- @BMHRvymM
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
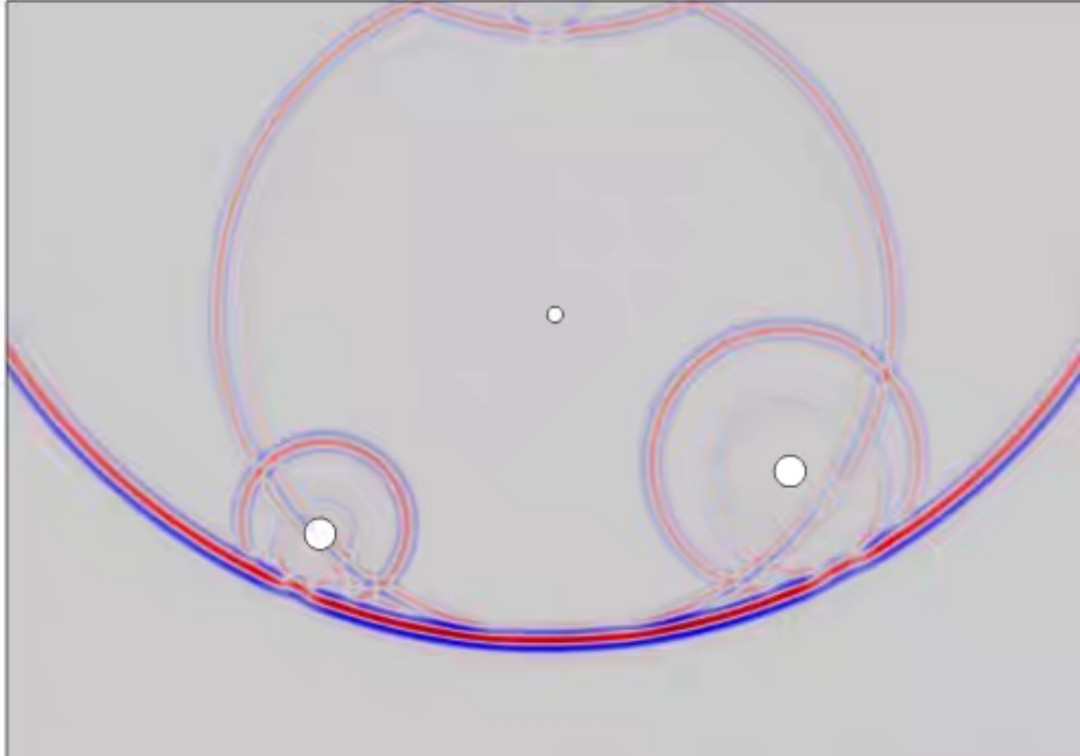
今天咱们就手把手玩转这个算法,顺便用Comsol建个仿真模型搞点全矩阵数据(FMC)尝尝鲜。模型跑完后导出数据时,记得把每个A扫信号按发射-接收阵元序号存储成三维数组(32x32xN)。在Comsol里搭建仿真模型时,重点在于全矩阵数据的获取。建议使用"参数化扫描"功能,逐个激励发射阵元,同时所有阵元接收信号。超声相控阵全聚焦算法及Comsol超声全矩阵仿真模型(仿真模型可以获得全矩阵数据)超声相
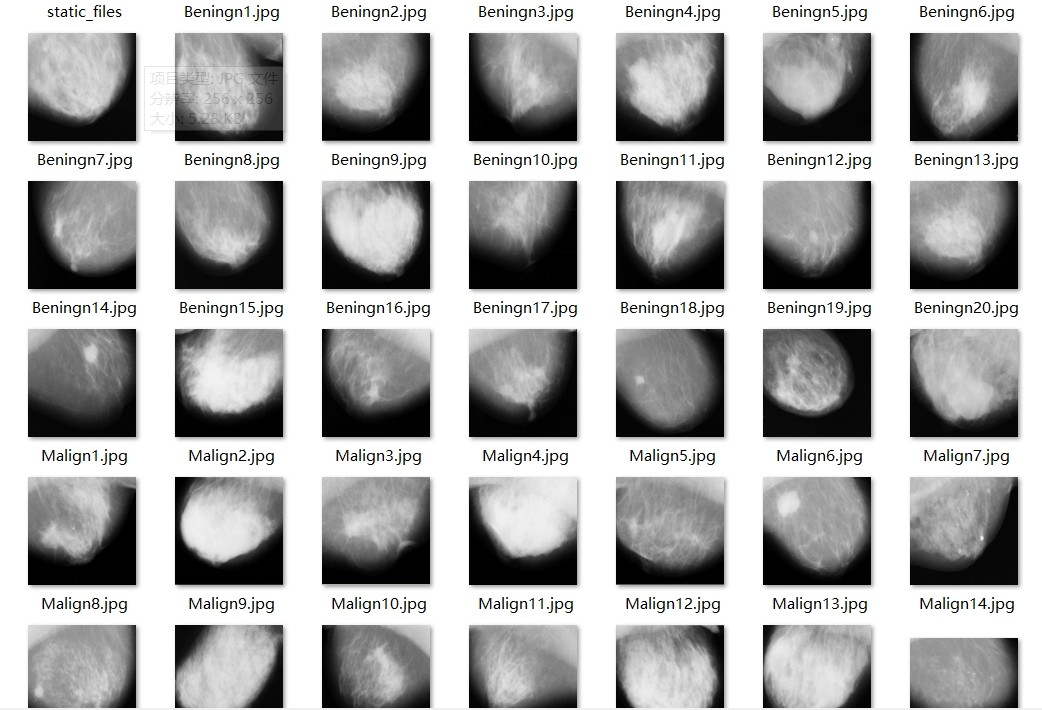
整个项目跑下来最大的感悟:医疗AI模型的落地,30%靠算法,70%靠数据质量和领域知识。在后续优化中,我们增加了动态学习率调整策略,在验证loss出现平台期时自动切换优化器(从SGD切到Adam),准确率提升了2.3个百分点。不过要真正用于临床,还需要解决模型可解释性和小样本学习的问题,这又是另一个故事了。拿到威斯康星乳腺癌数据集的时候,发现原始数据是.mat格式的超声图像和标注信息。这里有个坑:
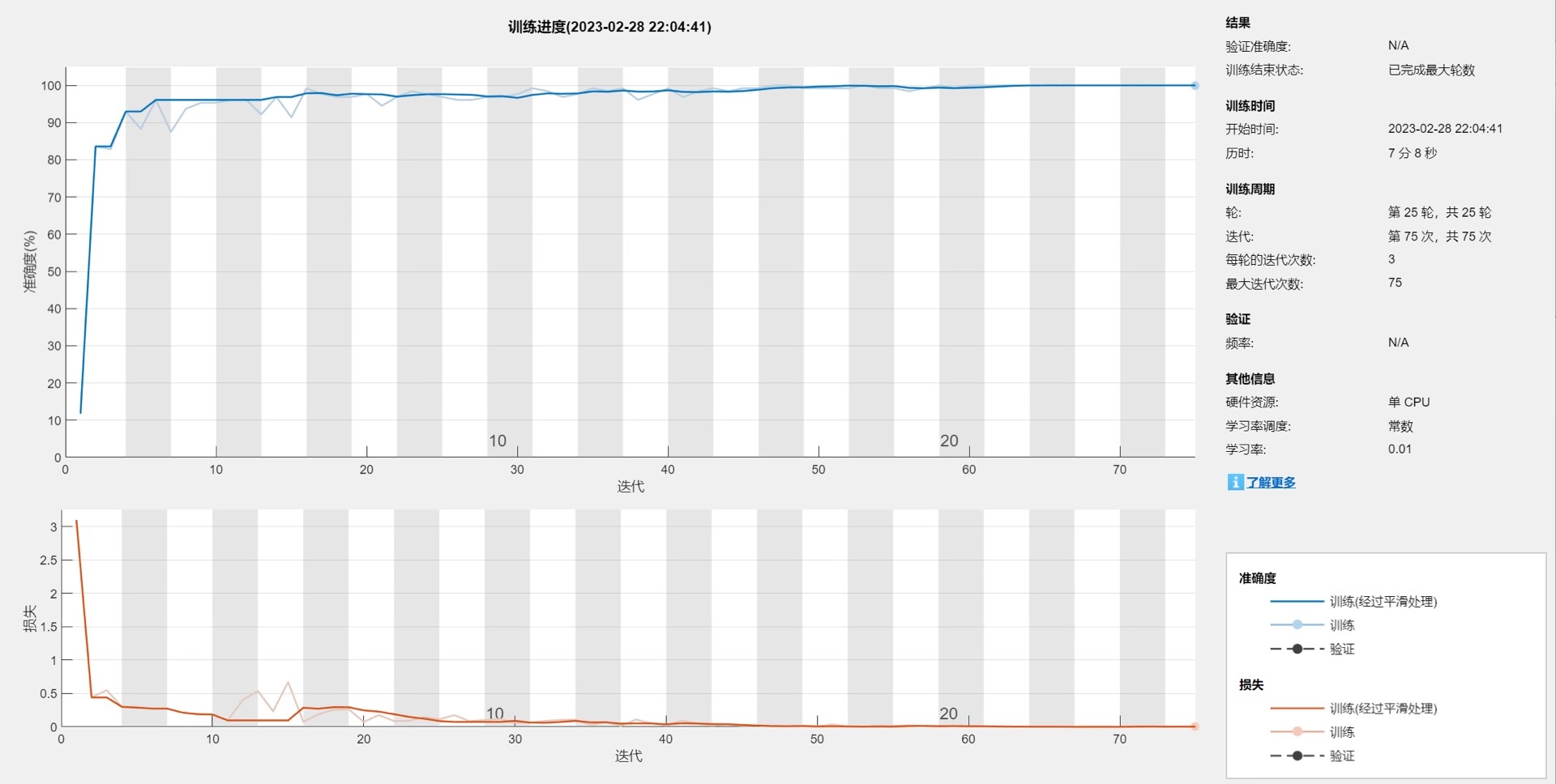
深度学习 5层CNN代码实现图片分类训练集共有9个文件夹代表9类,每类有50张图片,可根据需要自行准备训练集MATLAB代码,代码注释清楚,容易上手温馨提示:联系请考虑是否需要,(Example_7)在深度学习领域,卷积神经网络(CNN)是图片分类任务中极为常用且强大的模型。今天咱就用MATLAB来实现一个5层CNN做图片分类,数据集有9个类别,每个类别50张图片。
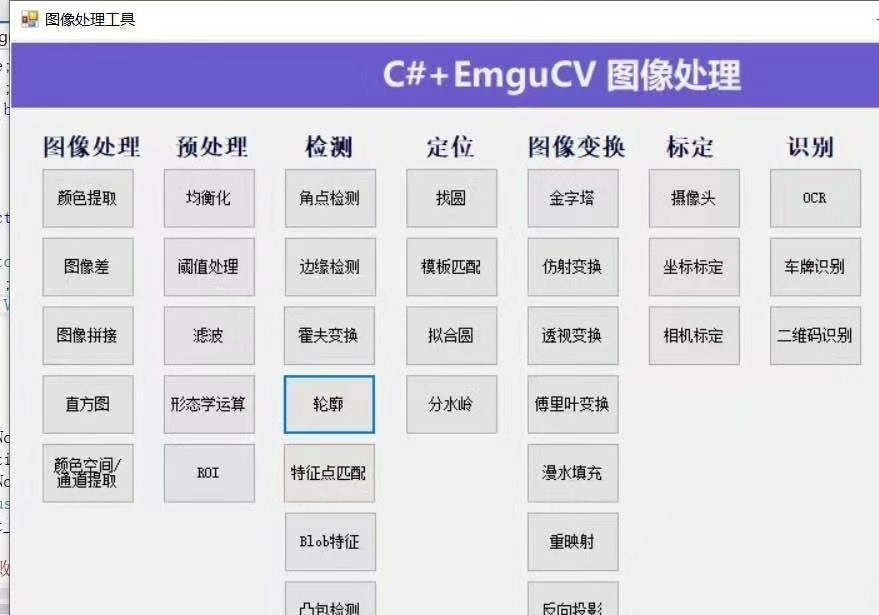
OpenCV(Open Source Computer Vision Library)是一个开源的计算机视觉库,涵盖了各种图像处理和计算机视觉算法。它提供了大量基础且实用的函数,从简单的图像读取、显示,到复杂的特征提取、目标识别等,一应俱全。对于初学者来说,OpenCV 的入门工具集是学习图像处理的绝佳起点。通过 C# 联合机器视觉平台,借助 OpenCV 入门工具集,我们能够轻松地踏上图像处理的
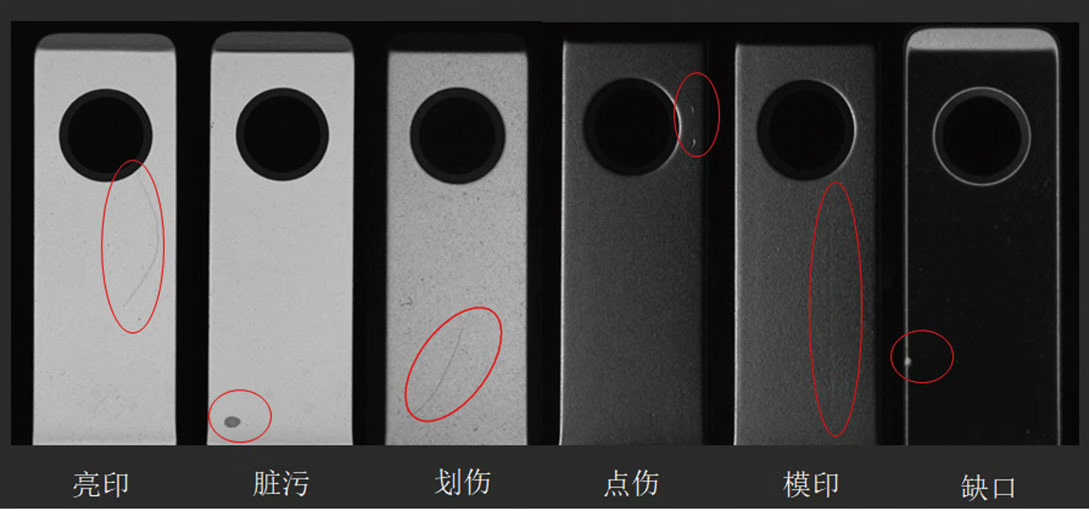
AI深度学习视觉系统方案。定位、分割、分类、检测。支持无监督模型、小样本训练模型定制。神经网络、开源框架、底层算法开发。支持opencv、halcon、vm深度学习开发。多年视觉项目开发与落地经验。承接珠三角地区项目,优质项目可考虑全国地区。包括软硬件方案、开发、安装调试。在当今数字化飞速发展的时代,AI深度学习视觉系统宛如一颗璀璨的明星,在众多领域大放异彩。今天就来和大家详细聊聊我所参与的AI深
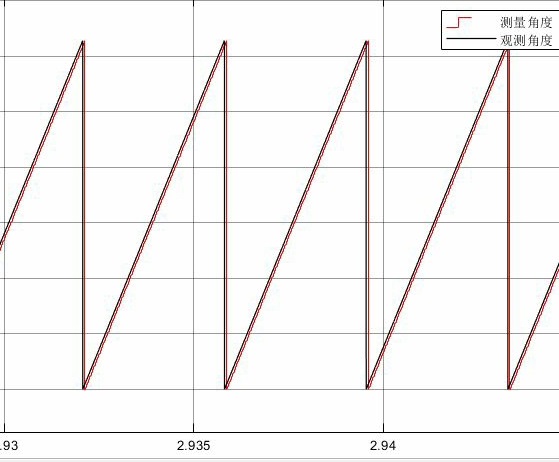
最近在搞SPMSM无感控制的项目,发现模型参考自适应(MRAS)这玩意儿在中高速段确实能打。先说说整体架构:低速用I/F控制硬扛,中高速切MRAS无感矢量,实测波形平滑得跟德芙似的。注意那个0.05的自适应增益,调大了容易振荡,调小了响应慢,建议先用自动整定工具找基点。重点戏在MRAS自适应模块。基于模型参考自适应控制的 SPMSM 无感矢量控制的MATLAB simulink仿真。低速I/F控制
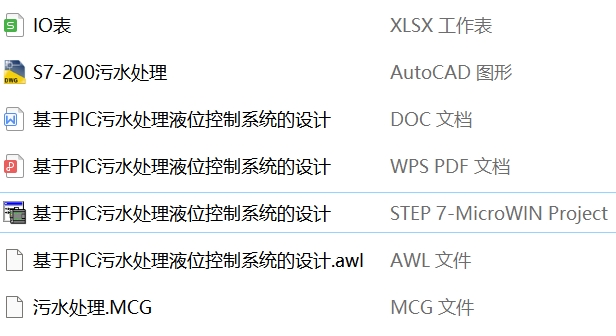
组态软件和PLC得建立起顺畅的沟通桥梁。定义通讯协议,比如采用Modbus协议,设置好波特率、数据位、校验位等参数,确保数据准确传输。基于PLC的污水处理系统从设计到调试是一个复杂但充满成就感的过程。硬件设计搭建起系统的骨架,软件设计赋予它智慧的“大脑”,组态设计让它拥有直观的“界面”。经过一步步精心打造和调试,这个系统就能稳定高效地处理污水,为环保事业贡献力量。希望通过这篇文章,大家对基于PLC
最近在折腾多智能体系统的一致性控制时发现,传统的时间触发机制总让人觉得有点"强迫症"——明明系统状态没怎么变化,还得按时按点做计算和通信。这就好比微信群聊里设置了消息免打扰,只有@你的时候才看消息。实际跑起来会发现,随着系统趋向一致,触发频率越来越低,最后稳定时基本不再触发。参考文献[2]指出,阈值设置得太小会导致频繁触发,太大又会影响收敛速度。多智能体系统,一致性,事件触发,一阶事件触发仿真文件
虚拟同步发电机(vsg) 双机并联电压电流双闭环控制SPWM 调制总负荷 240kw10kvar2-4s 投入 60kw 负荷可根据需求设置两台 vsg 增发功率无功功率实现均分电压电流 THD≤2% 符合国标要求可提供参考文献附部分波形图在电力系统的研究与应用中,虚拟同步发电机(VSG)技术正逐渐崭露头角,尤其是在双机并联场景下,它为电力供应的稳定性和可靠性带来了新的思路。今天咱们就来聊聊基于V
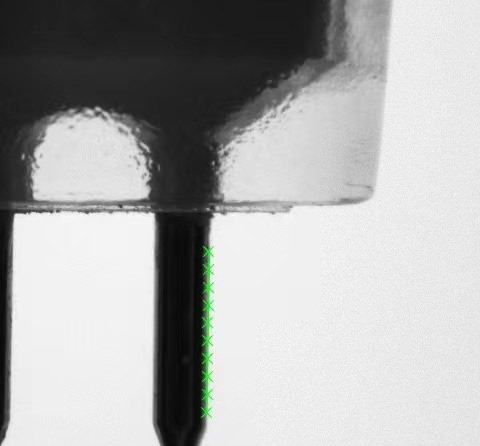
这个工具最骚的操作在于——按住鼠标拖动就能实时生成测量线,松开自动锁定,像极了科幻片里的激光标尺。但要注意,GaussianBlur的核大小直接影响边缘连贯性——太大容易丢失细节,太小则噪声太多,这个平衡需要根据具体场景调整。实测在1080p图像上能达到60fps的流畅度,测量误差在±0.5像素以内——这精度足够帮老板省下买专业测量软件的钱了(码农的尊严+1)。当我们在图像上拖拽时,程序实时计算两