- @2504_94287181
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
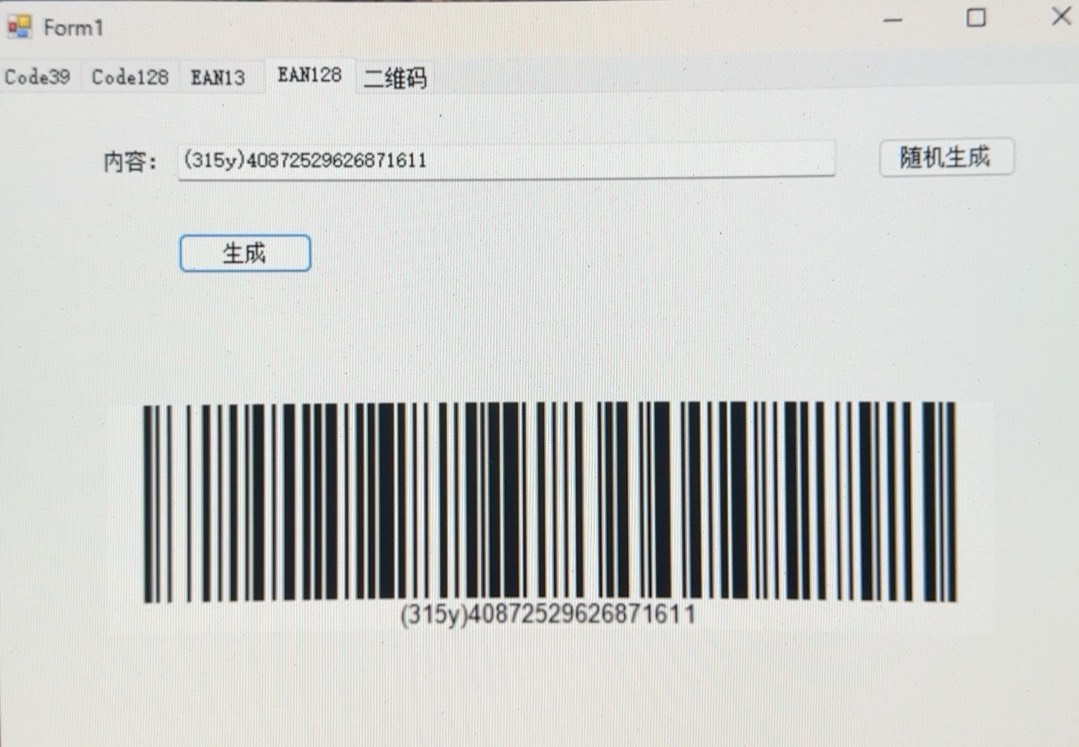
C#条形码、二维码图片生成类源代码Code39条码、Code128条码,EAN13条码,EAN128条码,二维码生成支持指定生成的图片大小可再扩展嘿,各位C#开发者!今天咱来聊聊在C#里生成条形码和二维码图片的事儿。我会给大家分享一个超实用的C#条形码、二维码图片生成类的源代码,这里面涵盖了Code39条码、Code128条码、EAN13条码、EAN128条码,还有二维码的生成,而且还支持指定生成
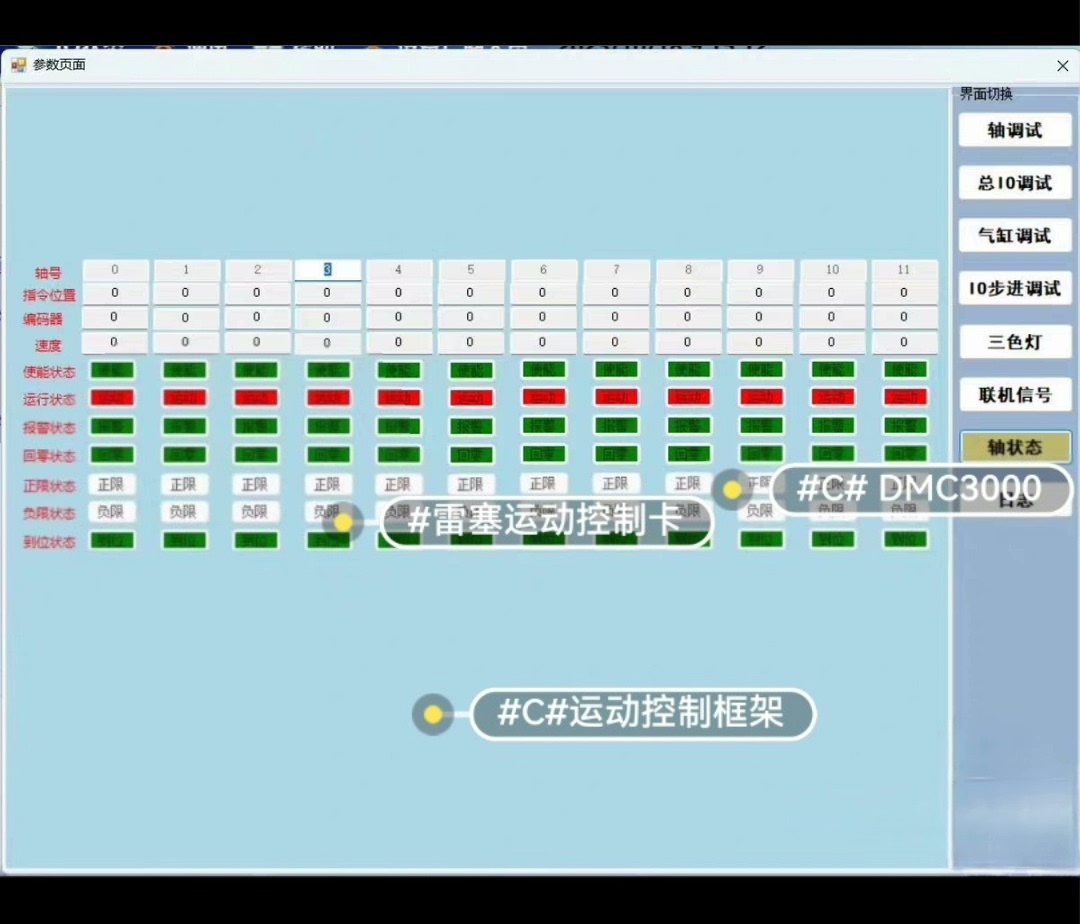
雷赛DMC3400/DMC3C00控制卡控制系统代码基于C#语言开发,适配.NET Framework 4.5框架,主要应用于自动辅料贴装设备。该系统具备良好的兼容性,通过替换库文件等代码,可适配高川控制卡、固高运动控制卡、正运动控制器等多种控制硬件,实现对设备运动、IO信号、视觉数据、PLC通信等多方面的精准控制与管理,同时具备完善的报警、日志及参数配置功能,为自动辅料贴装设备的稳定运行提供全面
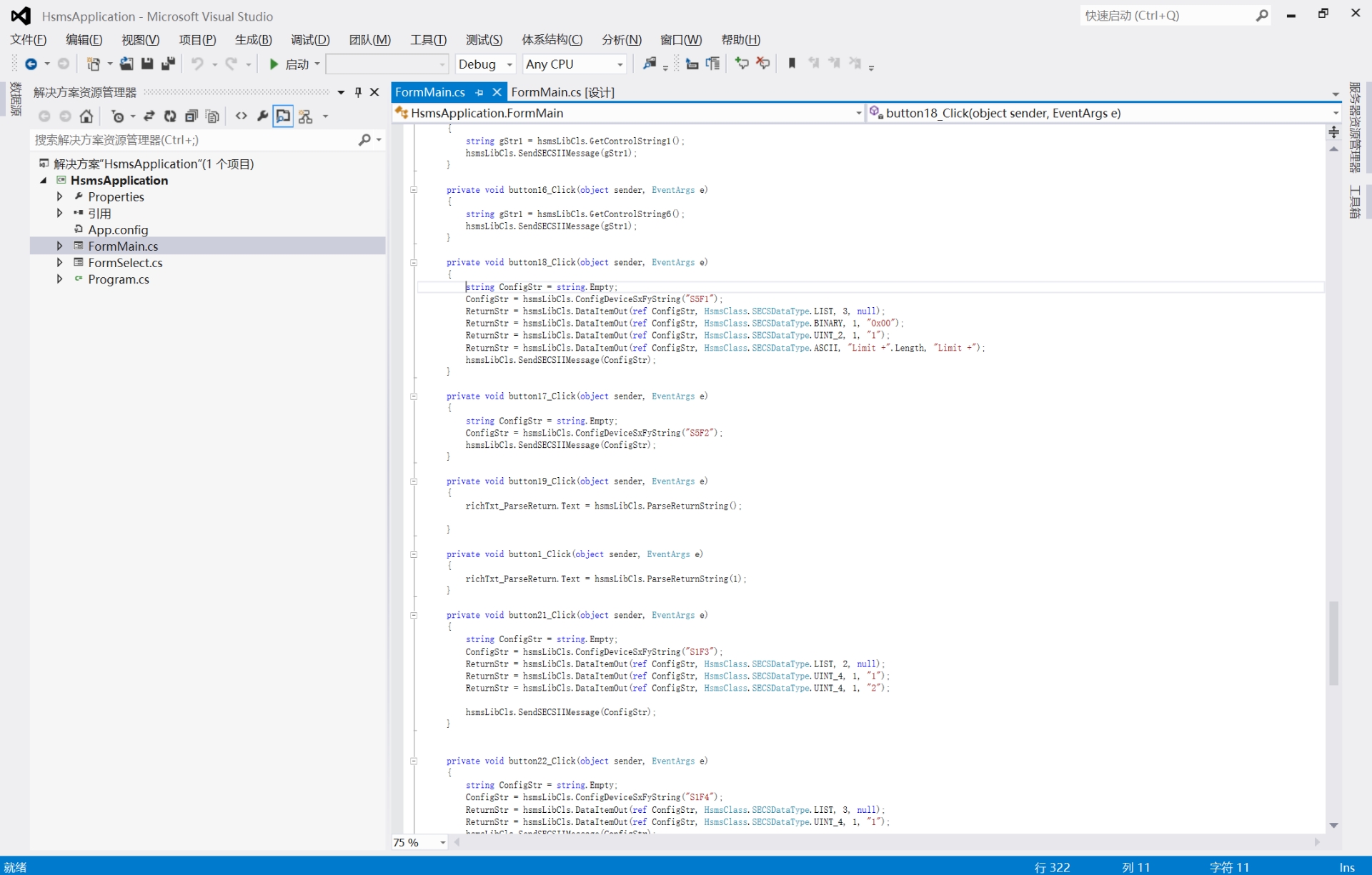
HSMS(High-Speed SECS Message Services)协议是半导体行业中设备与主机系统之间通信的重要标准。本项目实现了一个完整的HSMS协议通信库及图形化测试工具,支持多种数据类型传输和标准SECS消息处理。该HSMS协议通信解决方案为半导体设备通信提供了完整的技术支撑,既可用于生产环境的设备集成,也可用于开发和测试阶段的功能验证。其清晰的架构设计和丰富的功能特性使其成为半导
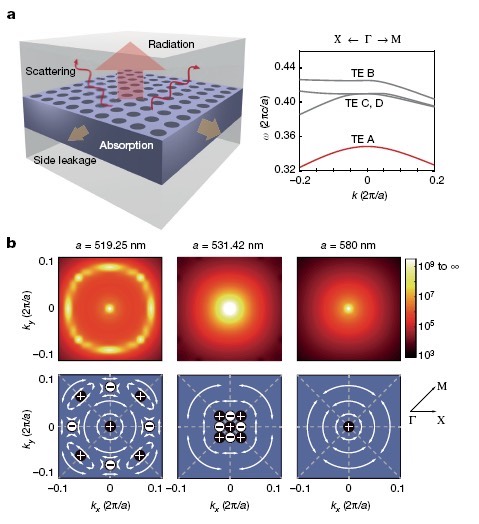
comsol光子晶体仿真。拓扑荷调控merging BIC,包含三维Q,Q因子计算。远场偏振计算。在光子晶体领域的研究中,Comsol 是一款极为强大的仿真工具,今天咱们就来唠唠如何用它实现拓扑荷相关、调控merging BIC以及三维Q因子计算和远场偏振计算这些有趣的事儿。
今天咱就结合手头这份详细的知识文档,来唠唠这其中的门道,文档里不仅有LLC谐振半桥计算,还有全桥LLC谐振和变压器的计算,并且配有表格及引用公式依据,理解起来方便多了。全桥LLC谐振相比半桥,在功率传输等方面又有一些不同的特性和计算要点。这只是最基础的一个小计算示例,实际的LLC谐振半桥计算会涉及到更多参数,像励磁电感、开关频率与谐振频率的关系等等,这些在文档的表格和公式里都有详细说明。看截图,知
WINCC报表 VBS脚本链接SQL Server数据库 日报月报 导出EXCEL PDF1.登录界面:输入正确的用户名、密码,可进入系统2.主控画面:对于每一工作站不同的工作状态显示不同的颜色3.录入数据:手动输入数据并存储于数据库,通过Code从数据库中查询出数据或删除数据库数据;按时间段查询数据库数据,并可打印、导出Excel、PDF。(也可自动录入)4.日报月报:日报、月报报表功能。
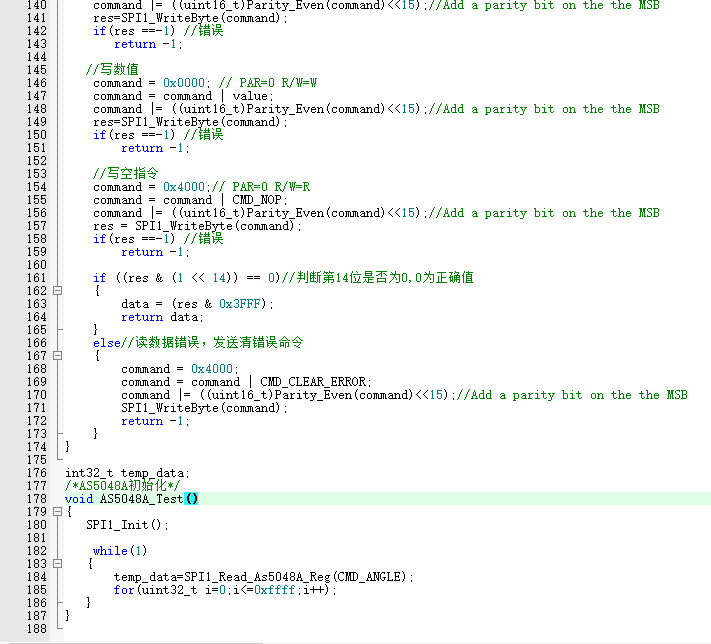
遇到最玄学的问题是SPI时钟速率——当主控芯片发热时,过高的SPI速率会导致数据错乱。如果需要更高精度,可以开启AS5048A的DAEC功能(动态角度误差补偿),不过那得改配置寄存器,下回再细说。这里最容易翻车的是数据长度设置——AS5048A的SPI帧是16位的,但很多教程写成8位模式,直接导致数据错位。这里用预先计算好的查找表替代实时计算,既保证速度又避免堆栈溢出(实时计算需要移位操作,在中断
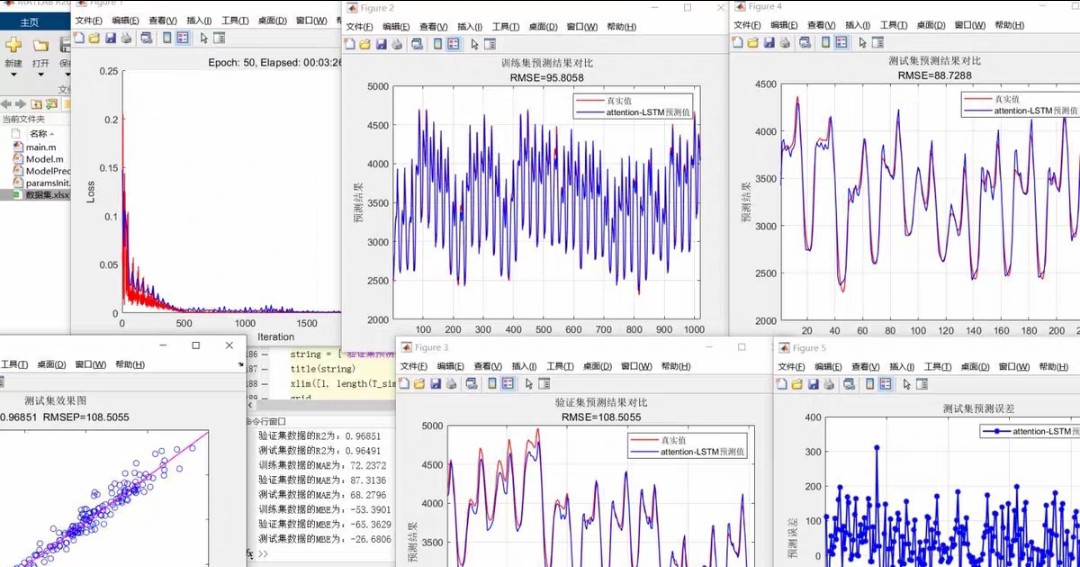
实测某工业数据集(12个特征)效果比普通LSTM的MAE降低23%,R²从0.81提升到0.89。替换自己的数据只需要修改readtable路径和特征列索引即可,注意保持时间序列连续性别乱序。时序预测中特征重要性不同是常见痛点,Attention机制能自动捕捉关键时间点。咱们用Matlab搭建个带注意力门的LSTM网络,实测某电力负荷数据集(可替换自己的csv文件)。这里的关键是attention
MDIN380 SDI转VGA 转LVDS VGA转SDI高清视频处理 MDIN380芯片PCB代码方案资料3G-SDI转VGA?3G-SDI转LVDS?高清视频 MDIN380、GV7601 芯片方案(PCB图和源码)。此方案是韩国视频处理芯片MDIN380的整合应用方案。3G-SDI转VGA或3G-SDI转LVDS。方案共有两块电路板(一块底板,一块MDIN380核心板 四层板)。MDIN38
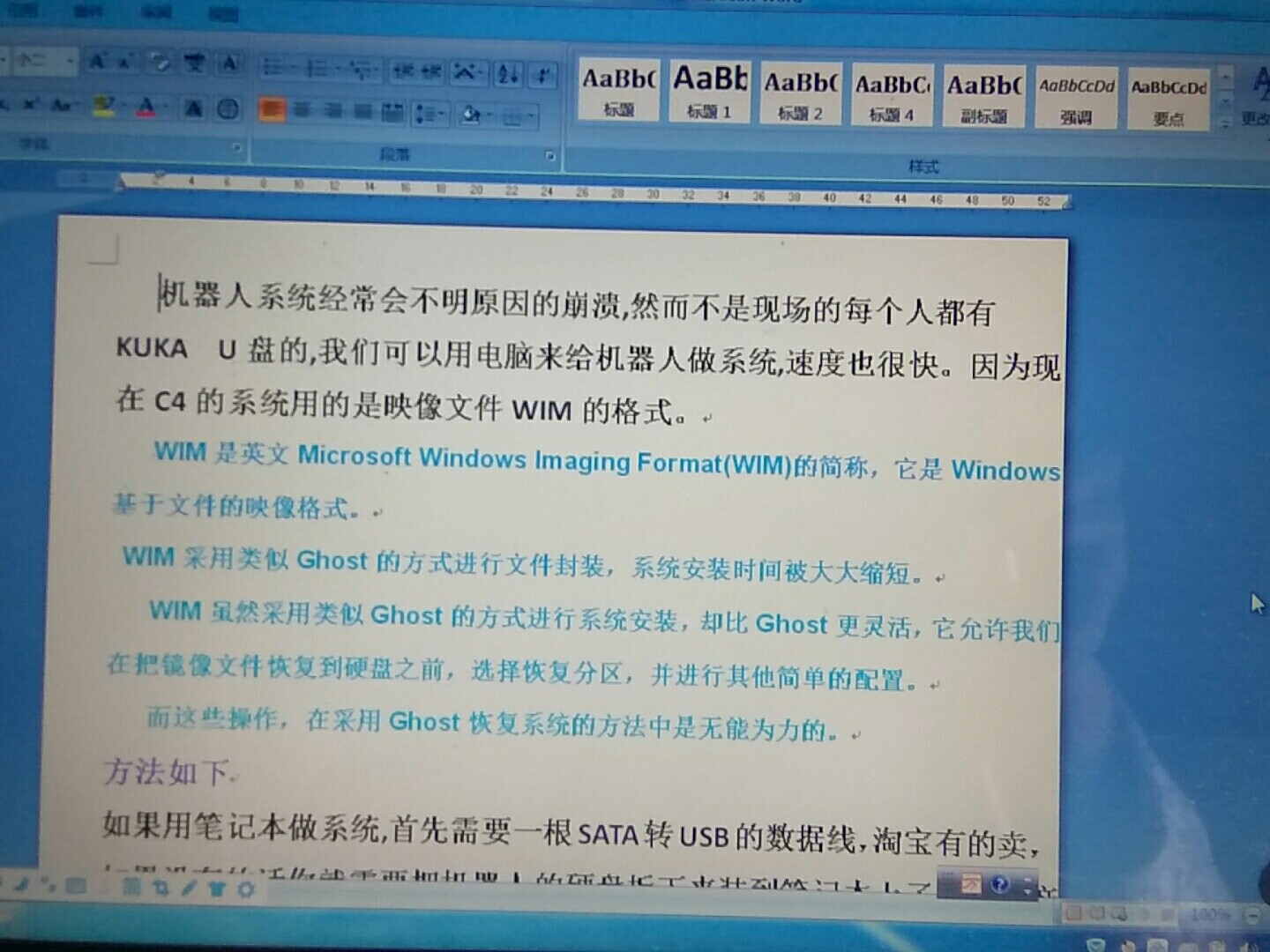
库卡机器人KUKA无专用U盘的系统急救方法库卡机器人KUKA无专用U盘的系统急救方法可用普通U盘恢复机器人的系统内有详细使用操作方法在工业自动化领域,库卡机器人KUKA可是一把好手,不过就像人会生病一样,机器人偶尔也会闹点小脾气,系统出个故障啥的。一般来说,库卡机器人有专用U盘来恢复系统,但有时候专用U盘不在身边,这可咋办?别慌,其实用普通U盘也能完成系统恢复,今天咱就来唠唠这个无专用U盘的系统急