- @CjwEVwbUqy
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
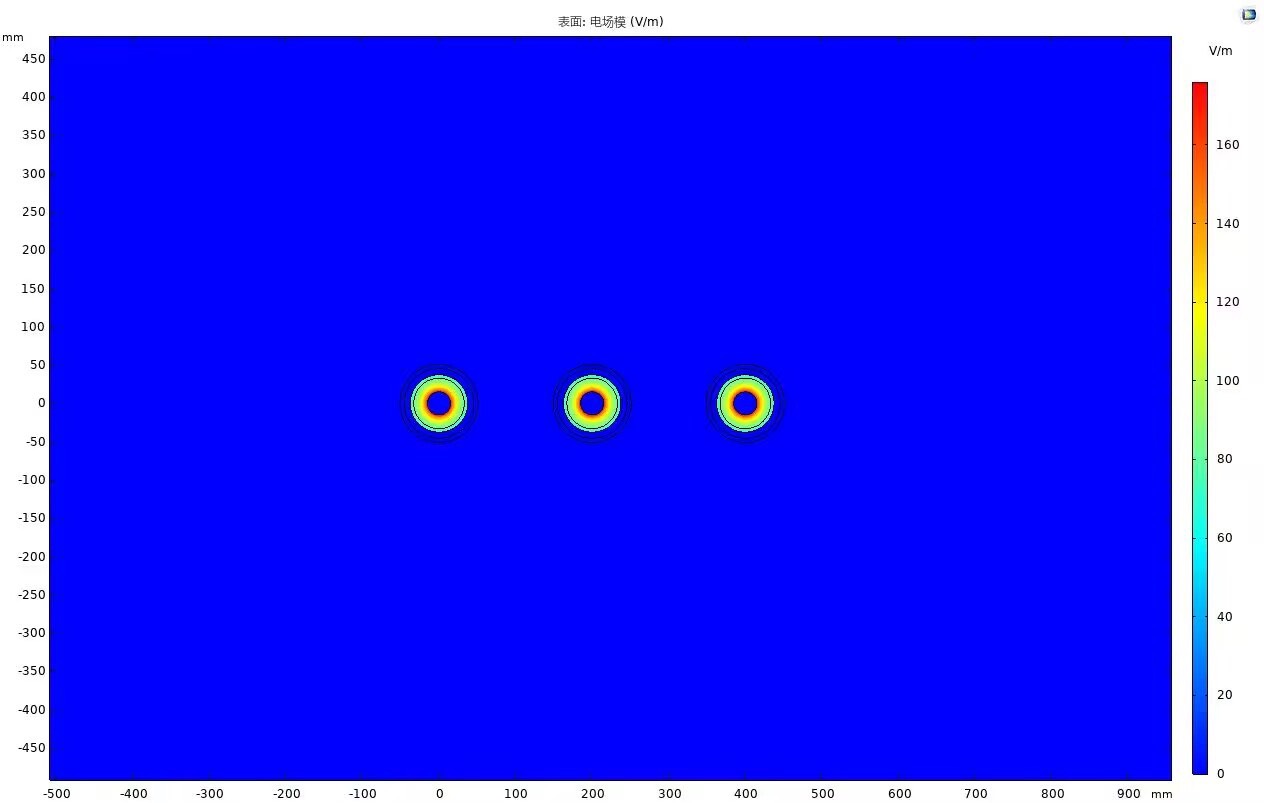
核心操作就是在Model Wizard里同时勾选电磁场(AC/DC模块)和传热模块,注意选上焦耳热那个多物理场耦合选项,不然就成各算各的了。先用频域求解器处理电磁场,再用瞬态求解器搞温度场,就跟先腌肉再下锅一个道理。今天就跟大伙儿唠唠怎么用这个模型同时搞出电磁场和温度场的分布,顺带分享点私藏的骚操作。comsol 埋地电缆电磁加热计算模型,可以得到埋地电缆温度场及电磁场分布,提供学习资料和服务,c
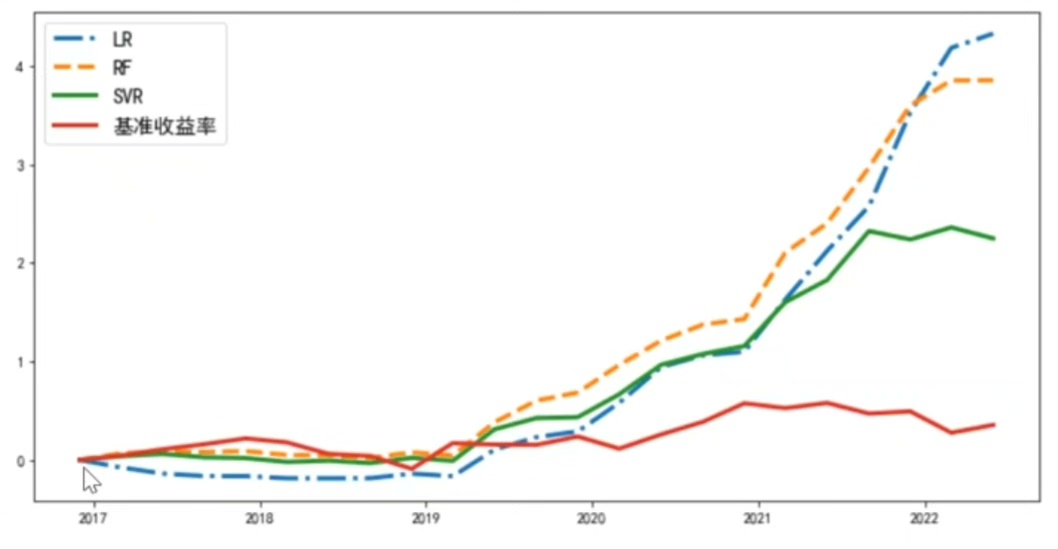
今天咱们就用Python手把手走一遍全流程,从数据到策略落地,中间踩过的坑和发现的宝藏都会掏出来分享。重点来了:特征选择一定要结合业务逻辑,MACD这种技术指标在机器学习模型里可能还不如简单动量因子好用。走完整个流程最大的感悟:机器学习在量化中的应用,七分靠数据,两分靠特征,一分靠模型。下次可以试试把新闻情绪数据加进因子,说不定有惊喜——当然,也可能是惊吓。年化收益计算有个坑:别直接用总收益率折算
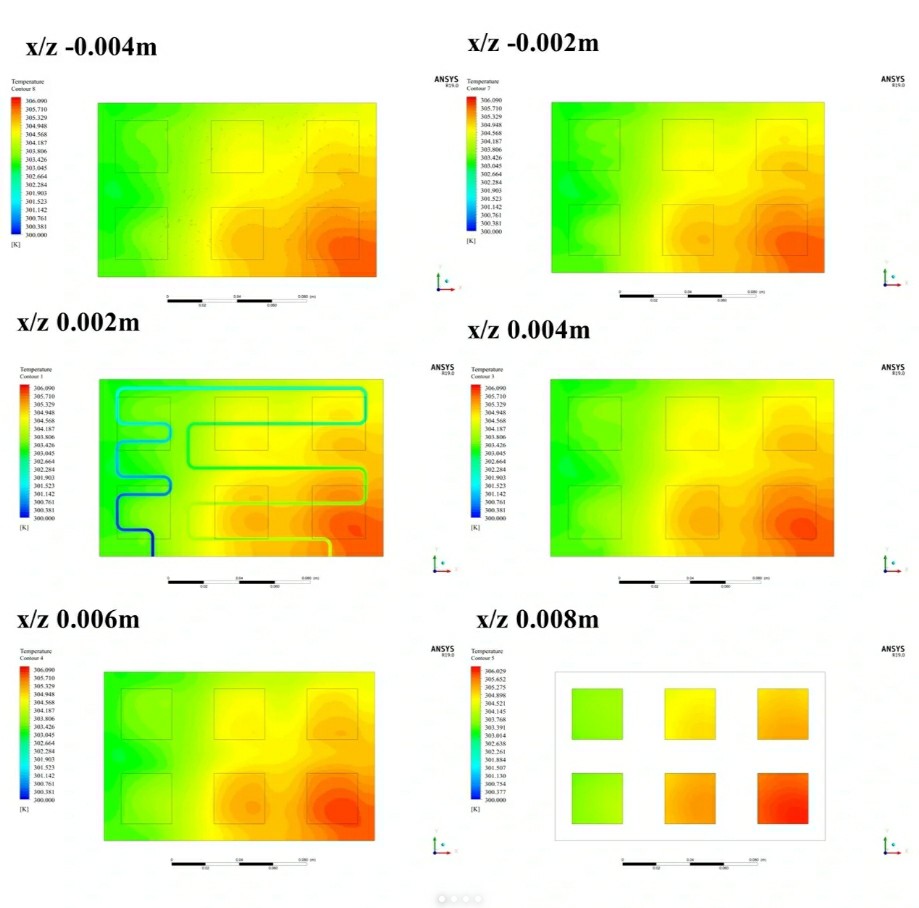
fluent芯片水冷散热的模拟散热片上的冷凝水珠沿着铝制表面慢慢滑落,实验室的示波器曲线突然开始剧烈抖动——这个场景让工程师老张意识到,他那台价值百万的服务器又双叒叕过热了。如今芯片热流密度突破100W/cm²早已不是新闻,传统风冷就像用蒲扇给火山降温,水冷技术正在从实验室走向量产。今天我们手把手玩转Fluent水冷仿真,用数值模拟代替昂贵的试错成本。
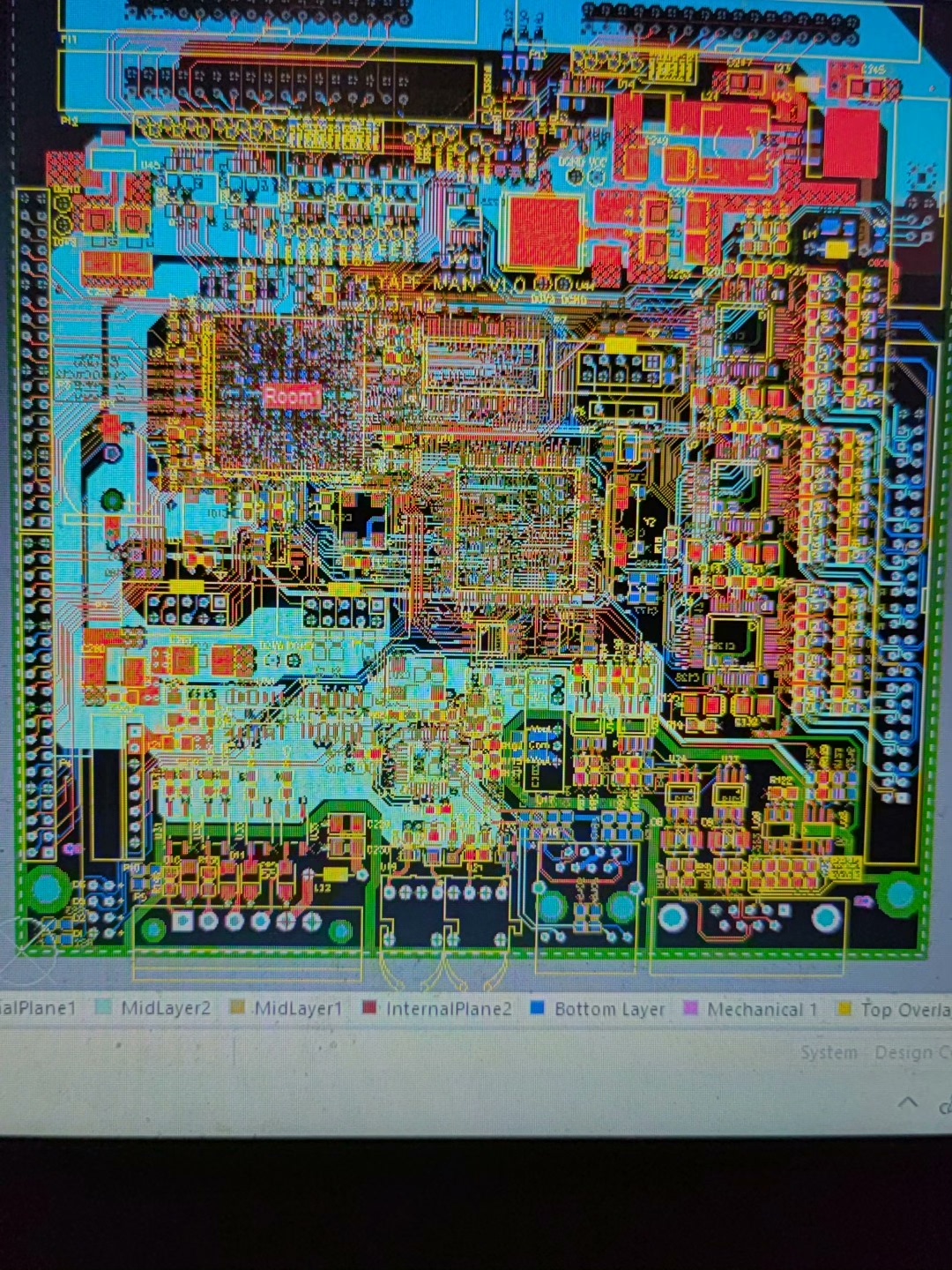
MTK,4G全网通模块设计资料,芯片支持6735,6753, 6737,8735,8783,六模26频(可选)仅提供PCB及SCH设计资料,爽快的可提供生产对应的量产资料,软件代码等,本人可提供MTK或高通系列4g5g芯片产品设计资料与软件代码。MTK,4G全网通模块设计资料,芯片支持6735,6753, 6737,8735,8783,六模26频(可选)仅提供PCB及SCH设计资料,爽快的可提供生

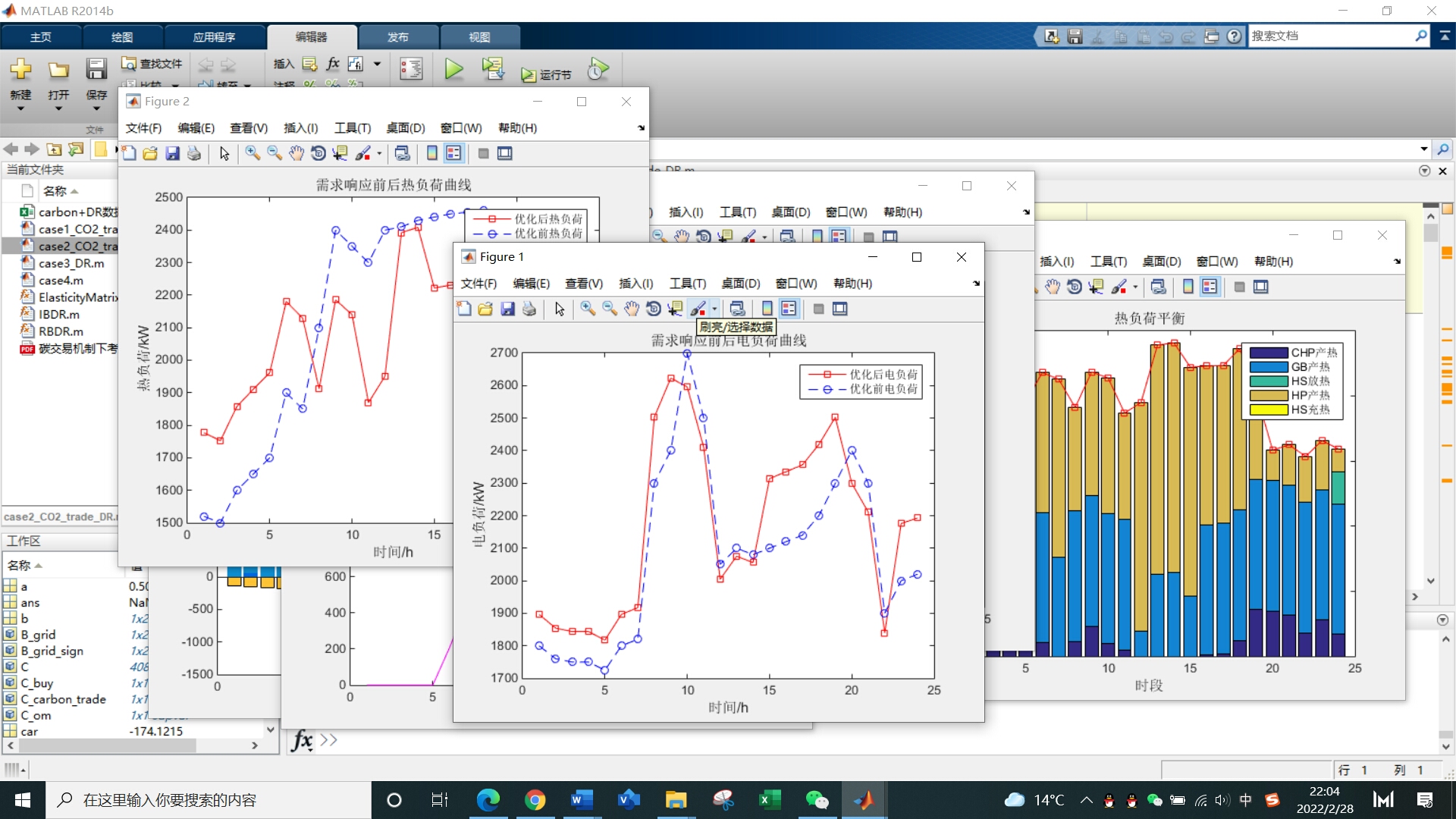
碳交易机制下考虑需求响应的综合能源系统优化运行首先,根据负荷响应特性将需求响应分为价格型和替代型 2 类,分别建立了基于价格弹性矩阵的价格型需求响应模型,及考虑用能侧电能和热能相互转换的替代型需求响应模型;其次,采用基准线法为系统无偿分配碳排放配额,并考虑燃气轮机和燃气锅炉的实际碳排放量,构建一种面向综合能源系统的碳交易机制;最后,以购能成本、碳交易成本及运维成本之和最小为目标函数,建立综合能源系
基于长短神经网络LSTM做多特征输入单输出的二分类及多分类模型。程序内注释详细,直接替换数据就可以用。程序语言为matlab。程序可出分类效果图,迭代优化图,混淆矩阵图具体效果如下所示。在机器学习领域,长短时记忆网络(LSTM)凭借其处理序列数据的独特优势,在众多分类任务中崭露头角。今天咱们就来聊聊如何用Matlab基于LSTM搭建多特征输入单输出的二分类及多分类模型。

总有些时候咱们得批量搞Python的whl包——比如要给内网机器搭环境,或者测试不同平台兼容性。今天直接上干货,用Python写个自动扒whl文件的脚本。当然,如果你连脚本都不想写,直接。最后提醒一嘴:别手贱把线程数开到100,PyPI那边可能会把你IP拉黑。注意这里没做异常处理——实际用的时候得加上重试机制。这时候返回的是各个版本号对应的文件列表。但问题来了——怎么从几十个文件里精准捞出需要的w
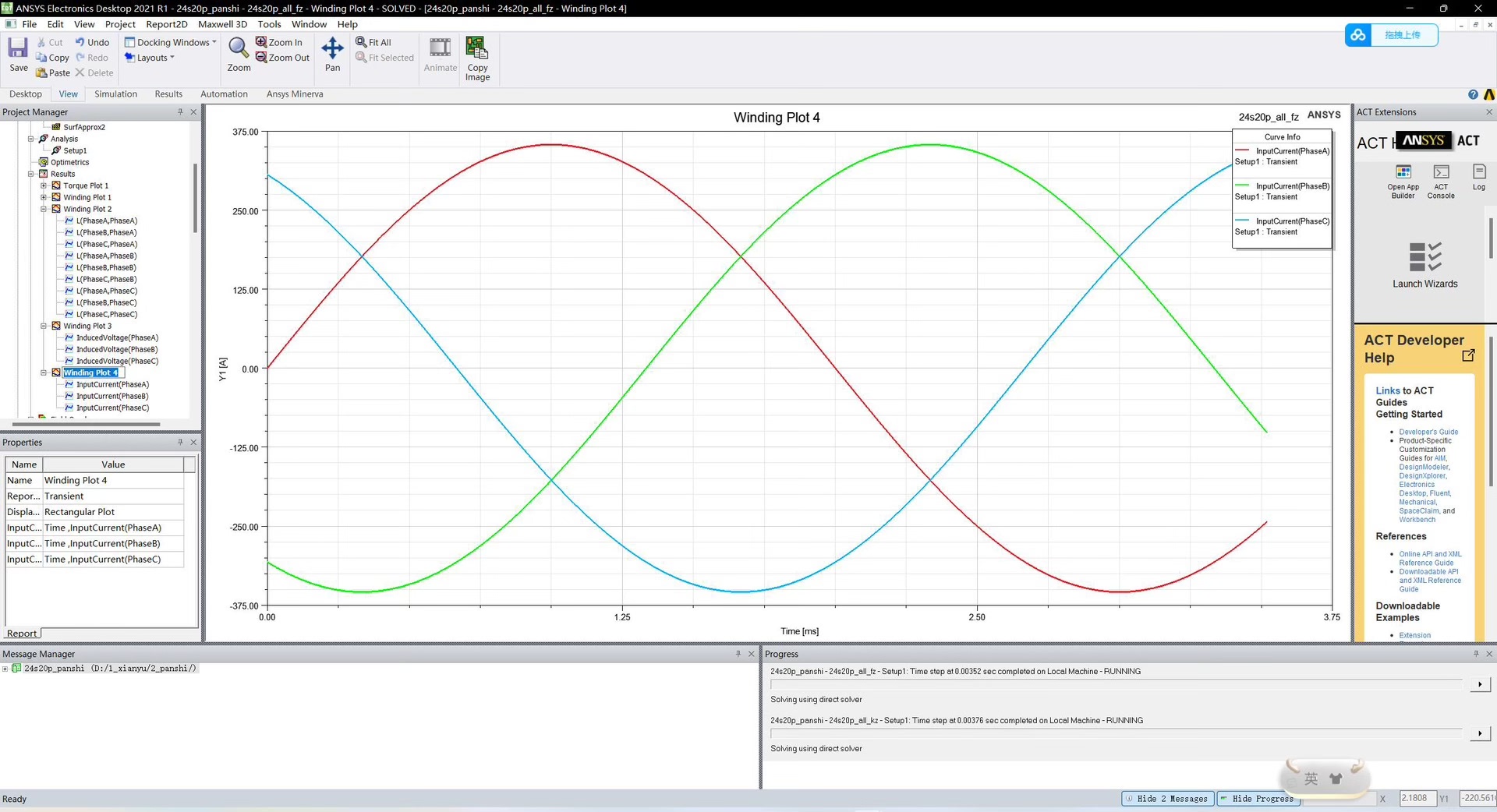
工程标识:明确基于ElectronicsDesktop 2022R1创建,表明为独立Maxwell模型,不依赖Workbench协同环境版本控制:通过锁定软件版本,确保材料属性、求解算法的兼容性特性开关关闭高级仿真特性(如多物理场耦合高阶算法),降低计算资源消耗材料模块通过MaterialName='di'Description='电机内径'Name='do'Description='电机外径'
低压400V 100A三电平有源电力滤波装置硬件图纸资料,包含原理图、Pcb图、程序源代码、结构图纸及设计调试资料。Apf(SVG)包含50A.75A.100A.150A。产品具有多年批量应用经验。最近在研究电力滤波相关的技术,发现一款超有意思的产品——低压400V 100A三电平有源电力滤波装置,忍不住要和大家分享一下。
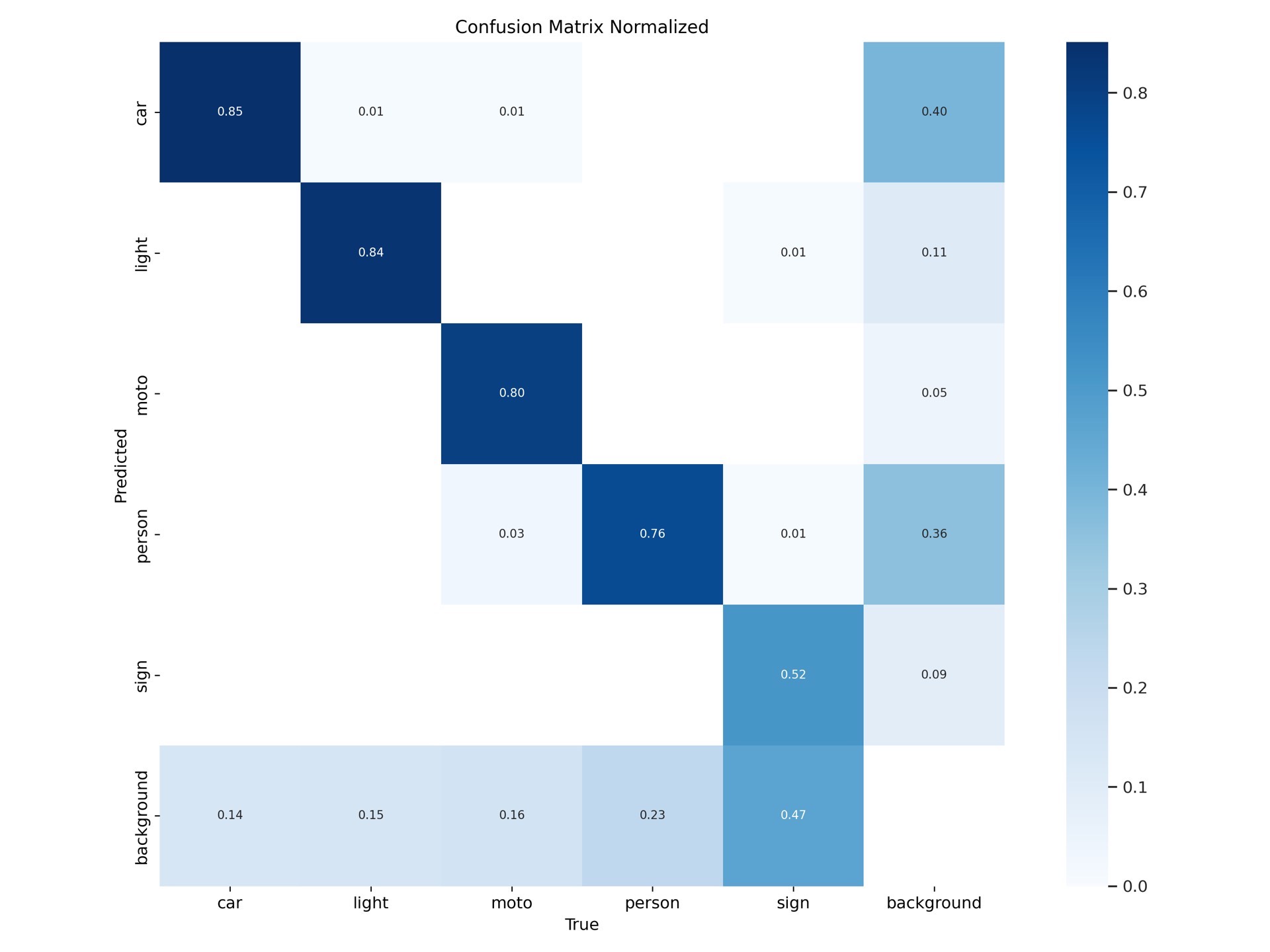
5类实时交通自建目标检测数据集该数据集包括car,light,moto,person,signs等5个类别总计图片1498张,训练集998张图像,验证集和测试集分别是250张图片数据集已经划分为训练集/验证集/测试集数据集支持YOLO格式/VOC格式/COCO格式数据集在yolov8s上mAP50是0.763,P是0.791数据集未经任何图像预处理等操作,皆是原始图片可直接使用,可直接使用,可直接