- @2504_94303570
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
DL00105-PECNet的行人轨迹预测python实现对PECNet进行了稳健性分析,自动驾驶汽车的行人轨迹预测系统,具有各种聚类分析、新颖的指标分布分析和分类。使用合成的数据增强技术,范围从牛顿力学到基于深度强化学习的模拟改进和测试系统。还将系统解耦,并与其他实验一起进行各种消融研究,位移误差 (FDE) 指标降低 9.5%。在自动驾驶的世界里,准确预测行人的轨迹就像是给汽车装上了一双“透视
最近在折腾标签打印系统的时候,发现CODESOFT这玩意儿对C#开发者是真香。特别是需要给产线做定制化打印工具的场景,直接拿它的COM组件撸代码,比从零造轮子省事太多了。先上段硬核操作——用C#动态替换标签里的图片,这需求在产线换标时绝对高频。下次打算试试用Blazor搞个网页端配置界面,毕竟.NET全栈才是终极奥义。搞完这些再套个WPF的MVVM框架,配合Prism的事件聚合器,轻松实现多终端同
开发中遇到的坑:PC SDK的文档真是一言难尽,多试试API返回值。实时监控超过20个变量时建议分组处理,别把控制器搞崩了。最后提醒,生产环境一定要加异常恢复机制,机器人一动起来可没Ctrl+Z的机会。StartWatching的参数别设太小,机器人控制器扛不住高频请求。先装个NuGet包ABB.Robotics.Controllers.PC,这是PC SDK的命根子。这段代码扫局域网里的ABB控

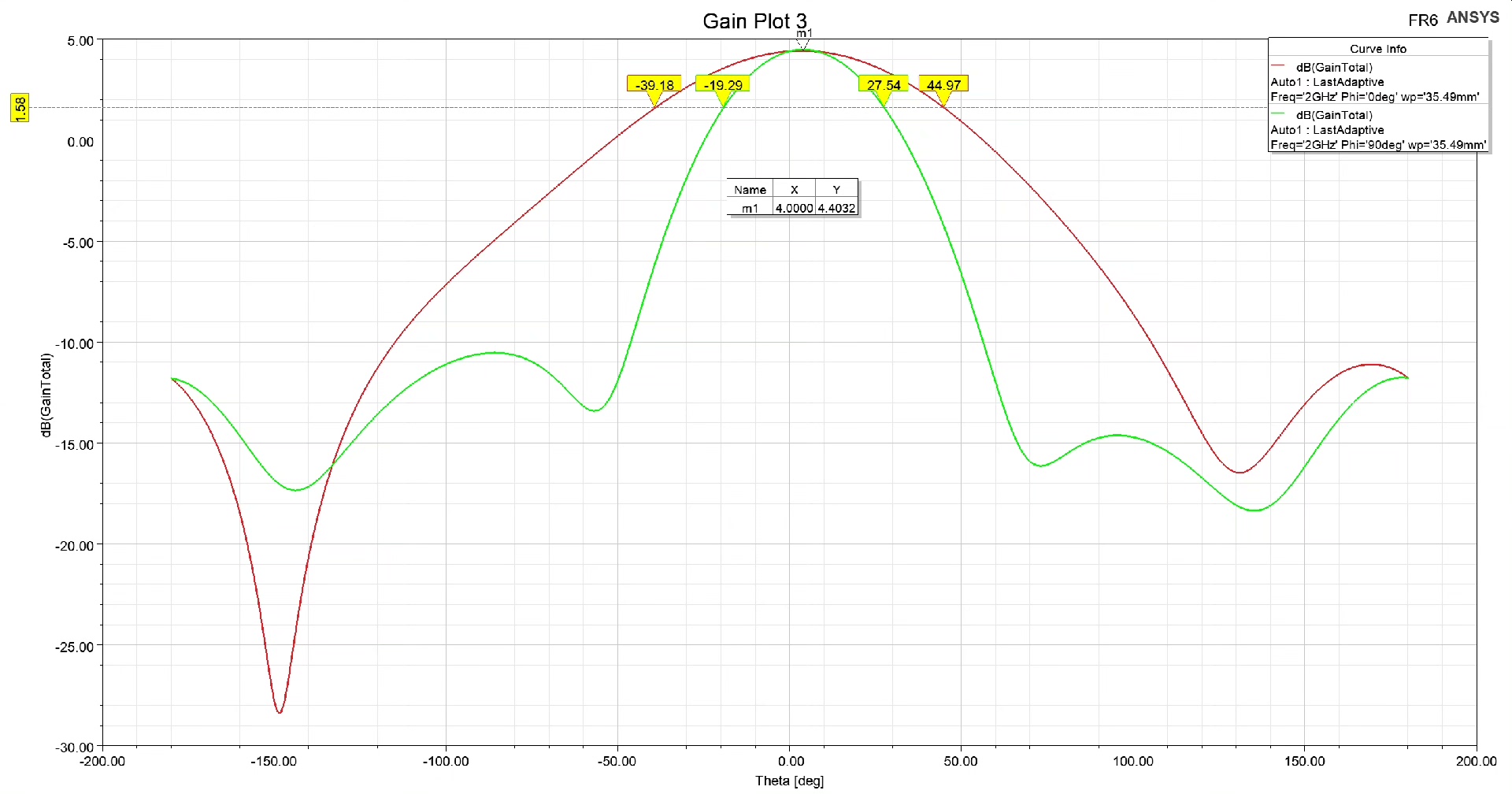
最终模型在26cm×18cm的FR4板上实现了4.7dBi增益(比预期高0.2),驻波曲线在2GHz处1.42。先说个有意思的现象:同样的阵列布局,用不同批次FR4板实测结果能差0.3dBi增益,介电常数波动坑人不浅。毕竟FR4的脾气你懂的,同一块板子不同区域介电常数都能差个0.1,多加点参数化变量能救命。有个坑要注意:FR4的损耗角正切约0.02,高频下损耗明显,直接导致阵列效率下降。2GHz微
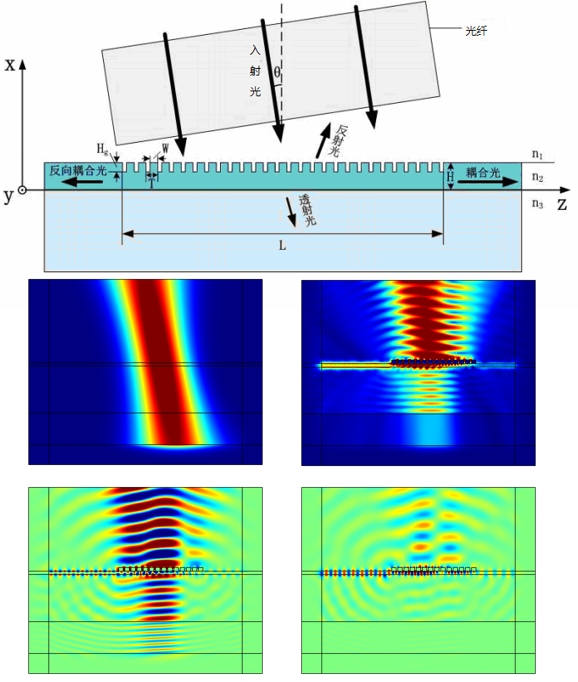
Comsol光栅波导耦合器,耦合效率计算。经典复古小案例。在光学领域,光栅波导耦合器是实现光信号高效传输与转换的重要组件。今天咱们就来聊聊用Comsol计算光栅波导耦合器耦合效率这个经典又复古的小案例。
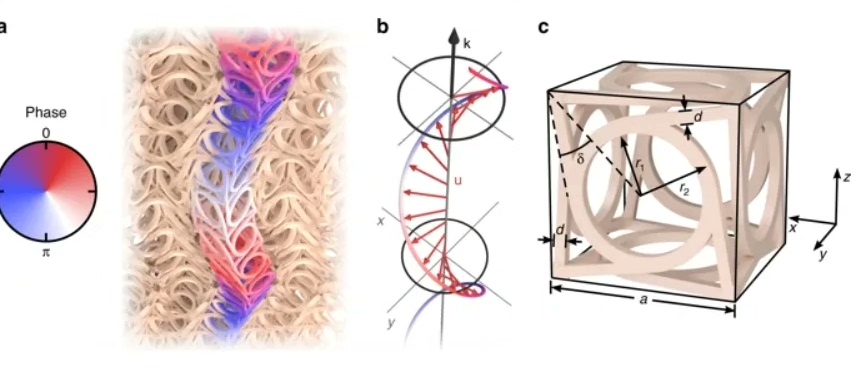
Comsol多孔吸声仿真计算,jca模型,孔隙率,流阻率,曲折度,热特征长度,粘性特征长度。在声学材料研究领域,多孔材料的吸声性能一直是热门话题。而Comsol作为一款强大的多物理场仿真软件,为我们研究多孔吸声提供了有力工具。今天咱们就聊聊基于Comsol的多孔吸声仿真计算,特别是其中用到的JCA模型,以及与之紧密相关的孔隙率、流阻率、曲折度、热特征长度和粘性特征长度这些关键参数。
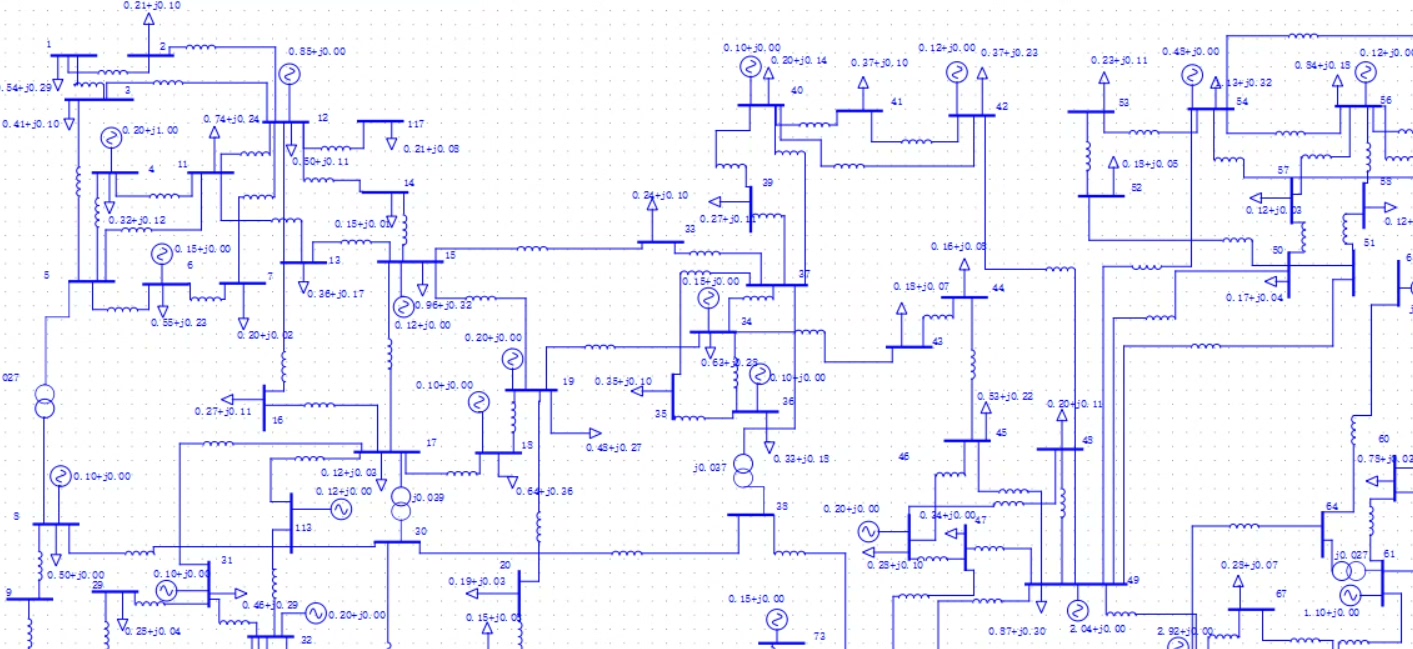
首先,这个模型的基础是IEEE118节点系统,这是个经典的电力系统测试案例,用来模拟电力网络的运行情况。总的来说,加了新能源风机和光伏的IEEE118节点系统模型,可以进行从潮流计算到电能质量分析的各种电力系统分析。模型可进行潮流计算,最优潮流,短路计算,暂态稳定性分析,小干扰稳定性分析,电压频率稳定分析,电能质量分析等等等等。模型可进行潮流计算,最优潮流,短路计算,暂态稳定性分析,小干扰稳定性分
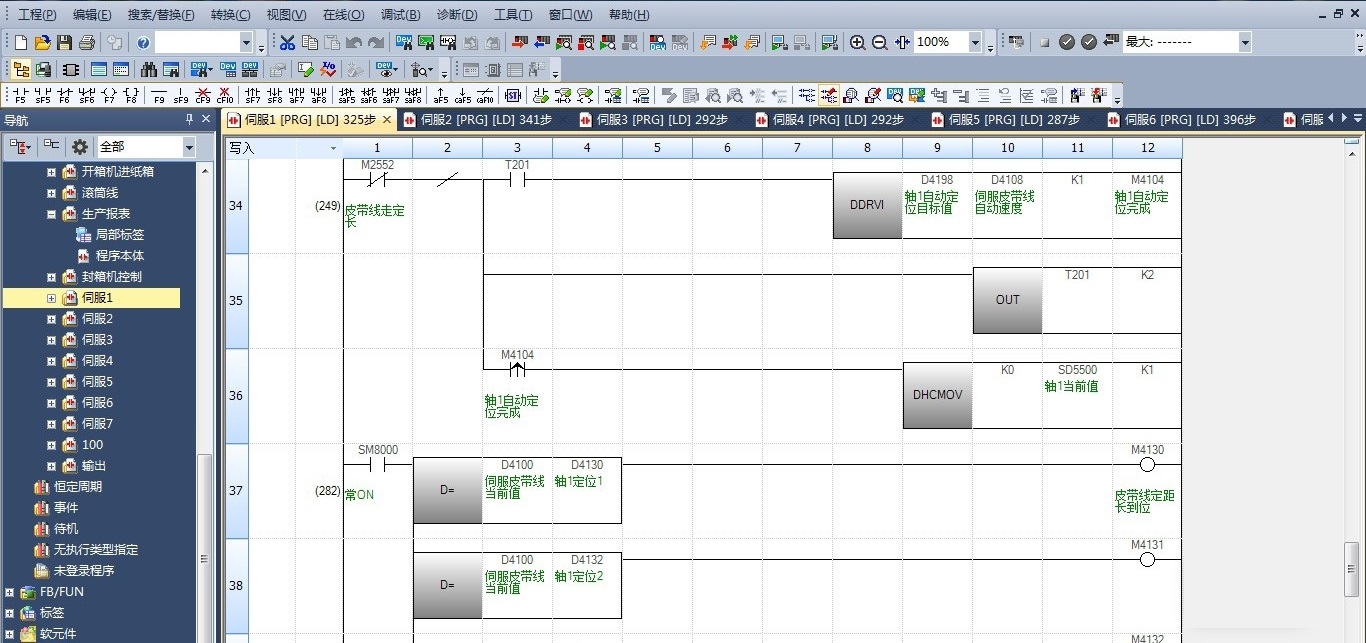
三菱FX5U七轴标准程序,包含轴点动,回零,相对与绝对定位,整个项目的模块都有:主控程序,复位程序,手动,生产计数,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了;通过以上几个模块的讲解,我们详细分析了三菱FX5U七轴标准程序的核心逻辑和实现方式。本文主要讲解三菱FX5U七轴标准程序的结构与实现方式。通过本程序的讲解,大家能够快速掌
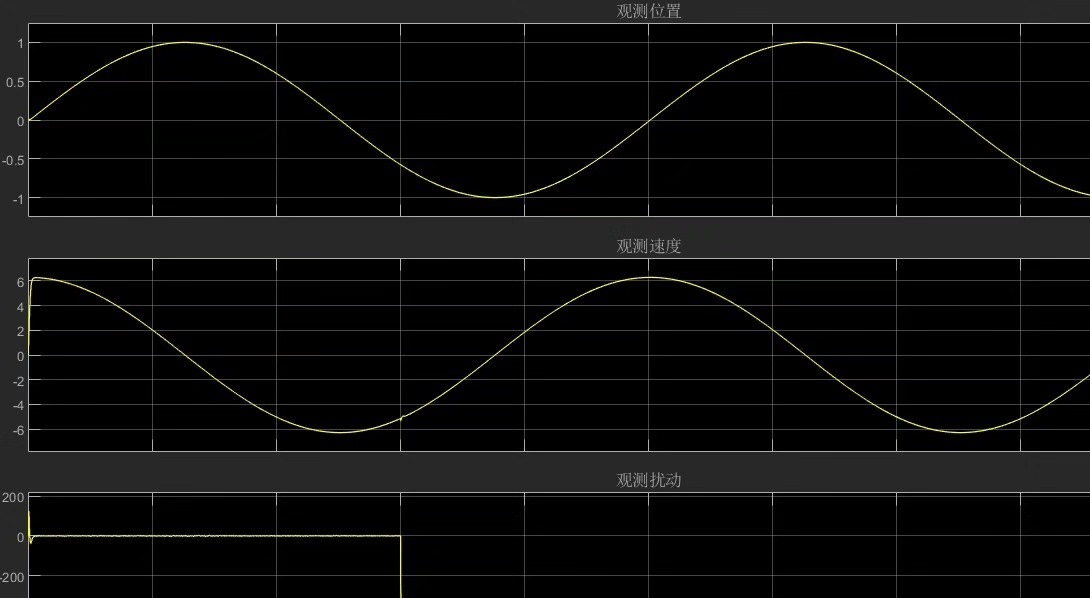
该模型采用位置电流双闭环控制结构,其中位置环采用二阶LADRC,电流环采用PI控制。通过Matlab R2018b的Simulink环境搭建,并采用离散化仿真方式,使得模型更接近实际情况。在负载变化的情况下,该模型能够保持系统的稳定运行,展现出良好的鲁棒性和拓展性。为了更好地理解和优化其控制策略,本文将介绍一个基于线性自抗扰控制(LADRC)的PMLSM的Simulink仿真模型。该仿真模型采用位
自动驾驶控制-基于运动学模型的LQR算法路径跟踪仿真matlab和simulink联合仿真,运动学模型实现的lqr横向控制,可以跟踪双移线,五次多项式,以及其他各种自定义路径。效果如图,几乎0误差,双移线路径误差在0.05m以内。最近玩了玩自动驾驶控制里基于运动学模型的LQR算法路径跟踪仿真,感觉超有意思😎。先说说这个仿真用到了Matlab和Simulink联合仿真。在运动学模型实现的LQR横向