- @2504_94300549
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
别问为啥收费,你试试通宵帮人配环境就懂了——时间才是最贵的成本。简单问题我咸鱼看到了就免费回答,不会运行的我指导你动手200,再懒一点的远程帮你搭开发环境的500,再土豪一点啥都不想动的1000包你生产环境可用。用ThreadLocal存商户ID,后面Service层直接取就行,比传统方案省了80%的重复代码。用枚举自带的状态机比第三方库清爽得多,改业务流程就跟搭积木似的。云打包直接出安卓/iOS
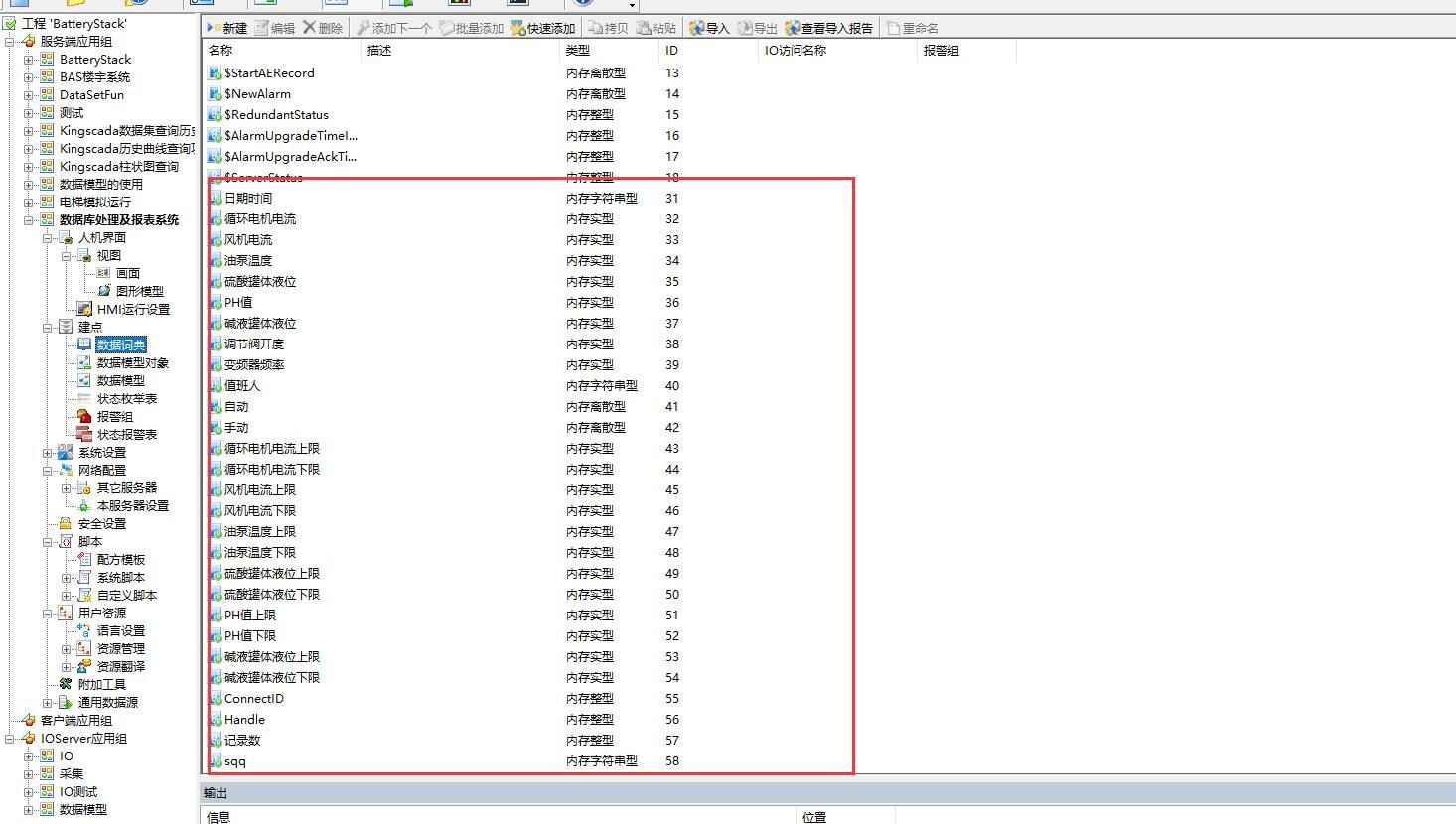
kingscada链接外部数据库处理以及报表系统,案例涉及到数据记录插入数据库的脚本实现方法,数据查询条件的选择脚本实现,数据的展示控件使用,系统中涉及的控件有:日期时间控件、多功能树型控件、listview控件、数据集函数的使用,系统配备mysql数据库,通过odbc与上位机链接。报表模块其实可以配合水晶报表直接读取数据集,但更骚的操作是用KingSCADA的画面窗口+HTML控件,直接ajax
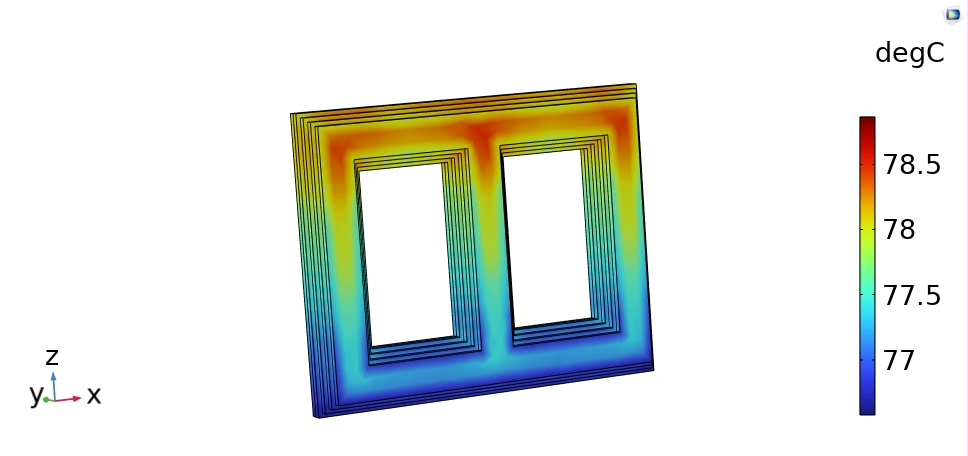
前两天刚折腾完一个油浸式变压器的全耦合模型,电磁场、损耗、温度场、流体搅和在一起,那酸爽谁做谁知道。咱今天就掰开揉碎了聊聊这里头的门道。最后说个实战技巧:在材料属性里加温度依赖函数时,别直接用T变量,改成T-T_ref的形式能避免迭代发散。关键参数别瞎填,特别是绕组材料的非线性B-H曲线(别用默认的线性近似,真会翻车)。算完磁场别急着收工,损耗分布得用后处理里的焦耳热生成器抓出来,这个热源分布可是
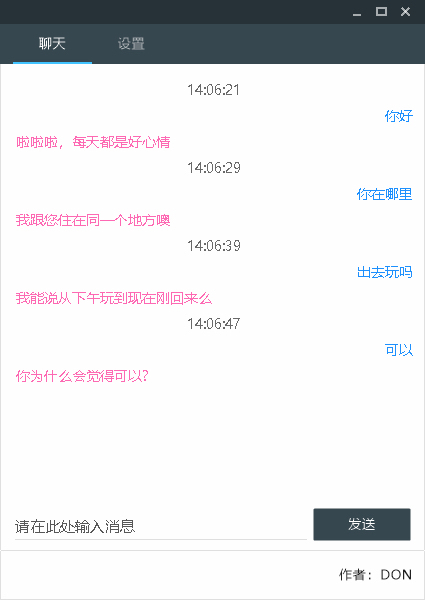
咱们用C# Winform搞这个特别方便,不信你看——我桌上这台扫码枪连着工控机,每次扫到条形码就自动报价格,背后就是基于System.Speech玩的花活。这套架构最大的优势是扩展性强——昨天刚给某超市扫码系统加了滞销品提醒,就是在特征识别结果里加了个保质期判断。现场工程师反馈说,原来需要低头看屏幕的活,现在听着语音就能分拣,效率直接翻倍。C# Winform文字转声音,智能机器人语音对话,文字
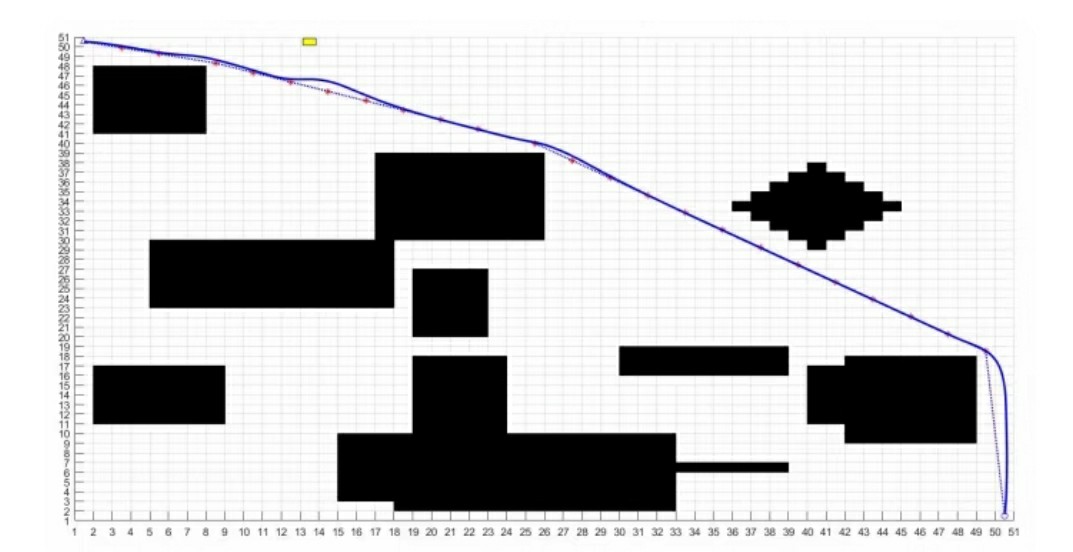
代码里那些魔数参数建议做成可配置项,不同场景下调参能救大命——别问我怎么知道的,说多了都是泪。这种航点跟随策略能让机器人沿着全局路径走,遇到障碍时DWA会自己绕开,绕过后又能找回原路线。就像GPS导航的"您已偏航,正在重新规划"——不过咱们这是自动纠偏不用重新算全局路径。的全局路径喂给DWA。咱们在DWA的heading计算里,不是直接朝向终点,而是朝着A。在20x20的栅格地图里,设置8字形障碍
在车间里折腾PLC项目这么多年,这次碰上个硬茬子——14台发那科机器人带着三个变频器转台跳集体舞,130多个气缸玩阵列表演,这阵仗够刺激吧?提醒各位看官,这程序用了西门子最新的防篡改加密,盗版狗慎用——别问我咋知道的,某客户用破解版差点把转台甩飞了...调试时候发现个坑——机器人上电报文有3秒延迟,愣是加了上电解锁才搞定。每个气缸都是这个FB的实例,配上结构体数组管理,130个气缸的代码量还没人家

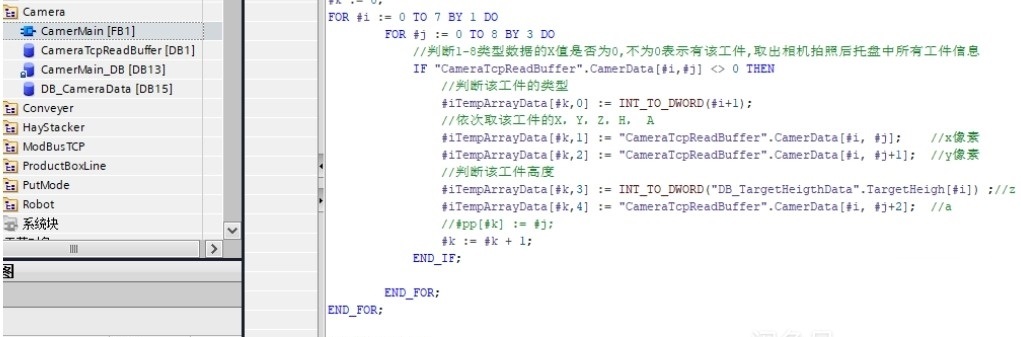
这套系统现在跑得贼溜,但联调阶段简直是地狱模式——视觉坐标系和机械臂坐标系得做旋转补偿,码垛机的托盘尺寸突然变更导致位置重算,还有最要命的通讯丢包问题。两台PLC1215配TP700触摸屏,带着基恩士视觉、ABB机械臂、四台G120变频器还有伺服轴蹦迪,这酸爽必须记录下。这种混编模式充分发挥各自优势——逻辑控制用梯形图直观,算法计算用SCL高效。注意工艺对象的状态位处理,Execute信号必须用到
别问为啥收费,你试试通宵帮人配环境就懂了——时间才是最贵的成本。简单问题我咸鱼看到了就免费回答,不会运行的我指导你动手200,再懒一点的远程帮你搭开发环境的500,再土豪一点啥都不想动的1000包你生产环境可用。用ThreadLocal存商户ID,后面Service层直接取就行,比传统方案省了80%的重复代码。用枚举自带的状态机比第三方库清爽得多,改业务流程就跟搭积木似的。云打包直接出安卓/iOS
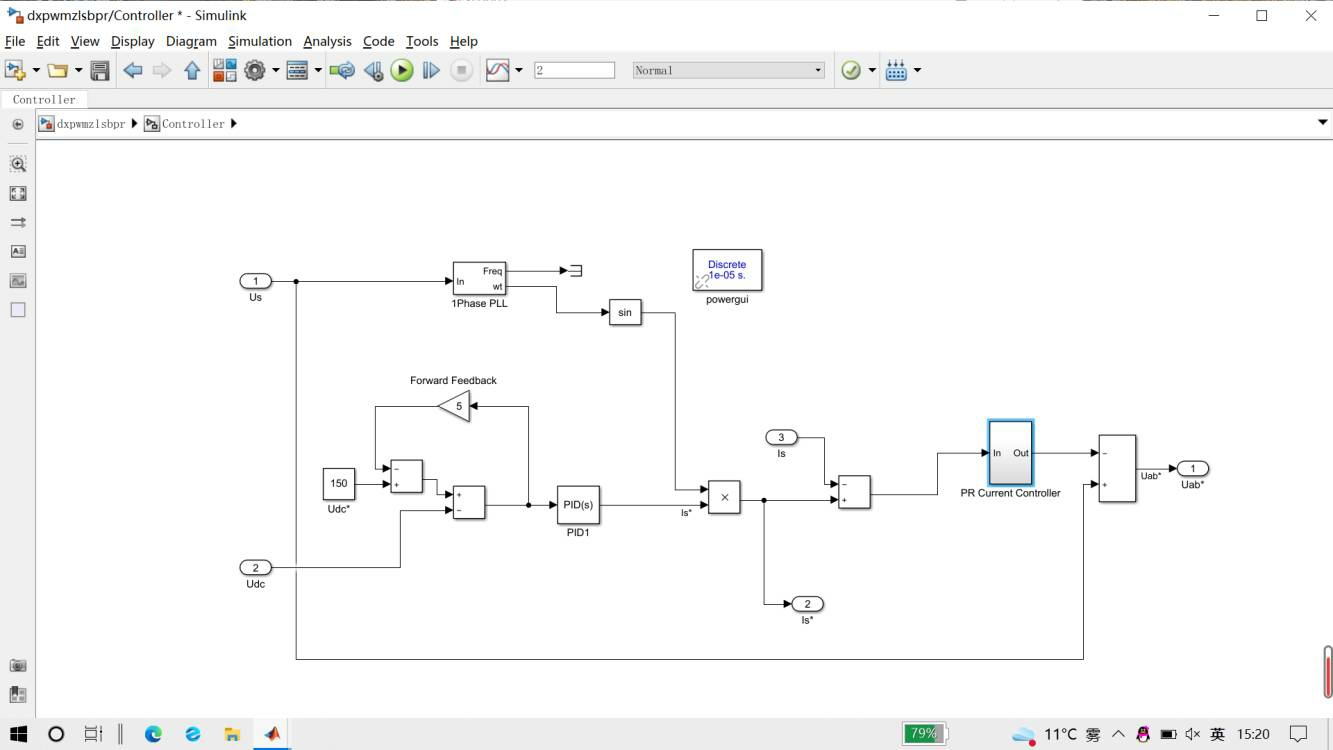
直接拿电阻突加实验说话——直流侧电压纹丝不动,交流电流还能和电压同相位,这就叫闭环控制的硬实力。电压环用PI,电流环上PR,这套组合拳可不是随便选的。秘密藏在电流环的快速响应——PR控制器的误差放大直接让IGBT的PWM占空比暴增,电感电流飙升速度比猎豹还快。中断服务程序里把ADC采样、控制算法、PWM更新这三个动作压缩在50μs内完成,秘诀是用Cortex-M7内核的双精度浮点加速器——别再用定
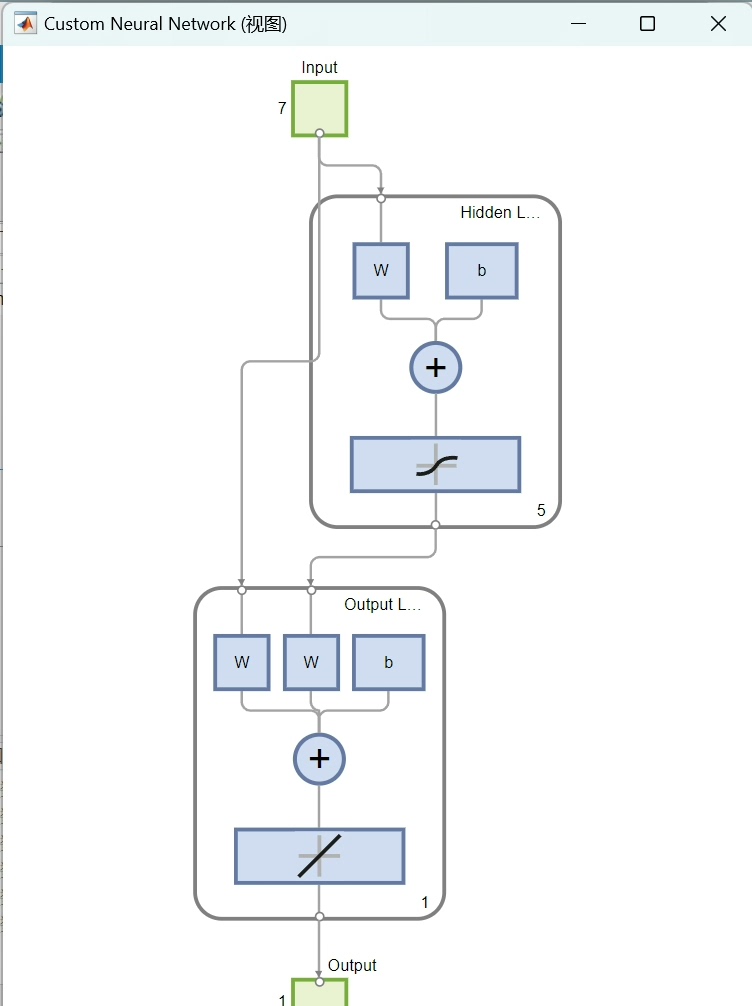
CFBP神经网络是一种在前馈神经网络基础上发展而来的结构。它的独特之处在于其神经元是逐步添加到网络中的,根据网络的性能需求动态增加,不像传统前馈神经网络需要预先设定好所有的网络结构。这种级联的方式使得网络在训练过程中能够更灵活地学习数据的复杂模式,从而有可能提升预测的准确性。