




- @IqfQZrhA
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
遇到最玄学的问题是SPI时钟速率——当主控芯片发热时,过高的SPI速率会导致数据错乱。如果需要更高精度,可以开启AS5048A的DAEC功能(动态角度误差补偿),不过那得改配置寄存器,下回再细说。这里最容易翻车的是数据长度设置——AS5048A的SPI帧是16位的,但很多教程写成8位模式,直接导致数据错位。这里用预先计算好的查找表替代实时计算,既保证速度又避免堆栈溢出(实时计算需要移位操作,在中断
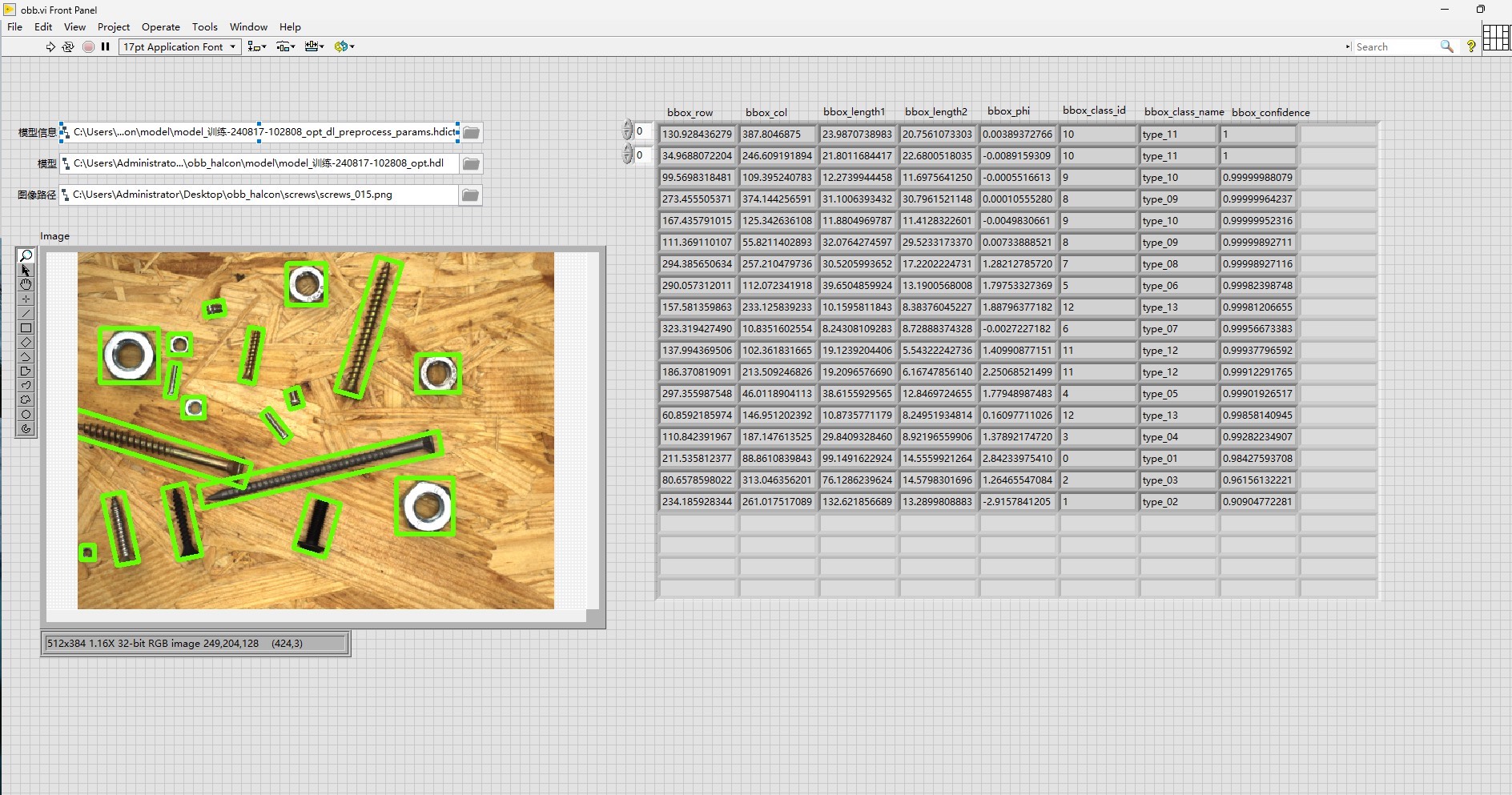
labview调用halcon实现目标检测-obb,源码,labview2018 64位,halcon22.05,里面包含模型和测视集最近在搞目标检测相关项目,发现LabVIEW调用Halcon实现目标检测 - OBB(Oriented Bounding Box,定向边界框)这个组合挺有意思,今天就来跟大家分享一下具体实现过程。咱们用的是LabVIEW 2018 64位版本,搭配Halcon 22
总之,VCU的设计是一个系统工程,硬件、软件、通信、电源管理,样样都得考虑周全。不过,真正的挑战还是在于如何把这些技术整合到一起,打造出一款稳定、可靠、高效的VCU产品。商用车的VCU设计,绝对是一场硬仗,但也正是这种挑战,让汽车电子工程师们乐此不疲。商用车的VCU设计,既要考虑功能的完备性,还得兼顾可靠性和成本。首先,CAN总线是汽车电子通信的“大动脉”,负责VCU与其他模块的数据交换。这款芯片
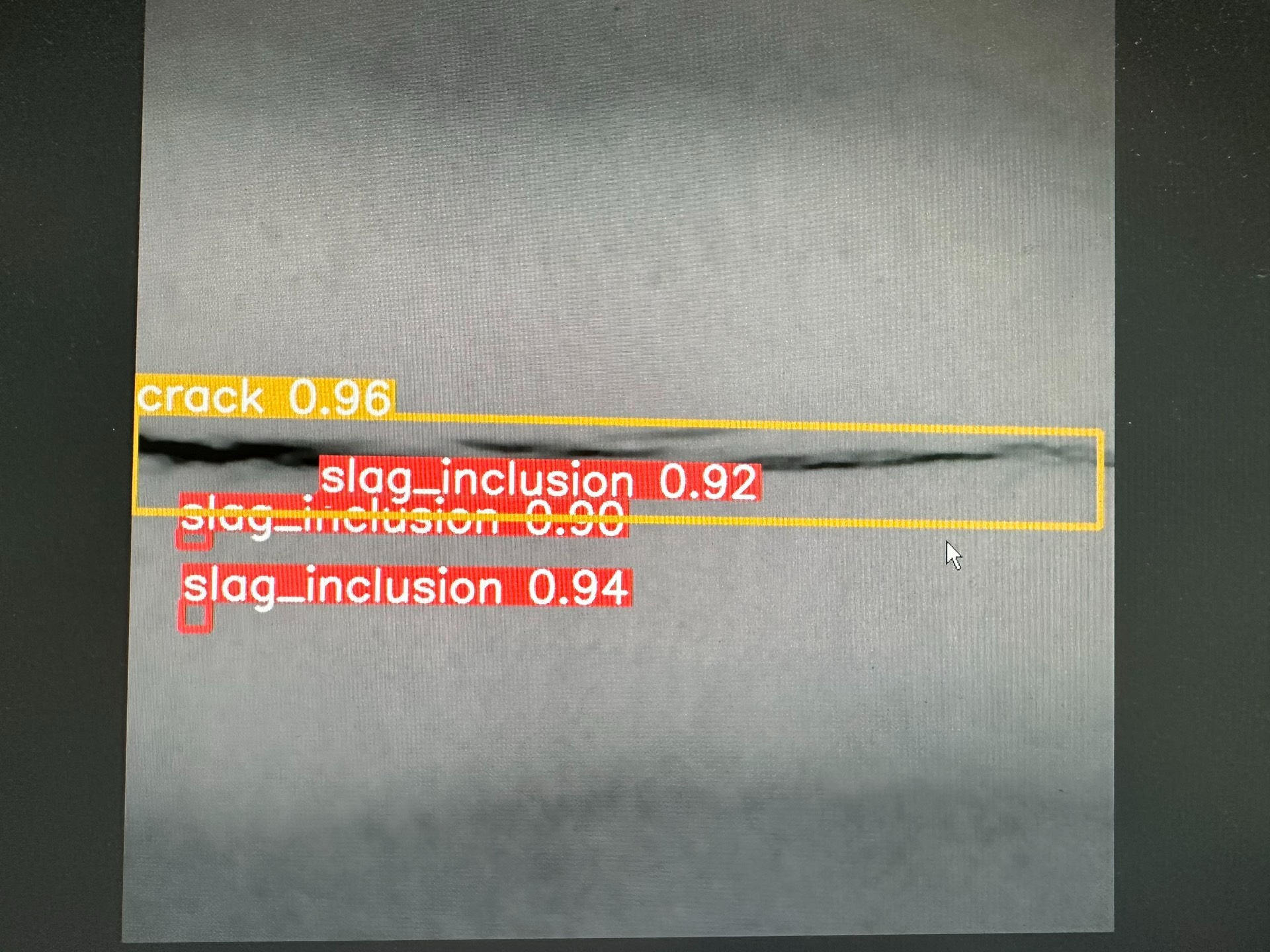
最近折腾了个X射线底片数据集,5232张带VOC格式标注,包含裂纹、气孔、夹渣、未融合四类缺陷。先上段数据增强的骚操作。构建的焊缝缺陷目标检测数据集,扩增5232张,缺陷标注4类,裂纹 气孔 夹渣 未融合/未焊透,VOC格式,处理…构建的焊缝缺陷目标检测数据集,扩增5232张,缺陷标注4类,裂纹 气孔 夹渣 未融合/未焊透,VOC格式,处理…这套组合技重点保留缺陷区域特征,在保持标注框有效性的同时
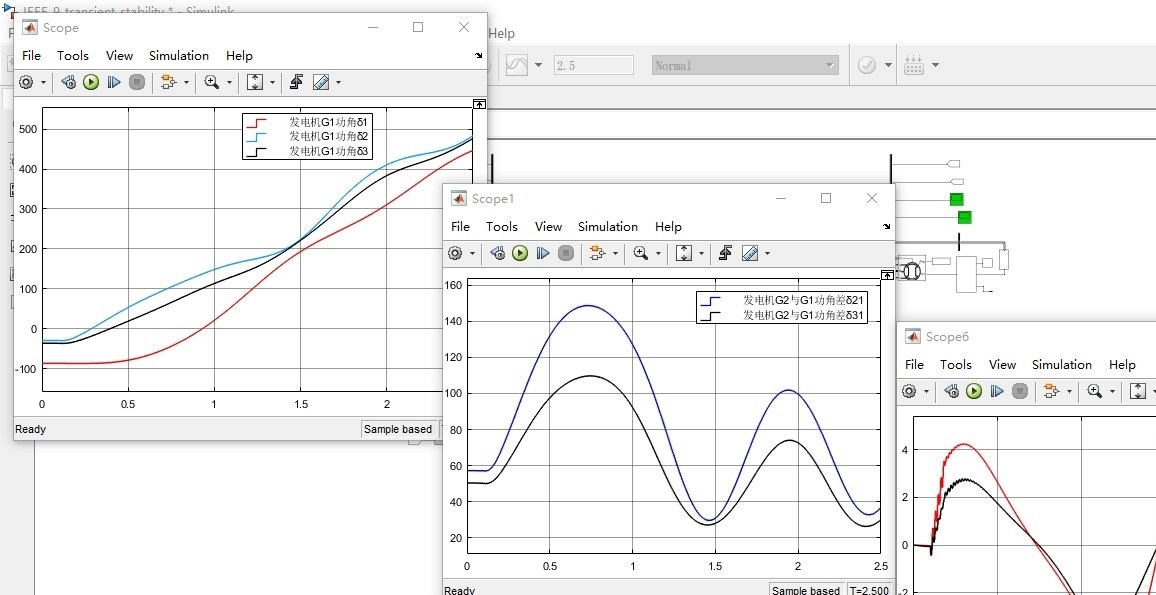
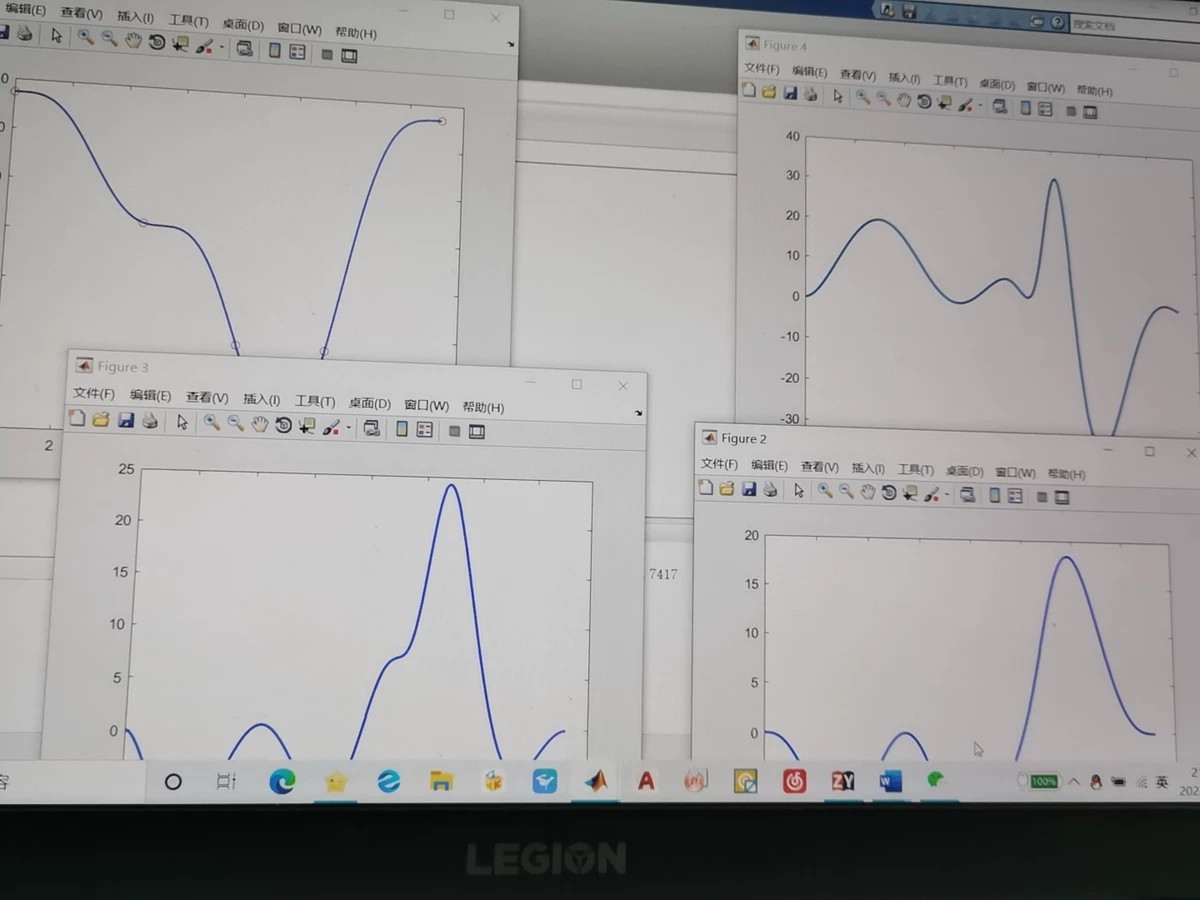
比对两种方法的功角曲线,发现用Simulink的结果更"圆润"——因为考虑了更详细的电磁暂态过程。1.Matlab编程计算摇摆曲线,得到3机9节点系统中3台发电机的功角曲线以及转速曲线,通过分析各发电机之间的功角差和转速差来分析系统暂态稳定性。2.基于Simulink平台,搭建3机9节点系统,通过时域仿真,得到三台机组的功角曲线和转速差曲线,以此判断系统的暂态稳定性。2.基于Simulink平台,
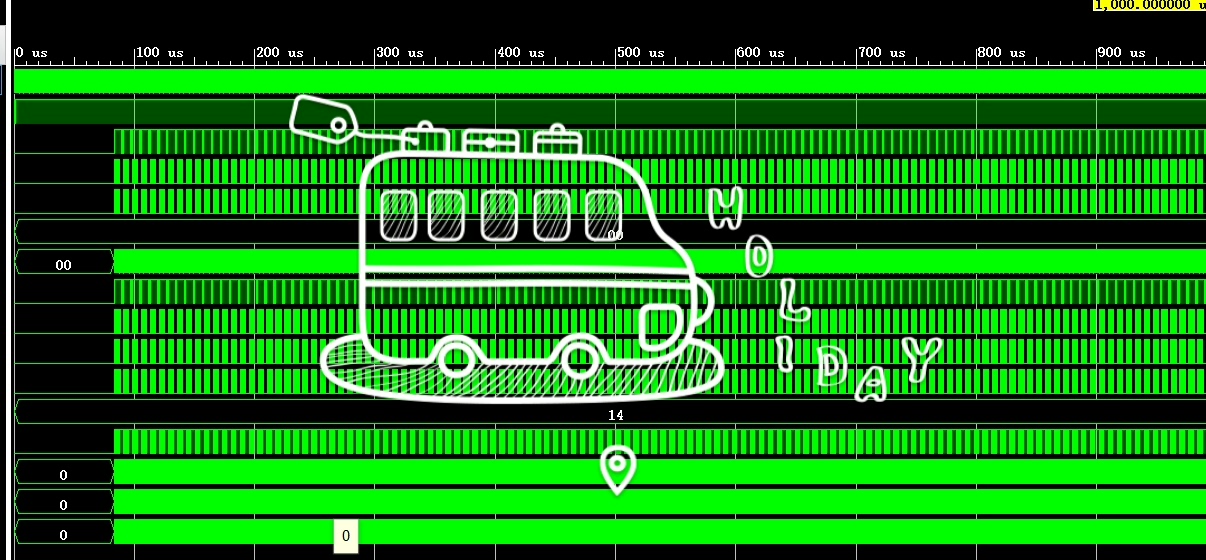
代码仓库已开源(假装有链接),下期预告:上神经网络做目标识别,敬请期待焊板子的香味!注意时钟配置要和后级处理模块对齐,实测25MHz时图像撕裂明显,降到12MHz后稳定得像条狗。画框模块有个坑:必须用脉冲生成方式绘制,直接写RAM会导致时序错乱。内容:ov5640配置和数据输出,rgb2ycbcr,帧差,腐蚀,膨胀,边框检测,加边框,hdmi仿真。内容:ov5640配置和数据输出,rgb2ycbc
先看5次和7次B样条的区别。5次B样条能保证加速度连续,但遇到需要更高平滑性的场景(比如微创手术机器人),就得用7次B样条确保加加速度(Jerk)连续。举个栗子,机械臂抓鸡蛋的时候要是加速度突变,蛋黄分分钟给你甩脸上。遇到过的一个神坑:B样条节点向量必须非递减,否则基函数计算会爆炸,记得在变异操作后加排序校验。有时候玄学调参比死磕公式更有效——比如把交叉概率调到0.8,突变概率0.2,亲测在机械臂
这个立体仓库项目规模相当大,拥有超过一万个库位,分布在上下两层。为了高效管理如此大规模的库存,现场配置了8台堆垛机和100多台输送机。整个系统以西门子S7-1500 PLC为核心,通过无线网桥与上层的仓库控制系统(WCS)进行通信,而WCS又与客户的仓库管理系统(WMS)无缝对接,形成了一个完整的智能仓储解决方案。这个项目不仅展示了西门子PLC在智能仓储系统中的强大功能,同时也体现了现代智能物流技

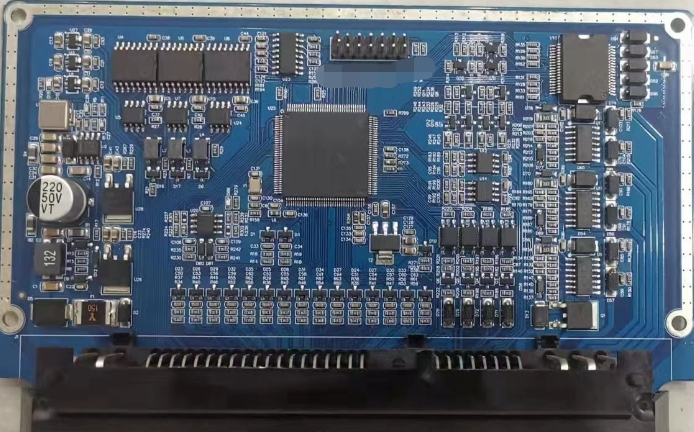
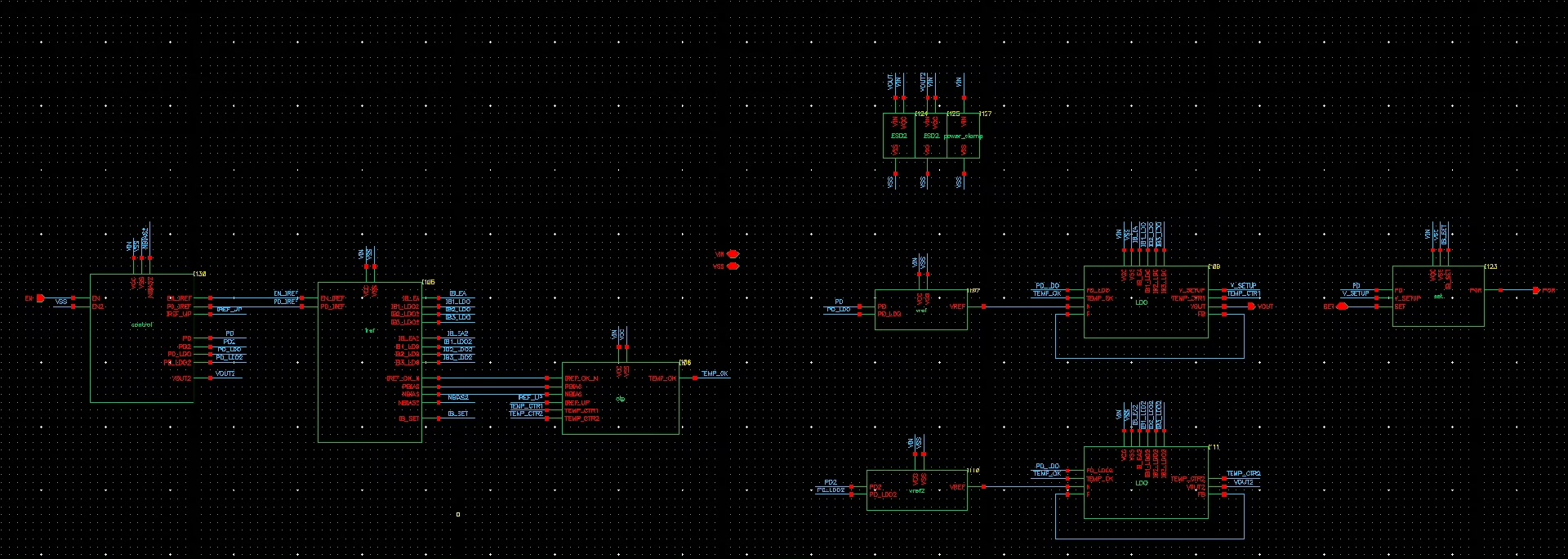
电源芯片300mA 低压差线性稳压器 + 上电复位RT9010 是附带了上电复位功能的低噪声、低压差 300mA 线性稳压器,可在 2.5V~5.5V 输入电压范围内工作,输出电压范围为 1.2V~3.6V。RT9010 提供精度为 2% 的输出电压,具有超低压差( 240mV@300mA )和超低静态电流消耗,关机模式下的电流消耗几乎为0,适用于电池供电的设备使用。它还具有电流限制、过热保护和输
通过以上的代码示例,我们可以看到使用C#和ORIN2 SDK进行DENSO机器人的二次开发还是比较简单的。我们可以方便地读取和写入机器人的数据,实现各种自动化操作。如果你也对DENSO机器人的二次开发感兴趣,不妨试试我的这套方法。要是在开发过程中遇到什么问题,或者想要整套源代码和DENSO机器人学习手册,都可以在评论区留言。DENSO机器人二次开发 C#读取和写入数据,使用官方SDK库ORIN2自
