
写文章




- @GHENYOUJIAN
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
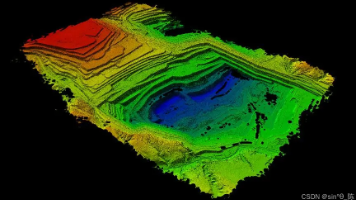
汇总!视觉定位中的十三种常用地图形式,一文就懂!(稀疏点云、Mesh、语义地图、神经网络隐式表征地图)
本文围绕视觉定位中的多种地图表达展开系统梳理,从稀疏/稠密点云、Mesh、CAD,到线地图、压缩点云、平面图、神经隐式地图、高精地图、矢量图与语义地图,讲解其定义原理、数学基础、生成链路、核心算法、应用场景与优缺点。
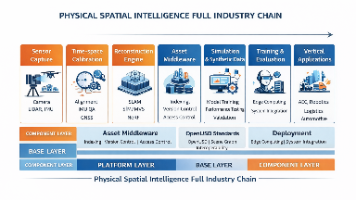
行业调研——为什么未来 10 年绕不过 NVIDIA:从 Omniverse、OpenUSD 到 Physical AI Data Factory
未来10年,NVIDIA将成为绕不过去的科技巨头,因其正在构建从真实世界数据到AI部署的完整平台化工作流。通过Omniverse、OpenUSD等工具,NVIDIA定义了3D/4D资产如何被仿真、训练和消费的标准。产业链分析显示,高价值公司并非单纯"会做3D",而是能将真实世界转化为可计算、可训练资产的平台。中国企业的机会在于卡位关键层,如XGRIDS的资产化工作流或YOOTT
部署OpenClaw必看安全事项!OpenClaw 与桌面 Agent 沙箱选型报告
当 AI 拥有浏览器、终端、文件系统和账号权限时,安全边界就比模型能力更重要。以 OpenClaw 为切口,讲清楚桌面 Agent 为什么必须重视沙箱、权限隔离与执行治理,以及个人和企业在落地时最容易忽视、却最关键的风险边界。
到底了