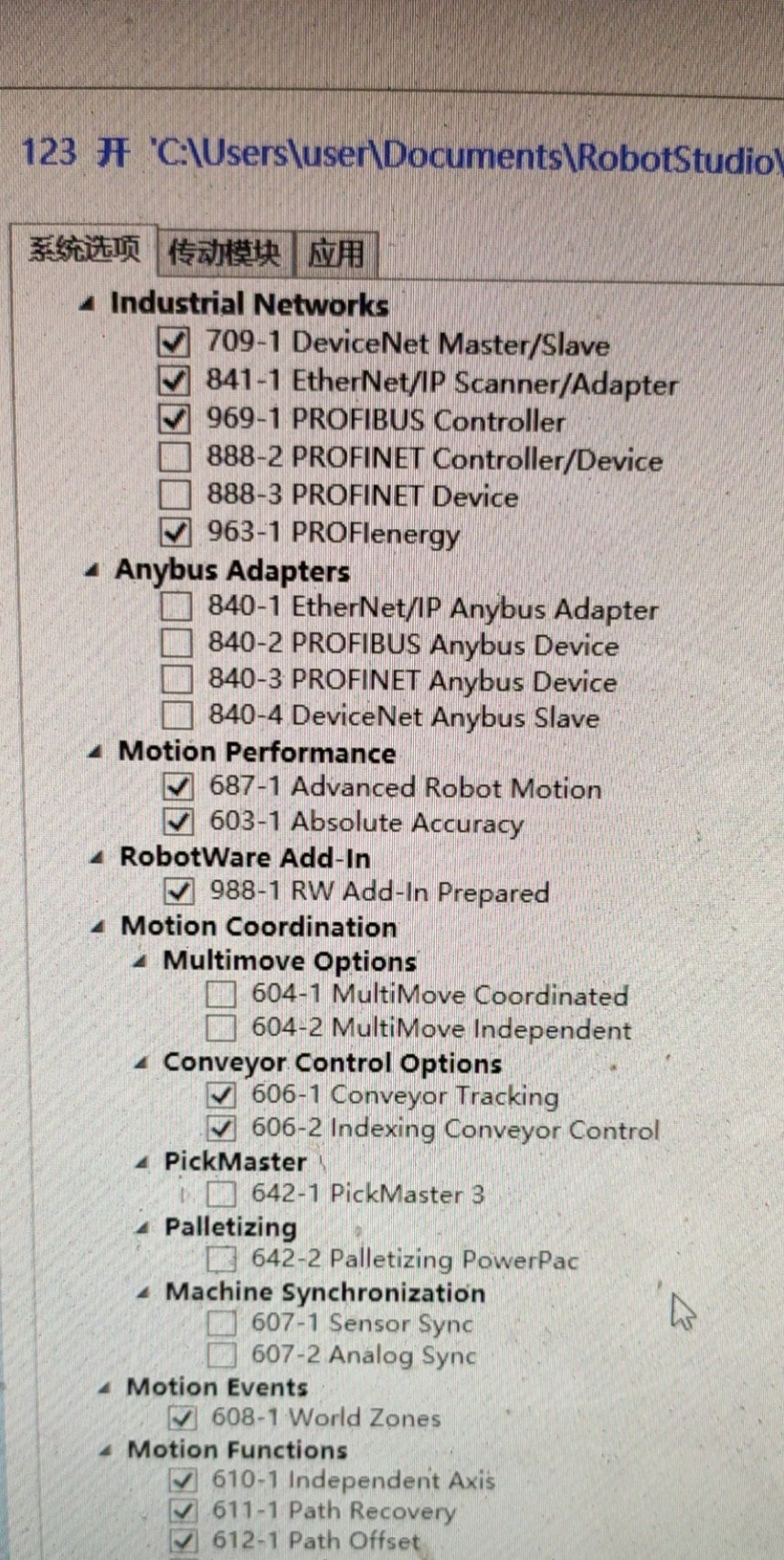
重点来了,系统时间必须和密钥有效期匹配,我上次就栽在这儿,机器时间调回2018年才读出来,你懂的。搞过工业机器人的兄弟应该都懂,ABB的选项包就跟游戏里的DLC似的,没解锁的话高级功能全灰。今天咱们唠点硬核的,手把手教你三种激活大法——物理密钥、虚拟机巧、还有直接写密钥的骚操作。ABB机器人选项包,密钥,三种方法,真实、虚拟、密钥三种方法,有教程、有软件、也有密钥。ABB机器人选项包,密钥,三种方
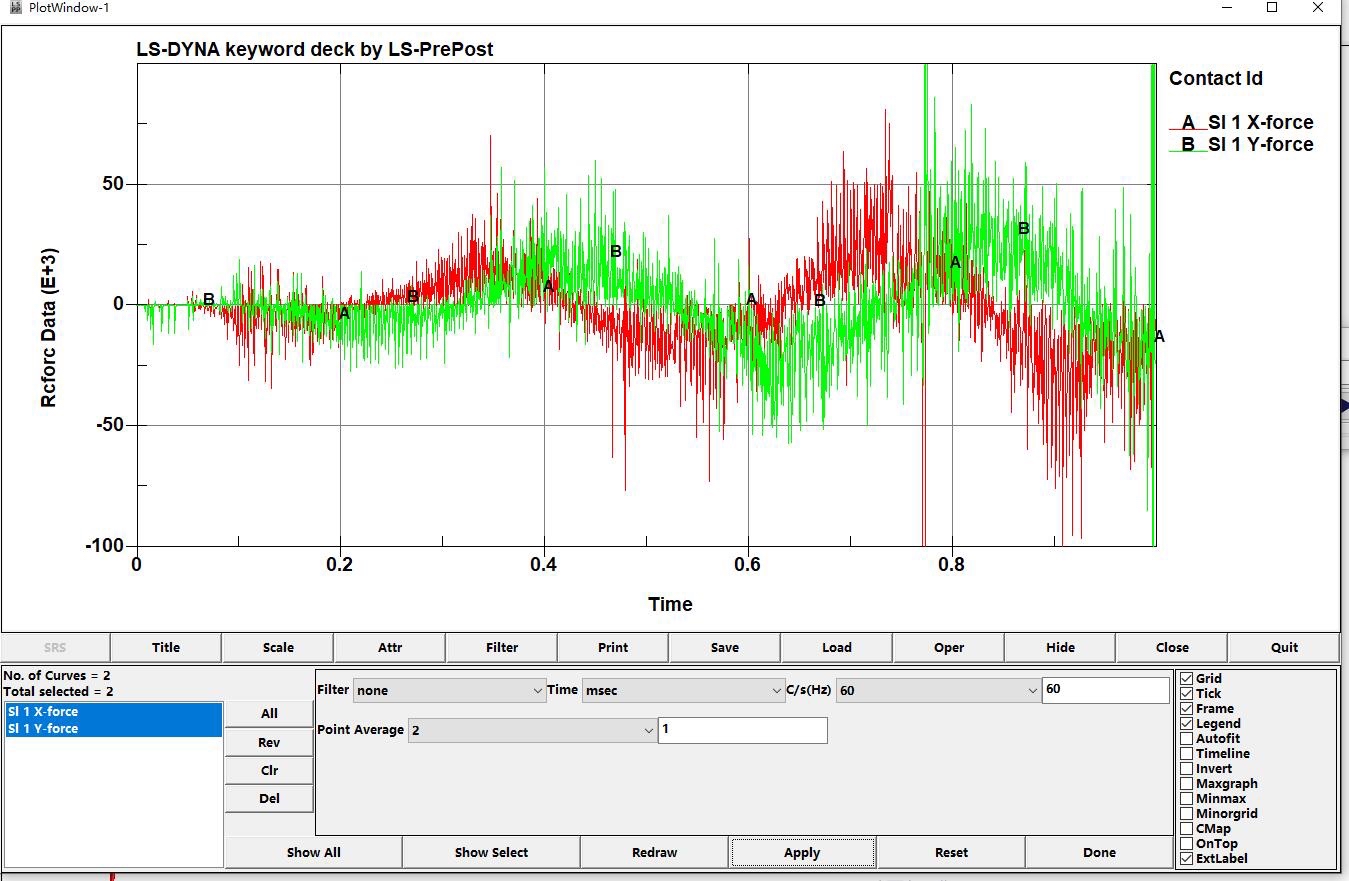
ansys/lsdyna切削,旋转切削,完全重启动,热力耦合在工程模拟领域,ANSYS/LSDYNA是一款强大的工具,尤其在切削模拟方面有着出色的表现。今天咱们就来唠唠ANSYS/LSDYNA里的旋转切削、完全重启动以及热力耦合这些有趣又实用的功能。
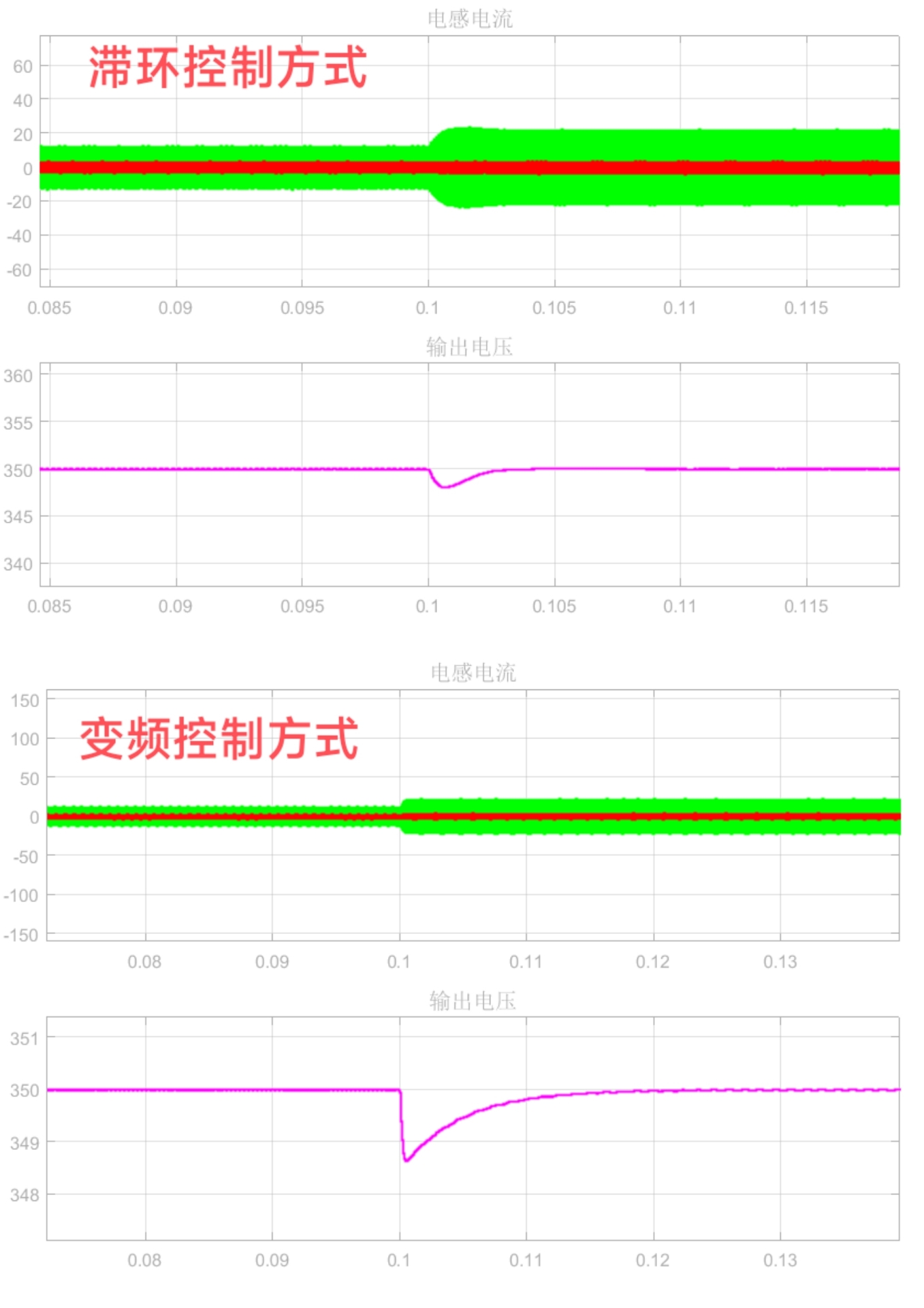
后来在PLECS里复现时发现,滞环控制的这种特性其实是通过频率突变实现的强制箝位——当电压接近目标值时直接跳到最高频限制电流增长。0.1秒负载突降瞬间,滞环控制的输出电压只跌了0.8V(目标24V),而变频控制组跌了1.5V。更意外的是恢复时间——滞环组在3ms内就稳定了,变频组花了将近10ms。滞环控制和变频控制下的电感电流和输出电压波形图如第二幅图所示 ,在图中0.1s处进行了满载到半载的切换
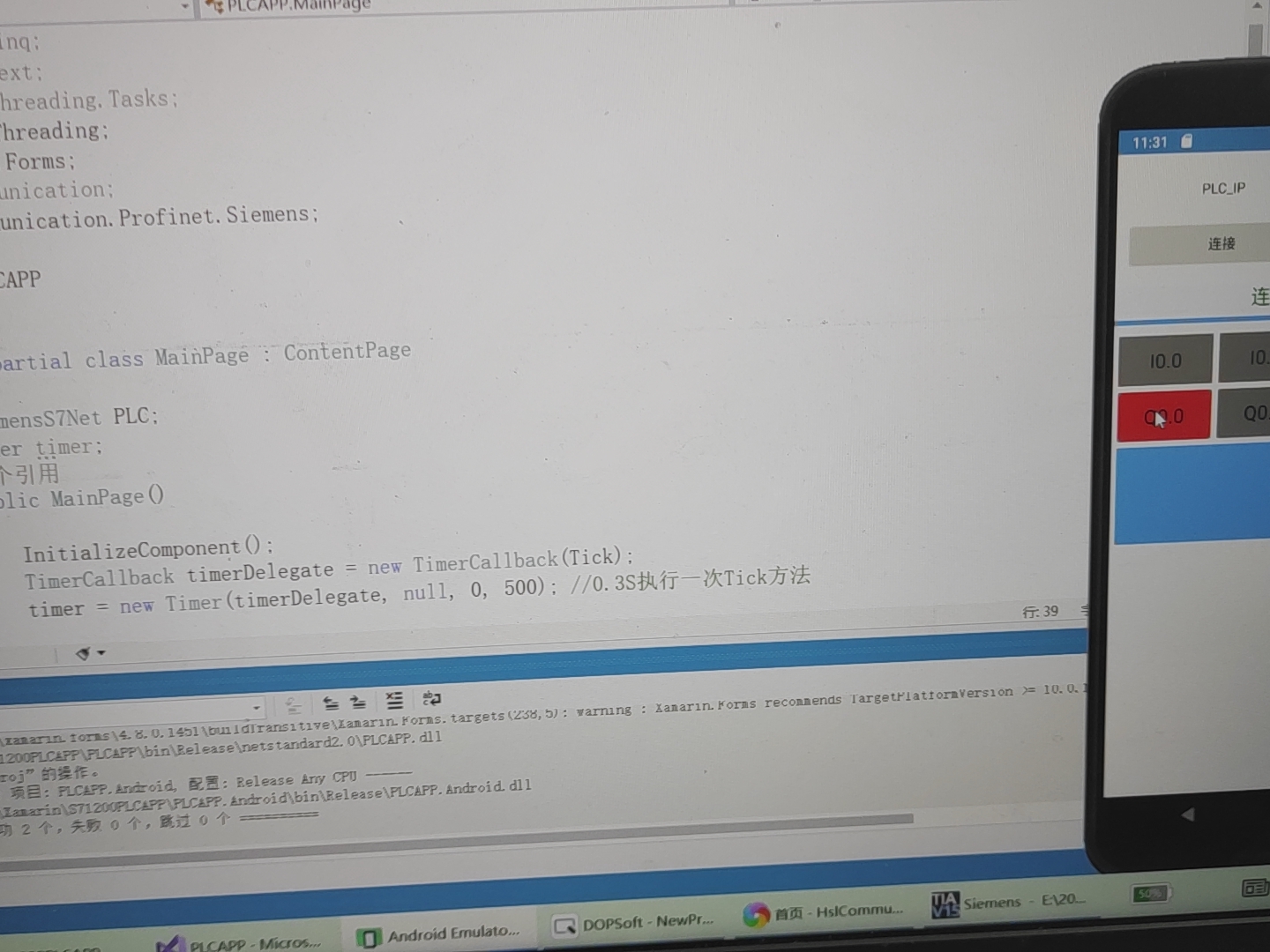
折腾两小时才发现是车间WiFi的DHCP把IP池用完了——PLC的固定IP被路由器分配给了保洁阿姨的智能手机。这段代码里的门道在于CpuType要选对型号,IP地址得和PLC的Profinet配置一致。遇到过最坑的情况是手机WiFi和PLC不在同一网段,那叫一个抓狂。实测发现不同品牌的安卓机对后台服务的限制差异很大,小米得单独设置电池优化白名单,华为要允许应用自启动。先整点硬核的通信代码。1,C#
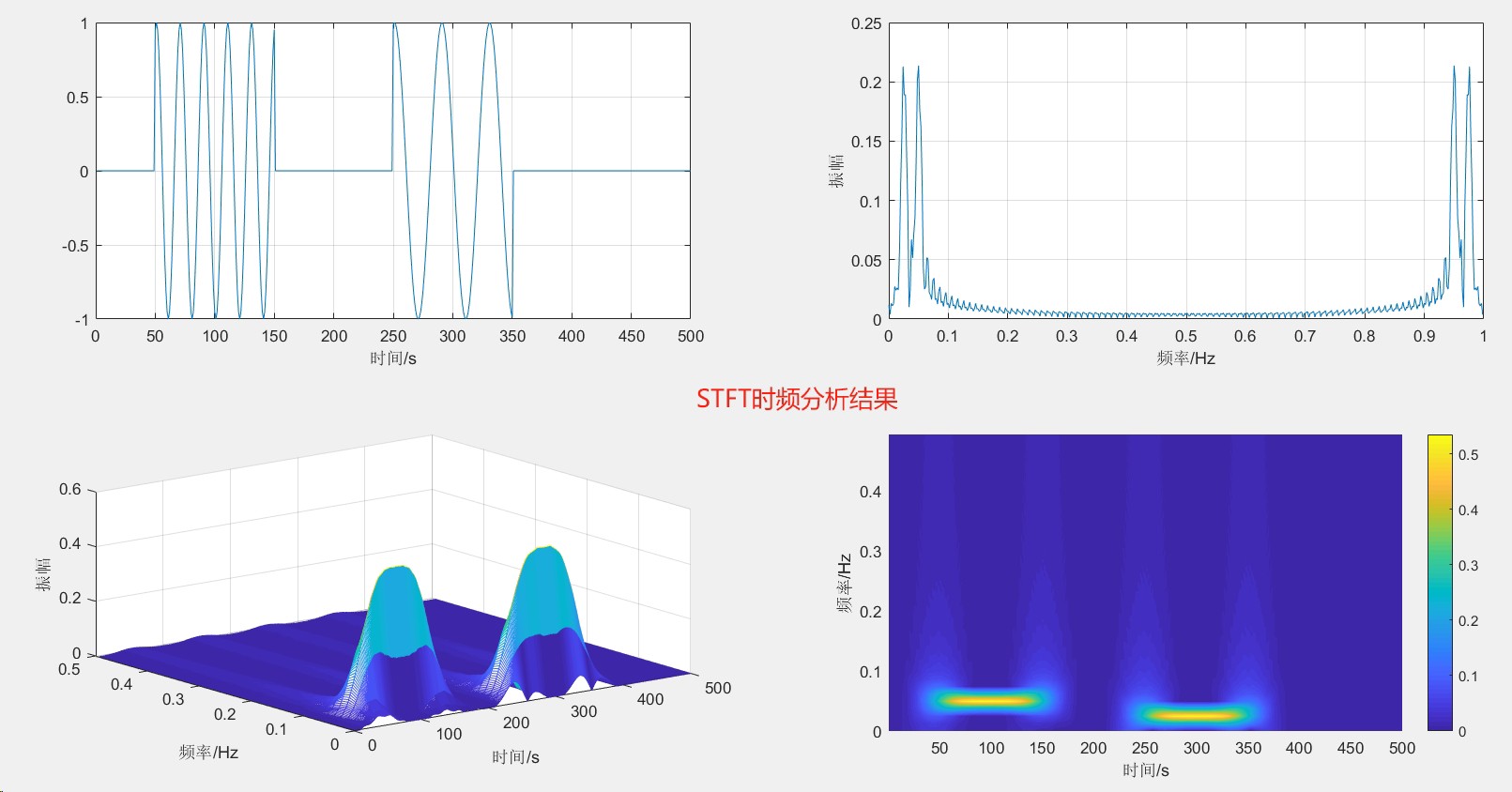
250.基于matlab的5种时频分析方法((短时傅里叶变换)STFT,Gabor展开和小波变换,Wigner-Ville(WVD),伪Wigner-Ville分布(PWVD),平滑伪Wigner-Ville分布(SPWVD),每条程序都有详细的说明,设置仿真信号进行时频输出。程序已调通,可直接运行。在信号处理领域,时频分析是一项至关重要的技术,它能让我们同时观察信号在时间和频率域的特性。
DBN是一种生成式模型,由多个受限玻尔兹曼机(RBM)堆叠而成。每个RBM是一个两层的神经网络,包含可见层和隐藏层。它能够学习数据的内在特征表示,通过无监督的预训练和有监督的微调,提升模型的性能。深度置信网络DBN为数据分类预测提供了一种有效的解决方案,通过无监督预训练和有监督微调相结合的方式,能够处理复杂的多特征数据,并实现高精度的二分类或多分类任务。上述代码展示了一个简单的实现过程,在实际应用
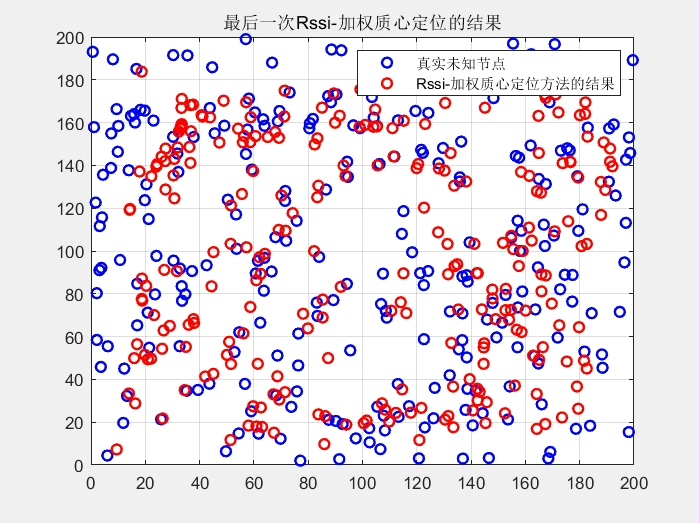
特别是在锚节点分布不均匀时,改进效果更明显——比如当多数锚节点集中在某侧时,原始算法会被"带偏",而加权算法能通过距离评估自动平衡。今天咱们聊聊MATLAB环境下基于RSSI的加权质心定位,这个法子比传统质心法更会"听声辨位"。另外阈值的设置也有讲究,遇到RSSI特别弱的锚节点(比如距离超过20米),可以直接剔除避免引入过大误差。但实际场景中,离目标越近的锚节点测距理应更准,这时候就需要"差别对待