- @2508_94202947
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
发那科机器人上位机,C#,语音识别控制,FANUC在自动化控制领域,发那科(FANUC)机器人以其高精度和稳定性被广泛应用。今天咱们来聊聊如何通过C#语言开发上位机,结合语音识别技术来控制发那科机器人,这就像给机器人装上了一个“听话的耳朵”,让它能听懂我们的指令。
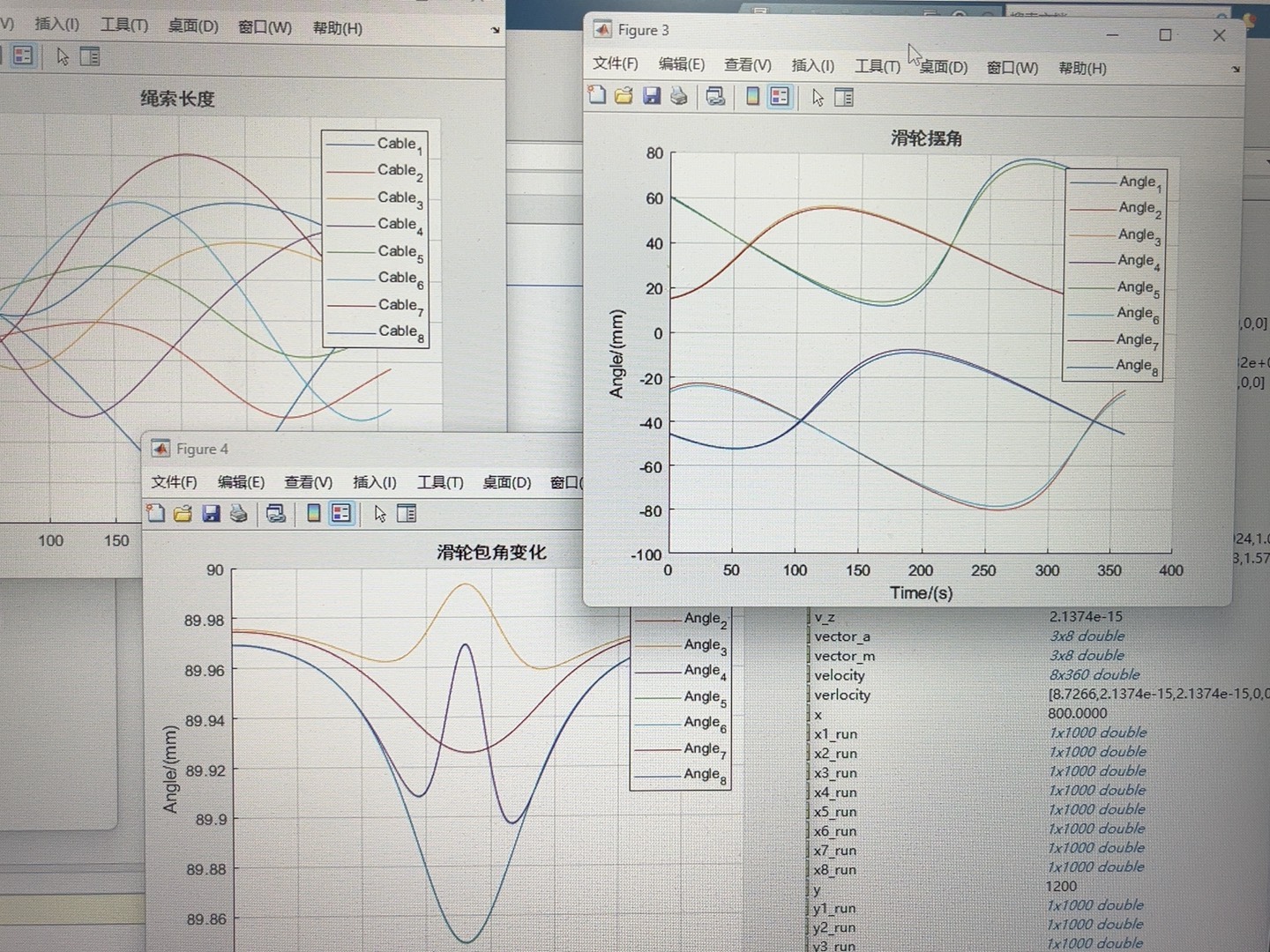
八索并联绳索机器人仿真matlab模型,带出绳点滑轮摆动与俯仰,是运动学模型另外还有正运动学模型,力分配以及动力学模型,可以改最近在研究八索并联绳索机器人,发现它的Matlab仿真模型真是个有趣又充满挑战的领域。今天就来和大家唠唠其中涉及的一些关键模型。
标签管理模块通过「参数-模板-打印」模型,把传统硬编码的标签格式彻底数据化。二次开发时,90% 需求只需修改配置或增加字典项,真正需要编码的场景集中在驱动层新打印机适配。理解上述流程与代码骨架后,可在 1-2 小时内完成新标签上线,显著降低交付成本。C# Winform通用开发框架,支持多语言,多数据库,自动更新,模块化,可用其开发任意CS端系统,非常适合需要快速搭建项目的团队或个人使用。
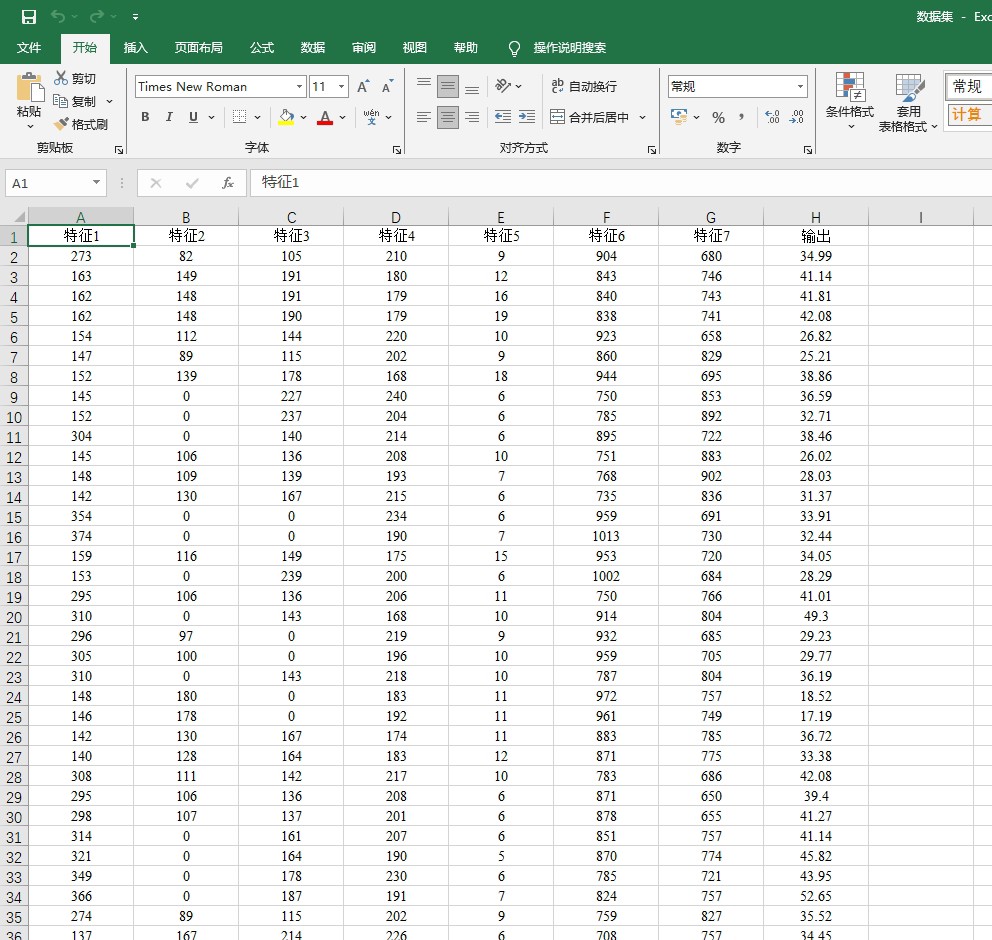
最近在搞时序预测的朋友可能都听说过LSTM的鼎鼎大名,但这种"单打独斗"的模型遇到复杂场景时总有点力不从心。LSTM-Multihead-Attention回归预测 基于长短期记忆神经网络(LSTM)结合多头注意力机制(Multihead-Attention)多变量回归预测[可以修改为时序预测,前]这里有个细节要注意——输入特征和预测目标在滑窗时是错位的,就像看连续剧时用前24集剧情预测第25集发
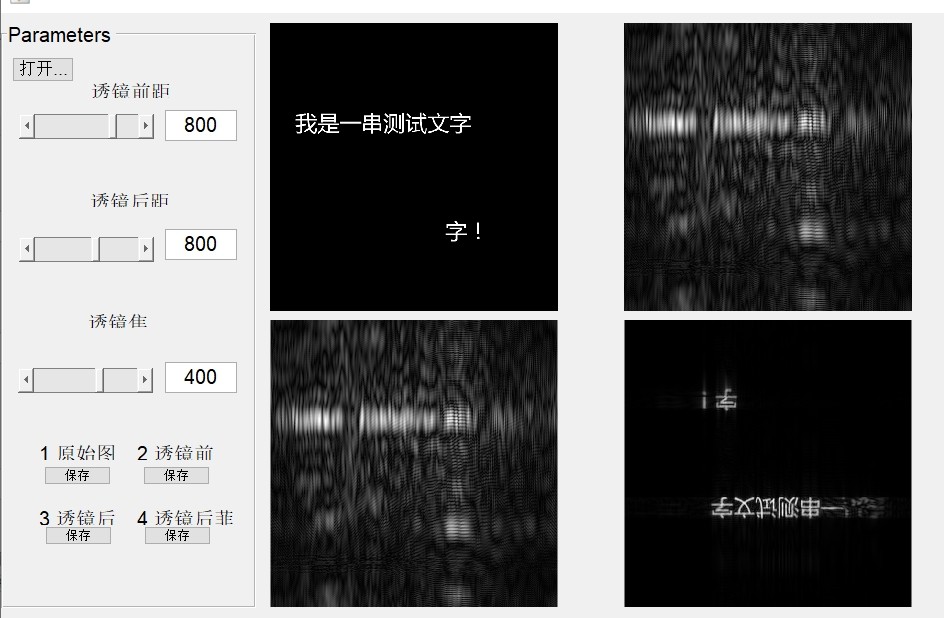
在光学仿真里,4f系统就像个魔术师——它能把输入面的光场在输出面完美重现。但实现这个魔术的关键,是咱们得搞明白光是怎么通过透镜和自由空间传播的。今天咱们用MATLAB扒开这个过程的代码实现,重点聊聊菲涅尔衍射怎么被「掰弯」成傅里叶变换。光学仿真最迷人的地方,就是用复数运算就能模拟真实世界的光线戏法。注意网格步长别太大,否则会出现相位混叠——就像拍高速旋转的电风扇叶片时出现的虚假静止效果。这里有几个
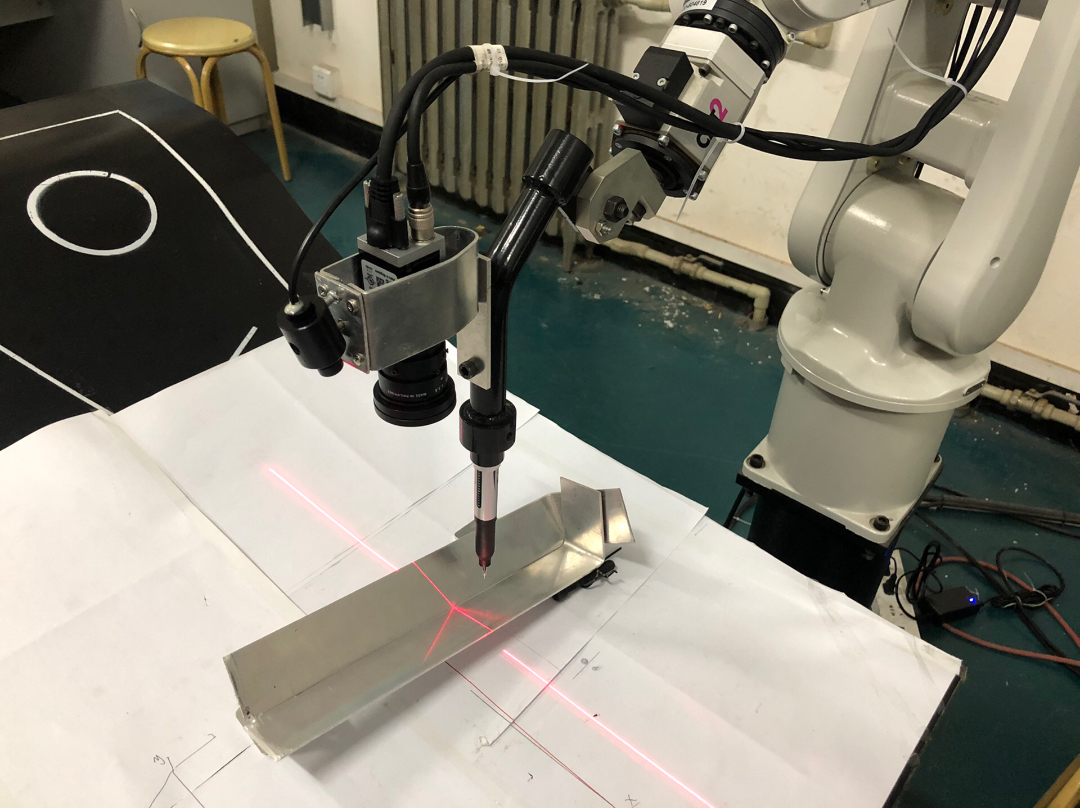
该上位机系统成功实现了视觉引导—特征识别—位姿解算—轨迹规划—机器人控制采用亚像素级激光中心线提取,提升定位精度;创新性地通过向量法解析 V 型焊缝角度,实现焊枪姿态自动纠偏;设计动态拟合+转弯半径的实时跟踪算法,兼顾精度与平滑性;模块化架构便于功能扩展与维护。未来可进一步优化方向包括:引入深度学习提升复杂焊缝识别鲁棒性、集成真实焊接过程中的弧光抑制算法、以及研究热变形补偿模型,使系统更贴近工业现
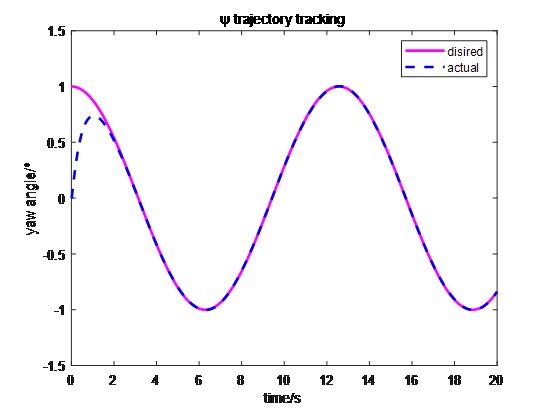
在Simulink里直接拿S-function封装了状态方程,不过老铁们注意看这个骚操作——机器人位姿计算部分其实是用Matlab Function写的,两种实现方式可以像乐高一样随意替换(后面教你们怎么玩这个魔术)。基于Matlab与simulink搭建的六自由度水下机器人运动模型,采用了滑模控制,实现了轨迹无差度跟踪效果,用S-function和Matlab function搭建的,可以互相替
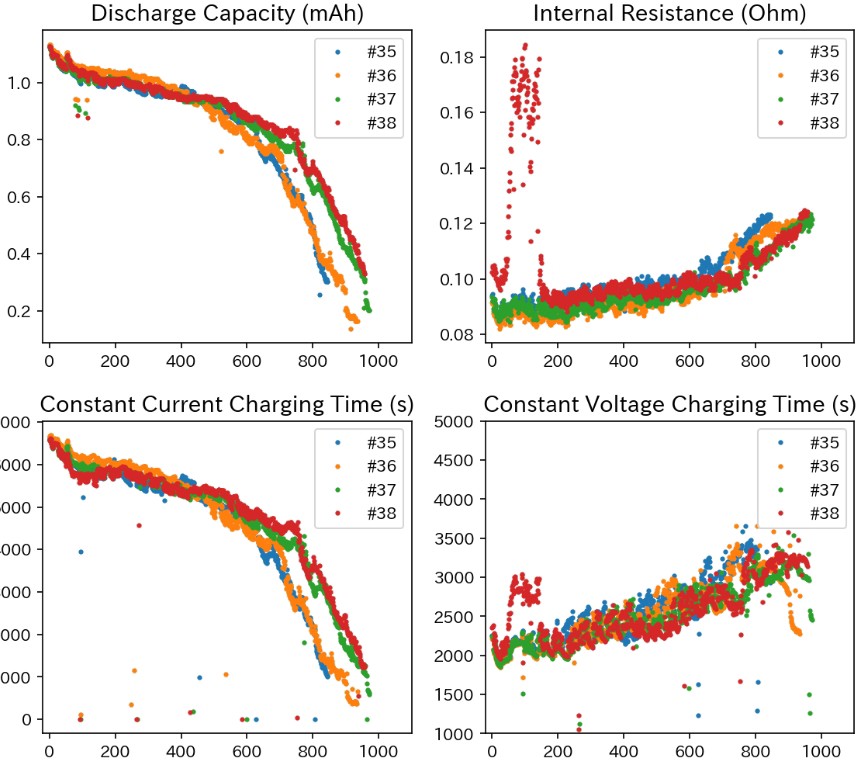
DL00307-基于机器学习的电池寿命预测完整代码含数据集,可直接运行python在当今这个电子设备无处不在的时代,电池寿命的预测变得愈发重要。今天就来聊聊“DL00307 - 基于机器学习的电池寿命预测”项目,这个项目提供了完整代码和数据集,而且用Python就能直接运行,超方便。
这套码垛系统刚完成72小时连续运行测试,操作工老张叼着烟在触摸屏上翻看运行日志:"这PLC程序写得比之前外包的强,注释跟说明书似的,连我这半路出家的都能看懂个七七八八。这些程序里最值钱的其实是注释里的"黑话"——比如某个延时参数标注着"老刘说至少要1.5秒,别改!确实,好的工业自动化程序就像车间老师傅的手艺活儿——既要有实用主义的筋骨,又得藏着工程师的巧思。看着触摸屏上跳动的实时数据,突然觉得PL
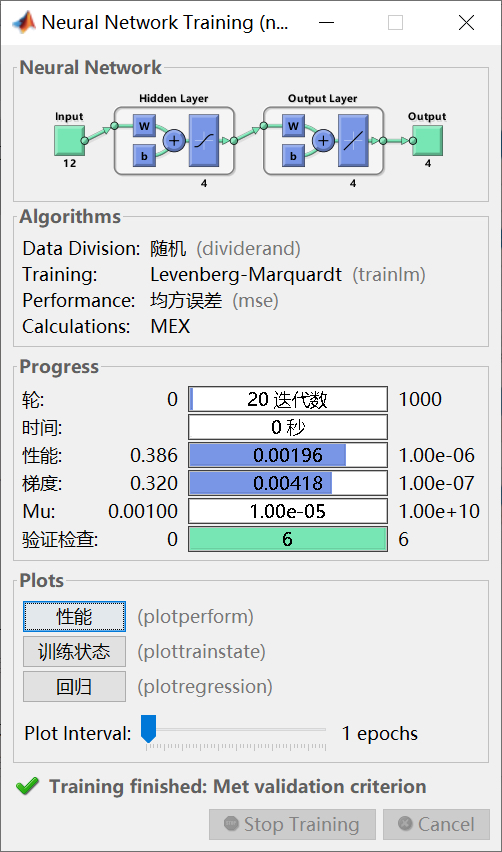
最大训练次数% 学习率% 隐藏层节点数这里定义了几个重要的超参数。最大训练次数就像是规定了学习的总时长,学习率决定了每次学习前进的“步子”大小,隐藏层节点数则影响着神经网络的复杂度和学习能力。