- @2509_94268504
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
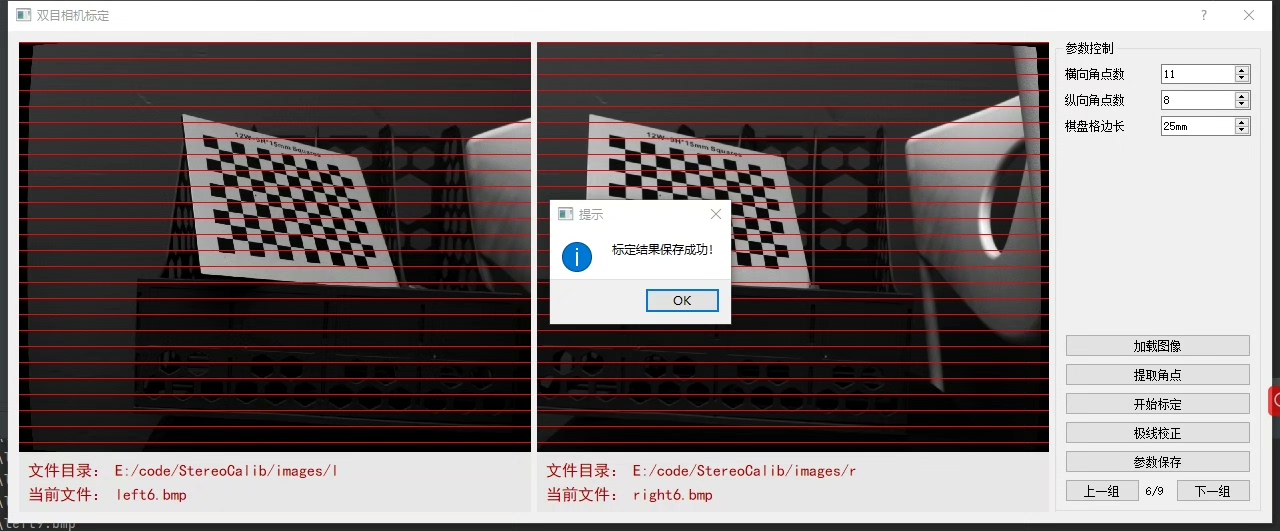
python双目相机标定极线校正,棋盘格主要功能描述:1、程序界面使用pyqt开发;2、自动检测无效图像并去除;3、标定后显示重投影误差分布散点图;4、依据标定参数对图像做极线校正并显示;5、标定结果存储到xml文件;在机器视觉领域,双目相机标定与极线校正可是相当重要的环节。今天咱就用 Python 搭配 PyQt 来实现这么一个超酷的功能,还会用到棋盘格来辅助我们完成标定哦。
这个架构最大的优势是扩展性强,最近客户提出要支持新型Delta机械手,只需继承MotionCommand实现新的运动算法,界面层几乎不用改动。最近用MFC撸了个控制卡程序,核心功能是让设备按编辑好的运动流程执行动作。开发时踩过的坑:圆弧插补的坐标系转换要特别注意控制卡的实际脉冲当量,曾经因为漏算减速比导致机械臂画圆变成椭圆。运动流程可以在线编辑,支持输入输出,回原点,插补运动,等待。程序编辑区域,
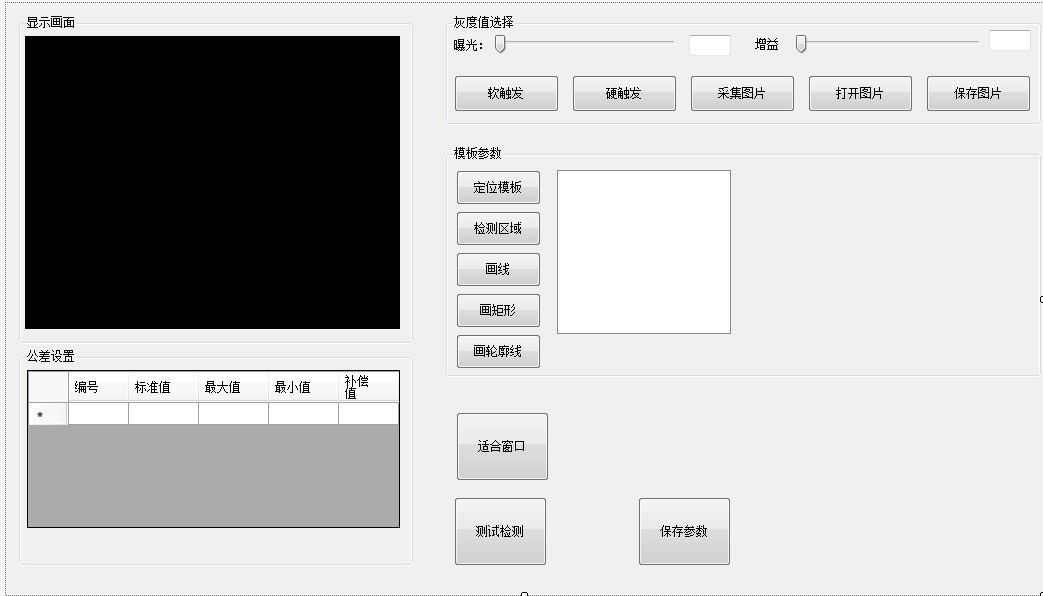
最近在工业视觉项目里折腾了一套字符缺陷检测系统,核心用C#搭界面和逻辑控制,底层图像处理交给Halcon。四个Basler相机怼在工位上抓拍,那场面跟拍电影似的,不过实际开发可比拍电影刺激多了。这里有个坑——曝光时间超过20ms时容易拖帧,后来发现是USB3.0带宽被隔壁工位的扫码枪抢了,改走独立USB控制器才解决。最坑爹的是输出口烧了两次,后来发现是电磁阀反向电动势没处理,并联个二极管立马消停。
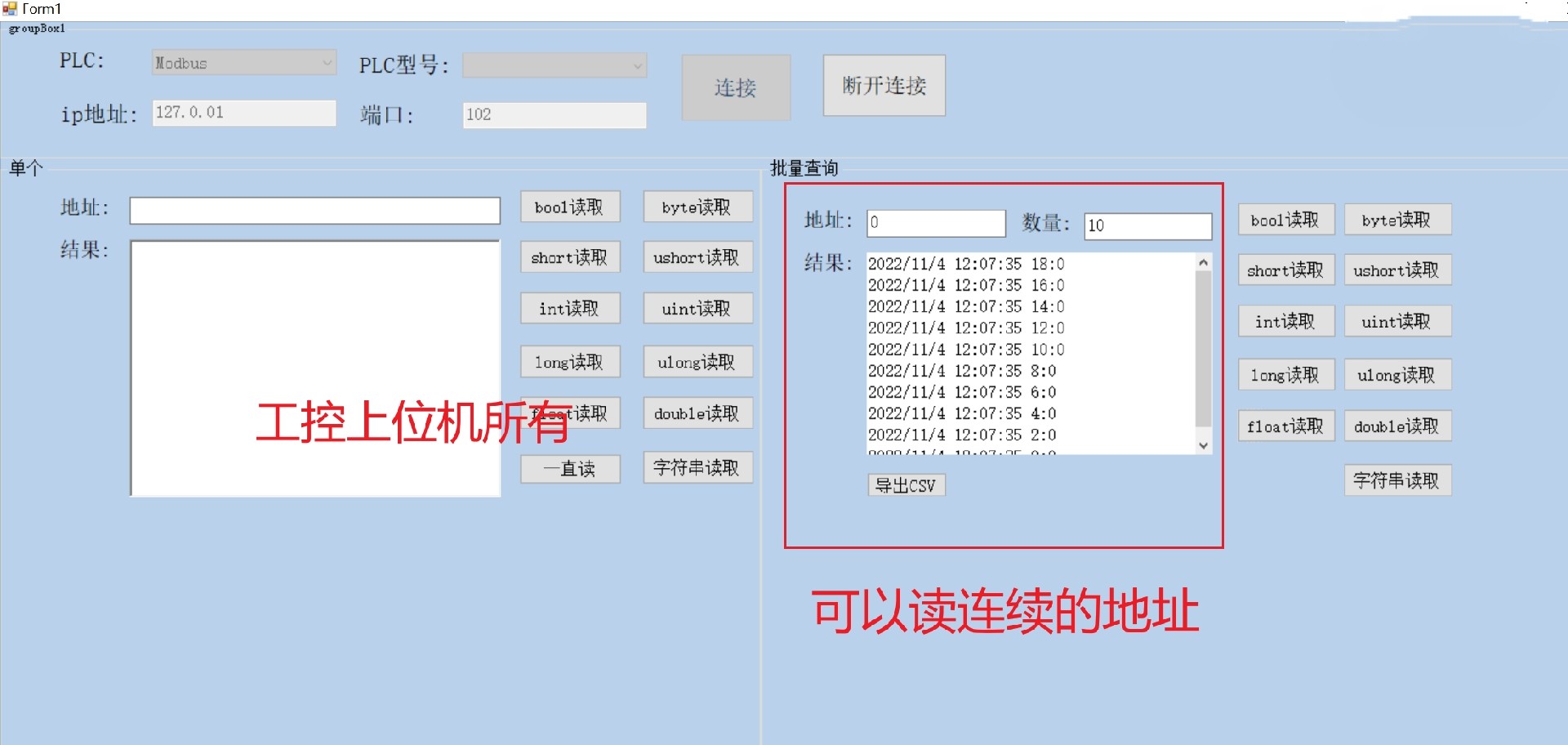
OPC DA(OLE for Process Control Data Access)是一种用于自动化和工业控制系统的标准数据访问协议。它允许不同厂商的设备和应用程序之间进行数据交换。简单理解,就像是不同语言的人通过一种通用语言来交流,OPC DA就是这个自动化领域的通用语言。
本系统是一个完整的说话人识别解决方案,采用梅尔频率倒谱系数(MFCC)进行语音特征提取,结合高斯混合模型(GMM)进行说话人建模和识别。系统在MATLAB平台上实现,包含语音预处理、特征提取、模型训练和识别测试等完整流程。
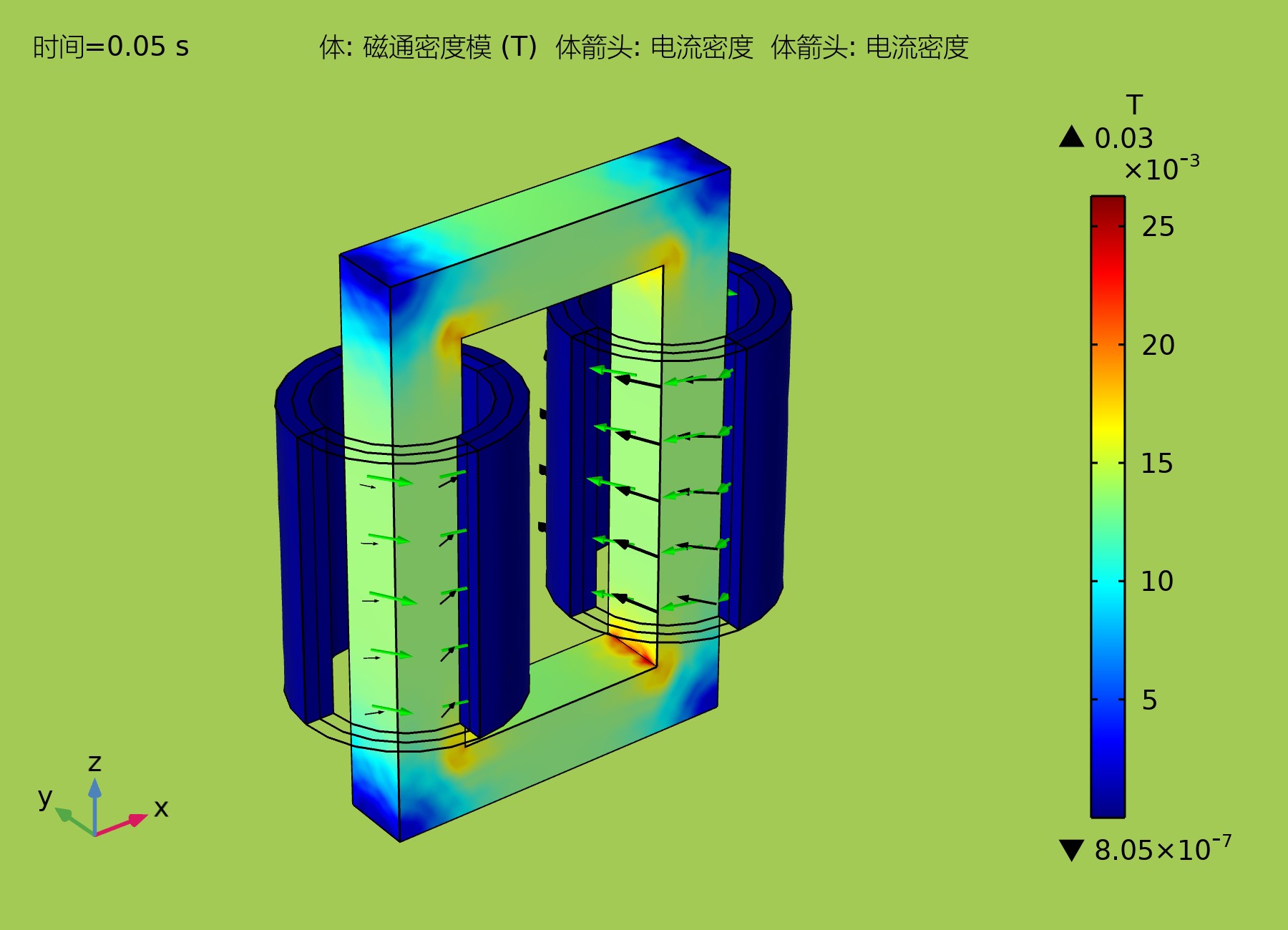
就拿电磁感应加热来说,线圈电流产生磁场,磁场在工件里搞出涡流,涡流转化成热量,热量又反过来影响材料属性——这环环相扣的过程用传统单物理场模拟根本玩不转。今天咱们就来唠唠怎么在COMSOL里把这些物理场串成糖葫芦,特别是那个让人头秃的损耗计算。这里有个坑要注意:当频率超过1MHz时,别忘记勾选"计算位移电流",不然高频工况下的损耗能差出姥姥家。这里有个骚操作:可以右键点击热源表达式,选"转换为场函数
粒子群优化支持向量机SVM,最小二乘支持向量机LSSVM,随机森林RF,极限学习机ELM,核极限学习机KELM,深度极限学习机DELM,BP神经网络,长短时记忆网络 LSTM,Bilstm,GRU,深度置信网络 DBN,概率神经网络PNN,广义神经网络GRNN,Xgboost .....这玩意儿就像给大厨找最佳调料配比——模型本身是厨具,参数就是那勺盐、半勺糖,调对了味儿才能出好菜。这段代码骚操作
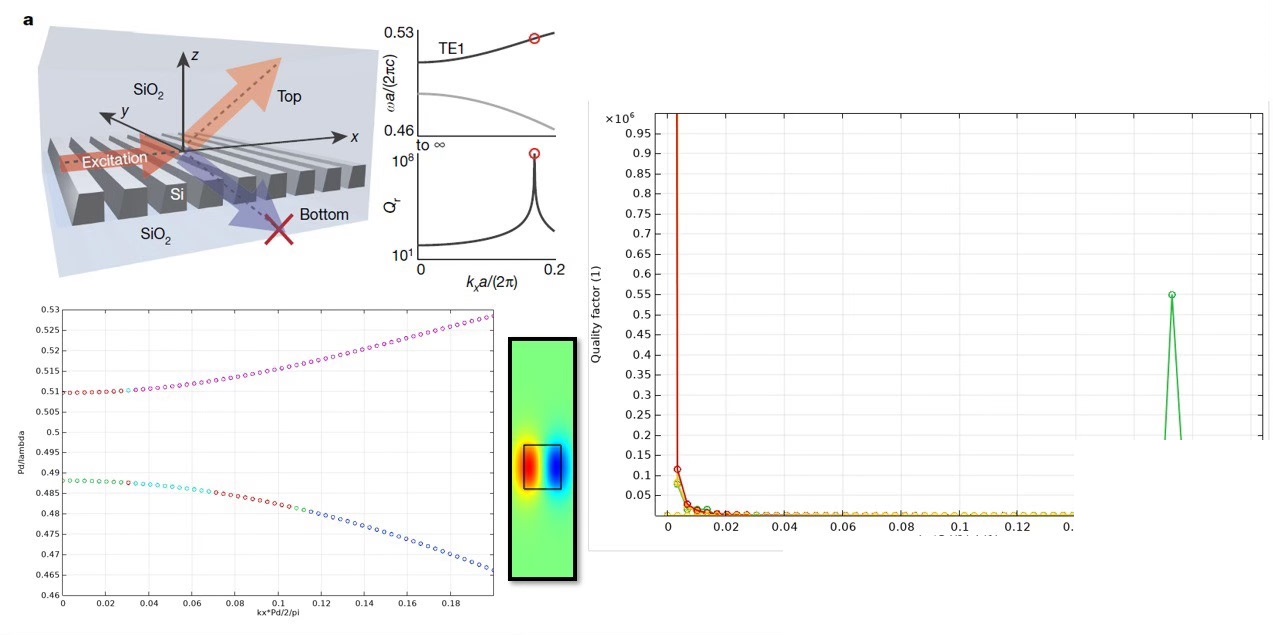
下次设计时不妨先找个对称破缺参数当调节旋钮,配合Comsol的参数化扫参,说不定就能钓到那条Q值暴涨的"大鱼模式"。在光子晶体和超表面设计中,连续体中的束缚态(BIC)就像是被光场意外捕获的"幽灵模式"。当我们将光栅倾斜角从0°扫到5°时,神奇的事情发生了——在特定角度下Gamma点的Q值突然飙升三个数量级。有个骚操作:在Gamma点附近设置泄漏通道监测器,当模式的有效折射率接近环境介质时,辐射损
将博图WinCC中的变量作为历史数据记录到SQL Server数据库中,并将历史数据记录作为曲线图的方式展示出来,软件采用博图V15.1Adanced编写,数据库为SQL Server2014变量循环记录20000条,间隔2S记录一次数据到数据库中,有需要的朋友可以联系我!数据存进SQL Server之后,用个ASP.NET页面就能拉出趋势曲线,设备状态一目了然。资源包扣,数据库的安装方法和下载地
的参数设计得挺讲究:第一个参数指定目标报表,第二个是记录位置(1表示新增行),接着是数值和单位,最后的备注字段特别适合用来打标记。建议把高频采集数据和低频事件数据分表存储,见过最狠的项目里有人把每秒采集的数据和每小时的统计报表混在一个表里,查个三日数据等了半分钟——这酸爽谁用谁知道。最近在调试组态王的报表功能时发现个挺有意思的需求——既要实现特定条件下的数据自动入库,又要能灵活调取历史记录。查历史