- @2507_93747238
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
std::cerr << "复制失败: " << fileEntry.path() << " 原因: " << e.what() << std::endl;std::cout << "已提取: " << methodName << " / " << fileName << std::endl;std::cerr << "复制失败: " << fileEntry.path() << " 原因: "
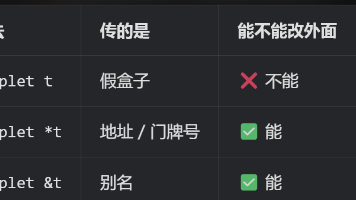
C语言函数传参核心规则:永远传值(传副本)。文章解析了三种结构体传参方式:1)传值(复制结构体,无法修改原数据);2)传指针(通过地址直接修改原数据,需用->访问成员);3)传引用(C++特性,C语言不可用)。重点强调:要修改原数据必须传指针,不修改则传值即可。底层原理是函数参数会创建独立内存副本,修改副本不影响原变量。
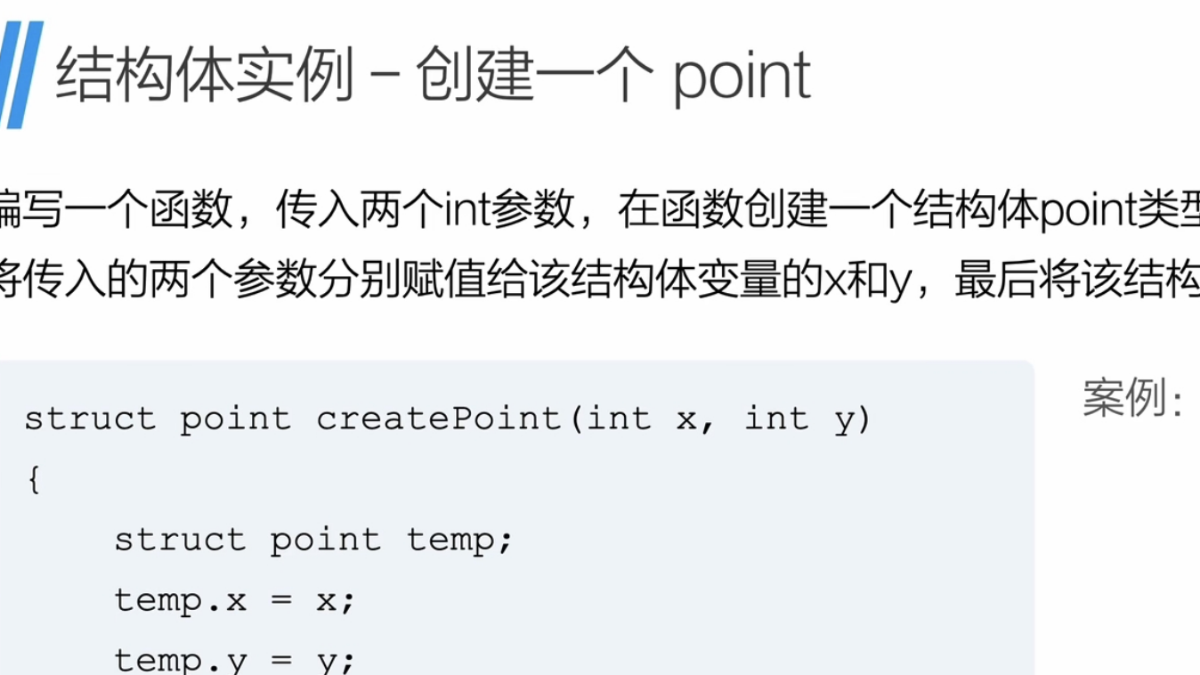
现在, zhangsan就是一个“学生”包裹,里面有id 、 name 、 age 、 score四个格子,但现在都是空的。这样,我们就创造了一个叫struct Student的新类型,它可以用来描述一个学生的所有信息。定义结构体,就是在告诉编译器:“我要创造一个新的‘包裹’,它的名字叫什么,里面要装些什么东西。你可以把结构体理解成一个**“自定义的变量类型”,或者更形象一点,一个“小包裹”**。
时间复杂度是衡量算法执行效率的关键指标,关注输入规模n趋近无穷大时操作次数的增长趋势。其核心原则是:忽略常数和低阶项,保留最高阶项(如n²+n→O(n²))。常见复杂度类型包括常数级O(1)、线性O(n)、对数O(log n)等。判断方法主要分析代码结构:顺序结构为O(1);单层循环若迭代次数与n成正比则为O(n),若循环变量呈指数变化(如翻倍)则为O(log n)。这种抽象化的评估方式能有效反映
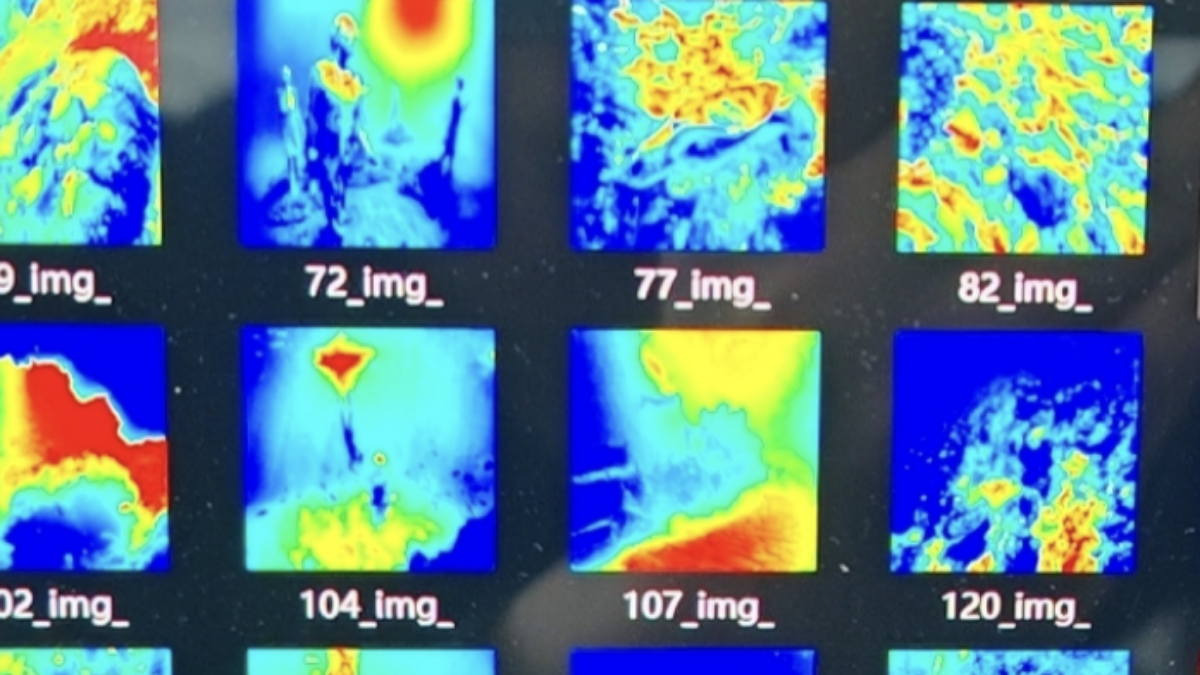
IR‑CEF框架的核心,就是把因果归因、对抗净化、特征校准三个模块结合起来,输入图像后,先找决策关键区域、识别伪特征,再净化干扰,最后校准特征,输出结果的同时给出解释,全程兼顾可解释性和鲁棒性。这次做因果归因,也是用类似的思路,把模型决策的“关键区域”找出来。基于平均处理效应(ATE),把图像分成多个超像素区域,逐个区域做掩码处理,对比掩码前后模型输出的变化,变化大的就是对决策贡献高的区域,再生成
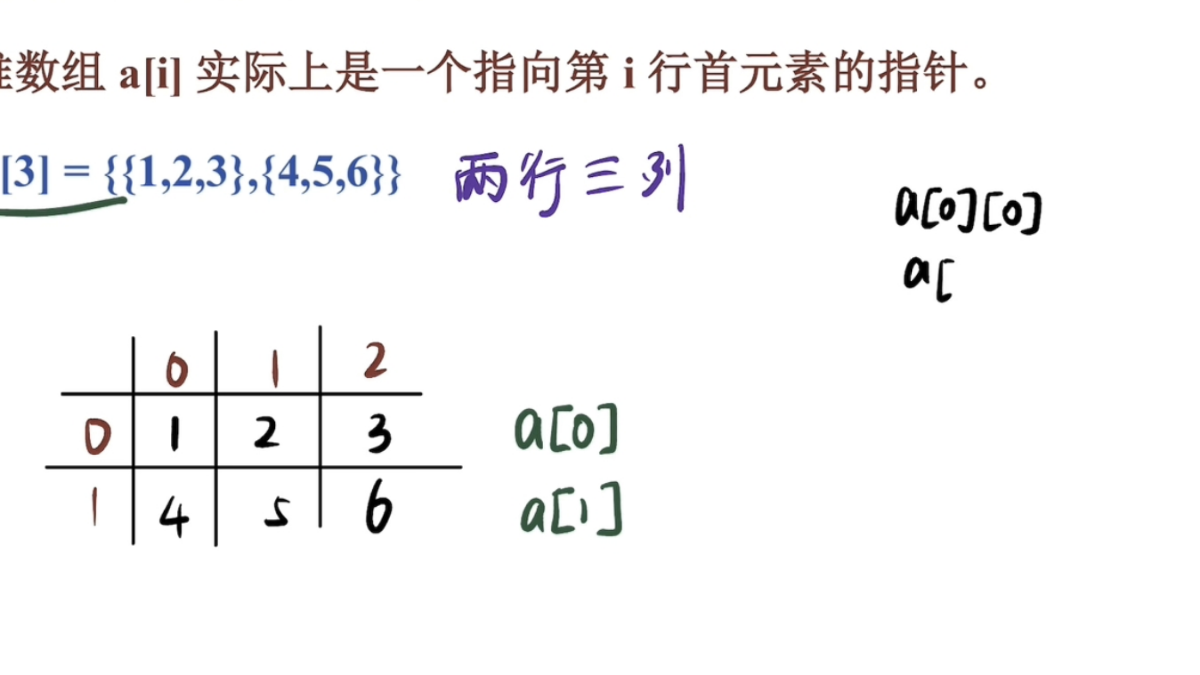
想拿第一行第二个数(2):先通过 a[0] 找到第一个小房间,再往后数1个柜子,即 *(a[0]+1) (也就是 a[0][1] )。// 看p上记的门牌号(和a的地址一样)-a[0] 是第一个小房间的门牌号(指向第一行首元素), a[1] 是第二个小房间的门牌号;// 定义指针p,存a的地址(把a的“门牌号”写在p上)// 验证a的值变了。a的地址:0x7ffee3b5c8ac // 你的电脑显
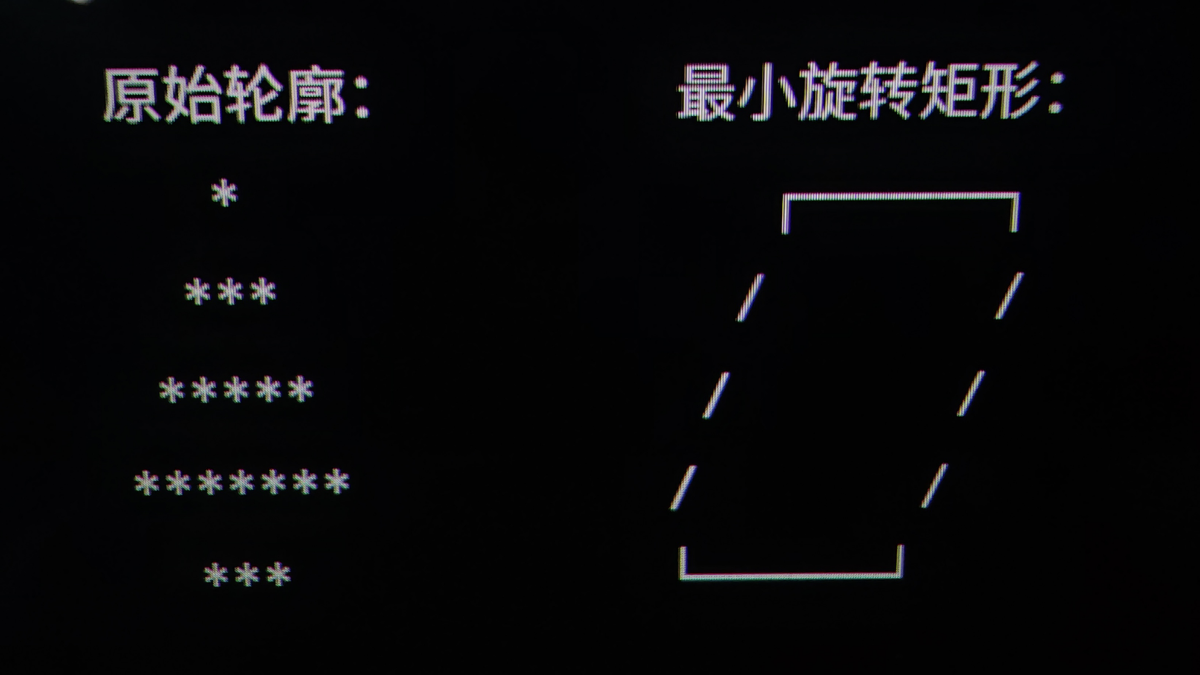
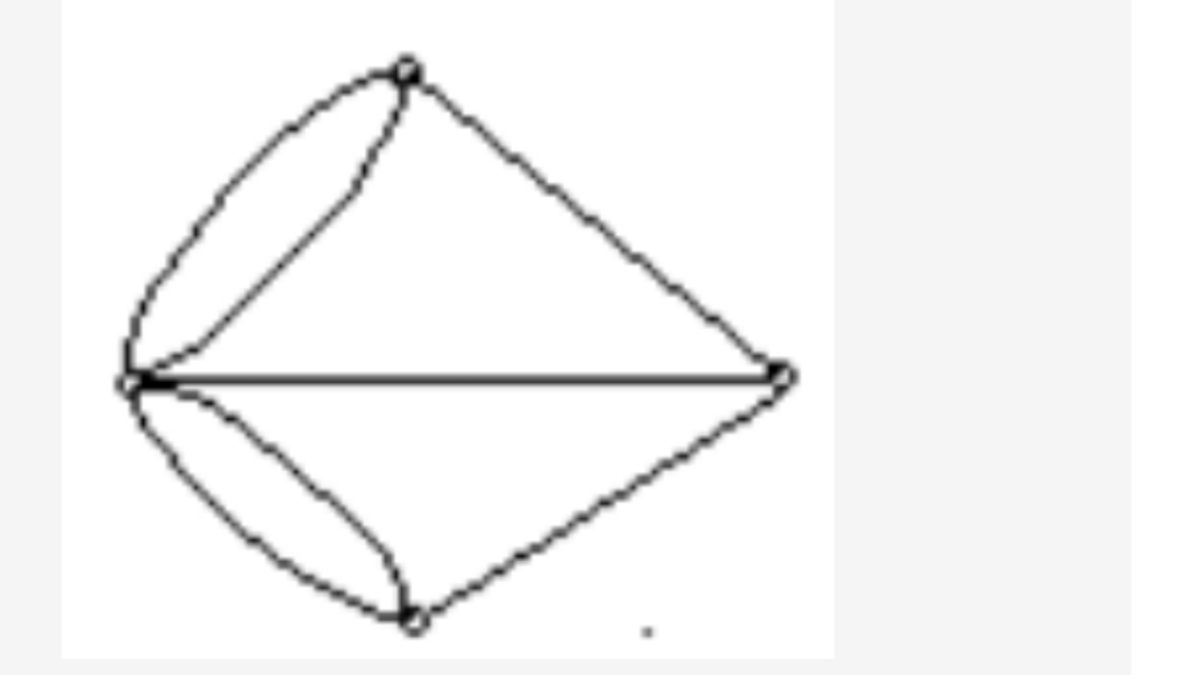
然后它们的函数分别,检测模式的函数是RETR_EXTERNAL.然后它的逼近方法是chain Approx Sample。RETR_EXTERNAL是只检测最外层轮廓的,所以我们可以把二值化中的大黑图中提取到白色图案中的轮廓,它是由一个个像素点构成的,也就是白色区域的边界点。在绘画矩形的时候,我们又根据二值化findContours给出的,输入给我们的点来画,然后我们就会得到它的width、它的h