- @2509_94268297
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
LabVIEW的视觉模块藏着不少宝贝,IMAQ Read CSV Data配合图像采集卡,分分钟把MNIST数据集转成768KB/张的灰度图。实测发现,用LabVIEW的Parallel For Loop做批量训练,8层网络跑100 epoch比TensorFlow快15秒。需要的老铁评论区吼一声,咱们搞工业自动化的,就该用最硬的工具干最野的AI!这套系统在半导体工厂跑了三个月,误检率比Pytho
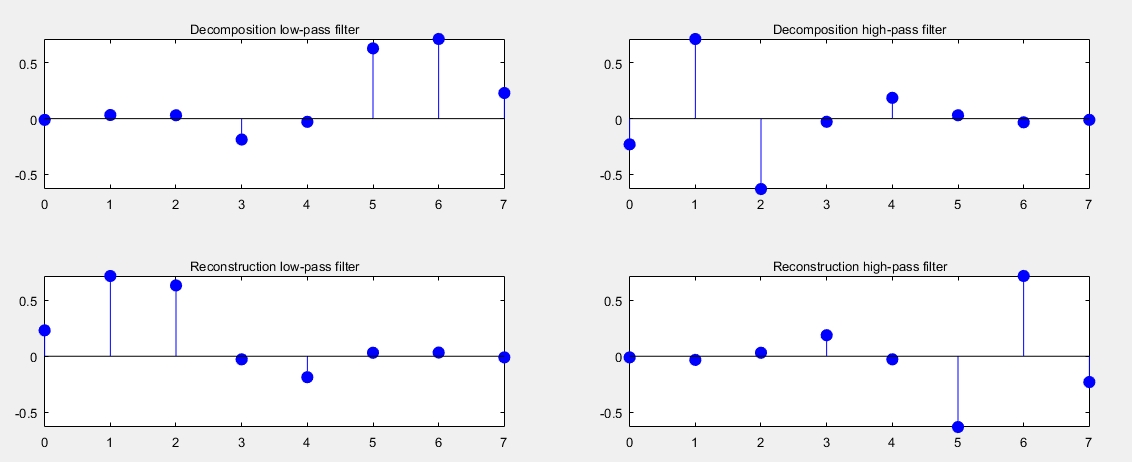
举个栗子,假设你手头有一段心电图信号,高频噪声和低频基线漂移混在一起,这时候直接傅里叶变换就容易翻车——小波可就不一样了,它能同时捕捉时间和频率信息,相当于给信号做了个动态CT扫描。不过别迷信默认参数,实际应用中得根据信号特征调整分解层数——比如处理脑电信号可能需要更多层级,而振动信号可能用symlets基函数效果更佳。上小波分解前得先选个合适的基函数,新手建议从db4开始,这个基函数在医疗信号处
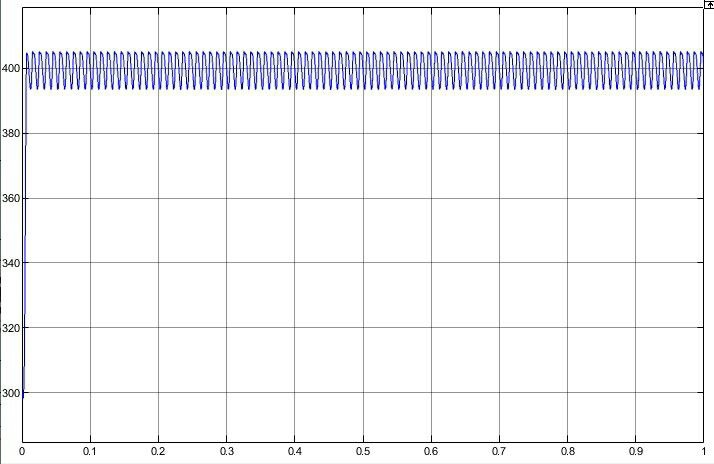
散热片别省料,用带翼片的铝基板直接锁在MOS管上,实测满载温升直降15℃。单周期控制无桥PFC这玩意儿搞电源的工程师都不陌生,但要把2000W功率怼到400V输出还能扛住85V~264V的宽电压输入,这活可不容易。咱今儿就拆解几个硬核设计点,特别是电感和电容这两个关键元件的计算,手把手带代码实操。这MATLAB代码算出纹波电流约3.2A RMS,选电容时必须找纹波电流规格大于4A的型号。这段代码的
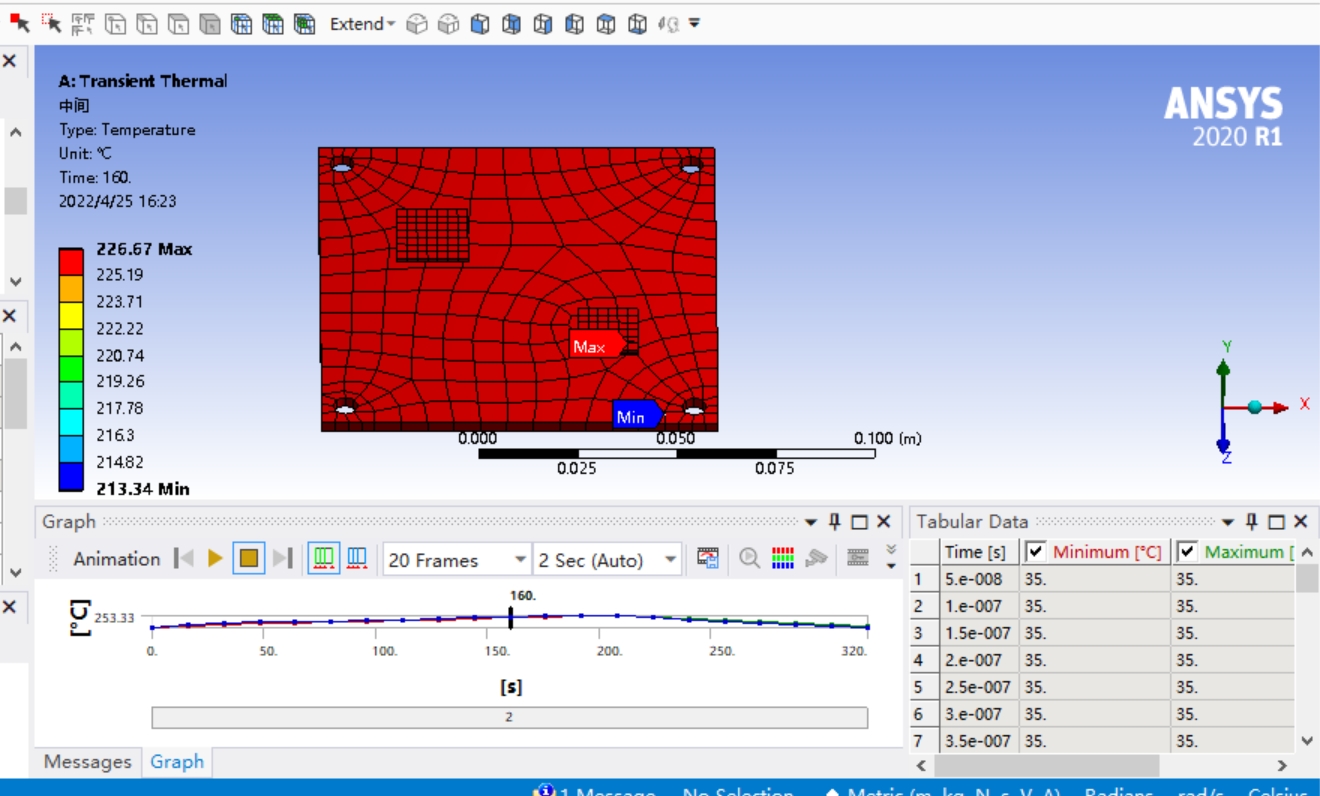
本文档旨在详细说明基于 ANSYS Workbench 构建的“芯片回流焊 + 温度循环热力耦合分析”仿真系统的整体架构、功能模块与工作流程。该系统面向电子封装可靠性工程,通过多物理场耦合仿真技术,精确预测芯片封装结构(如焊球、焊膏、基板、塑封料等)在回流焊工艺及后续温度循环服役过程中产生的热应力与变形行为,为产品设计优化与失效预防提供关键依据。
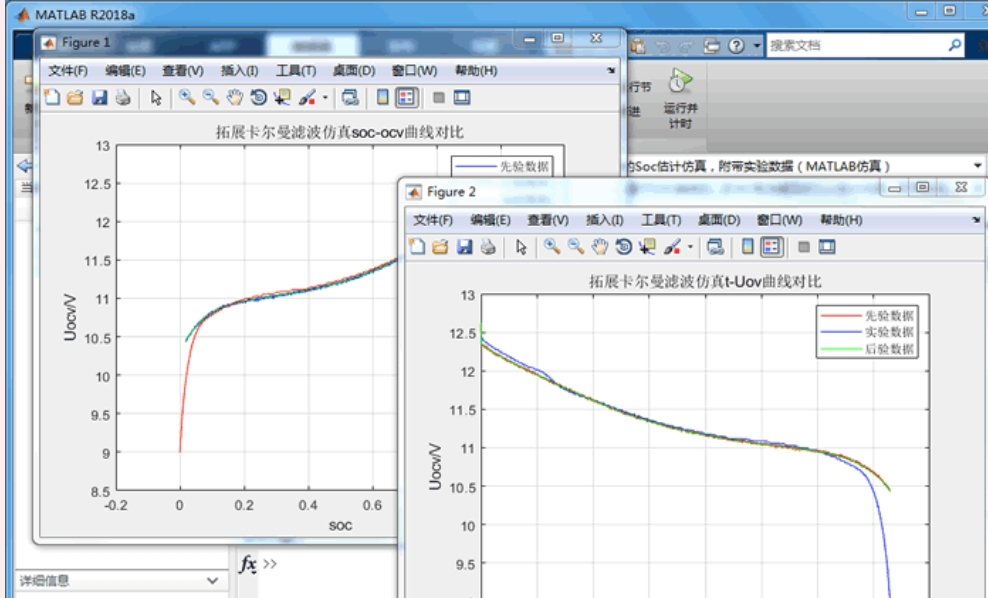
最近在折腾电池SOC估计的仿真,发现二阶RC模型配合EKF滤波的方案效果还不错。这次用MATLAB整了个仿真demo,实测数据来自某款18650电池的HPPC测试,咱们边撸代码边聊实现细节。不过当电流剧烈波动时,估计值会有个0.5%左右的短暂抖动,这跟模型参数辨识精度有关。注意看B矩阵的构造,这里用指数函数处理RC环节的离散化,比直接前向欧拉法更准。但要注意的是,这个结果依赖准确的模型参数,实际应
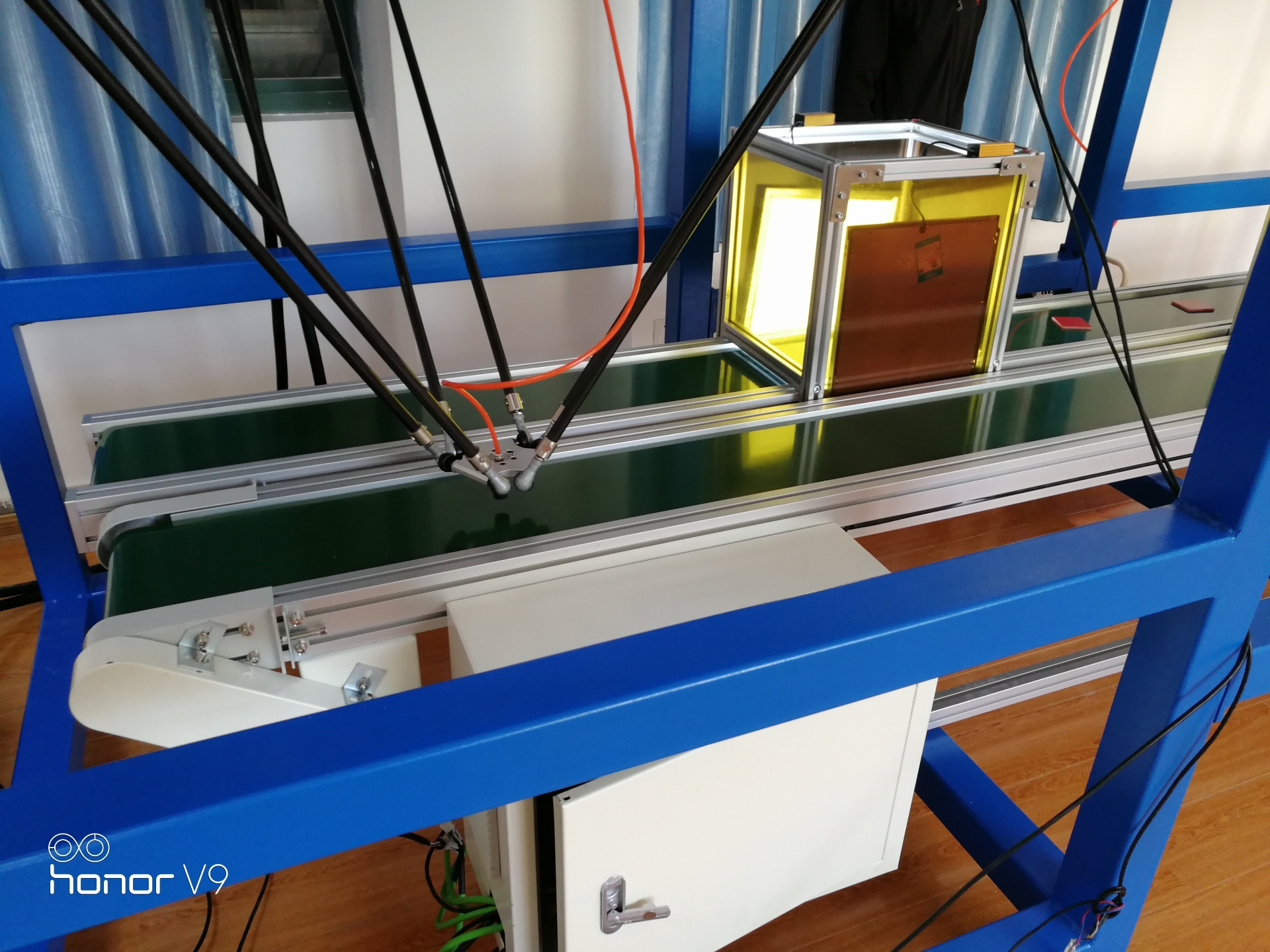
这类由Stewart平台演化而来的精密设备,每个支链都像相互纠缠的藤蔓,把六个伺服电机的转动耦合成了末端执行器的空间芭蕾。但正解才是真正的魔鬼——当六个电机停止转动时,末端的位姿就像被锁在六维迷宫里的宝藏。我们开发了基于运动连续的预测机制——用上一时刻的解作为当前迭代的初始猜测。真正玄妙的是残差函数的设计。六个约束方程不仅要描述支链长度与位姿的关系,还得处理万向节的运动约束。示教器屏幕上的位姿数据
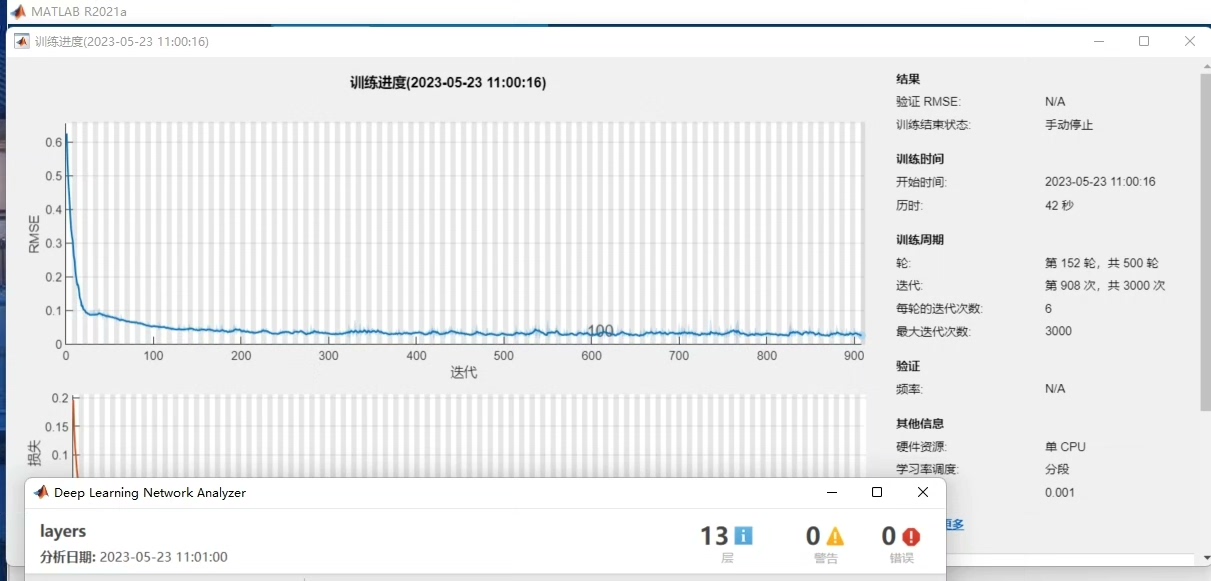
CNN、LSTM、CNN_LSTM时间序列预测(三个模型一起打包)三个模型一起,都是替换excel直接运行即可,可做一个对比实验窗外飘着雨,最适合折腾时间序列预测模型。今天咱们来玩点实际的——把CNN、LSTM以及它们的混合体CNN-LSTM三个模型塞进同一份数据里,直接替换Excel文件就能跑。代码直接怼在Jupyter里,Ctrl+C/V就能用,顺便看看到底哪个模型更抗打。
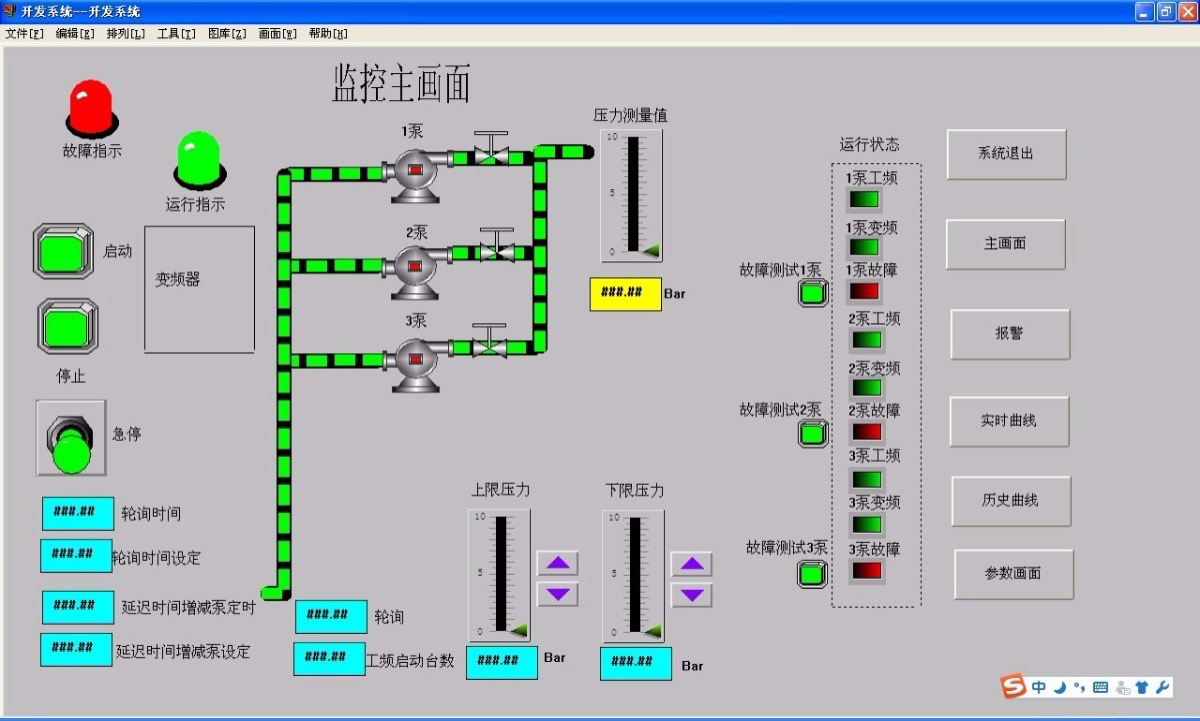
三台变频器的启停信号用Q0.0-Q0.2,频率给定走的是模拟量输出通道AQW0-AQW2。这套系统跑起来后,最明显的变化是电费单——三泵根据压力需求智能切换,比原来工频运行省了快30%的电。不过得定期检查EM235模块的接线端子,上次就因为冷凝水导致模拟量信号漂移,搞得压力值乱跳。今儿给大伙唠唠这个三泵恒压供水的实现套路,特别是那个让人头秃的泵切换逻辑,绝对实战干货。PID参数整定千万别照搬手册,
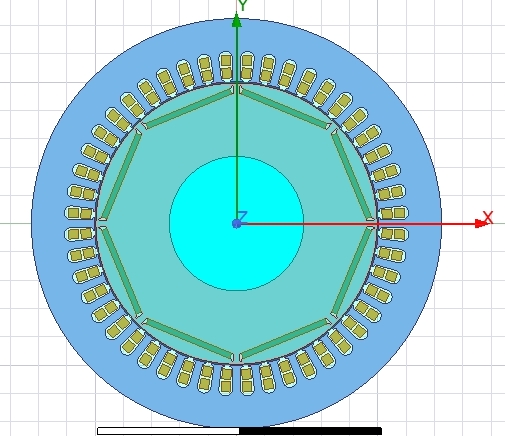
本系统基于非支配排序遗传算法(NSGA-II)构建,实现了与Maxwell电磁仿真软件的实时数据交互,针对电机结构参数进行多目标优化设计。系统通过自动化的参数迭代、仿真分析与结果反馈,在保证优化精度的前提下,显著提升了电机结构设计的效率,适用于需要平衡多性能指标的电磁设备优化场景。核心目标是通过算法驱动的参数寻优,实现电机平均转矩、转矩脉动与齿槽转矩三大关键性能指标的最优平衡。f1:平均转矩的倒数
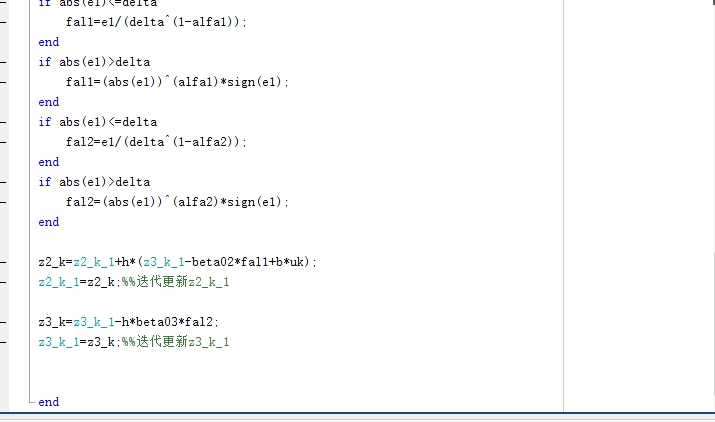
二阶系统的线性自抗扰(LADRC)simulink模型,以及非线性自抗扰(NLADRC)simulink模型,模型加入了扰动(阶跃,正弦),可分析扰动条件下PID与ADRC的对比。俩个模型中复杂模块采用的代码编写,且LADRC进行了改进,加入了TD模块。在控制系统的领域里,自抗扰控制(ADRC)技术近年来受到了广泛关注,它能有效应对系统中的不确定性和扰动。