




- @CHEESEFAIRY_P
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在智慧农业的快速发展中,果蔬采摘机器人以其自动驾驶技术与视觉识别技术的完美融合,正逐步成为农业生产中的重要力量。这些机器人不仅实现了对果蔬的精准定位,还显著提高了采摘效率,展现了强大的技术优势。
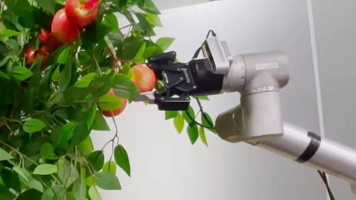
智能采摘机器人正在重塑现代农业。深圳普蓝机器人研发的这款融合视觉识别、自动驾驶和机械臂技术的智能设备,能在复杂农田环境中自主导航,精准识别成熟果蔬并完成无损采摘。通过深度学习算法和多传感器融合,机器人实现了厘米级定位、成熟度判断和柔性抓取,解决了传统农业劳动力短缺、效率低下等问题。这款代表智慧农业前沿的"新农人",不仅具备全天候作业能力,更为农业科研提供了算法优化和自动化研究的

在智慧农业的快速发展中,果蔬采摘机器人以其自动驾驶技术与视觉识别技术的完美融合,正逐步成为农业生产中的重要力量。这些机器人不仅实现了对果蔬的精准定位,还显著提高了采摘效率,展现了强大的技术优势。
三重防护设计叠加,让底盘轻松满足重载、防震、越野三大核心要求,同时机器人的封闭式机体有着高防水等级的对外通讯和供电接口等设计,在各种复杂挑战性路段中移动机器人即便承载精密仪器,也能在复杂颠婆地形中保持稳定行驶,为移动机器人的安全运行筑牢基础。深圳普蓝机器人的超强承重越野性移动机器人底盘,独立四轮悬架与独立四轮驱动机械结构设计,拥有强大的动力系统和卓越的稳定性,以 “硬核结构 + 全面性能 + 广泛

室内差速转向移动机器人以安全灵活全方位灵活为根基,以强大自主导航避障为核心,以开放可扩展为灵魂,其中移动机器人的自主导航与自主避障系统不仅确保了机器人的基本运行能力,更是通过 “精准、安全、灵活” 的特性,为各领域的智能化应用提供了可靠支撑。教育科研先锋:作为高校及研究机构的理想平台,差速转向移动机器人完美支持ROS(机器人操作系统)、MPRT、PIXHAWK等开源项目,助力开展机器人学、人工智能

室内差速转向移动机器人以安全灵活全方位灵活为根基,以强大自主导航避障为核心,以开放可扩展为灵魂,其中移动机器人的自主导航与自主避障系统不仅确保了机器人的基本运行能力,更是通过 “精准、安全、灵活” 的特性,为各领域的智能化应用提供了可靠支撑。教育科研先锋:作为高校及研究机构的理想平台,差速转向移动机器人完美支持ROS(机器人操作系统)、MPRT、PIXHAWK等开源项目,助力开展机器人学、人工智能
普蓝机器人的移动机器人底盘,凭借卓越的性能和强大的可扩展性,成为 ROS 教育、AI 教育、机器视觉及大模型应用领域二次开发的理想工具,广泛适配多种场景,为大学、科研院所等机构提供了无限的创新可能。在 AI 教育和机器视觉研究中,开发者可以根据具体需求搭载不同的设备,进行多样化的实验和项目开发,拓展了底盘的应用范围。在二次开发中,即使搭载了多种实验设备,底盘依然能够保持良好的运动性能,为各类功能的