- @2503_94141438
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
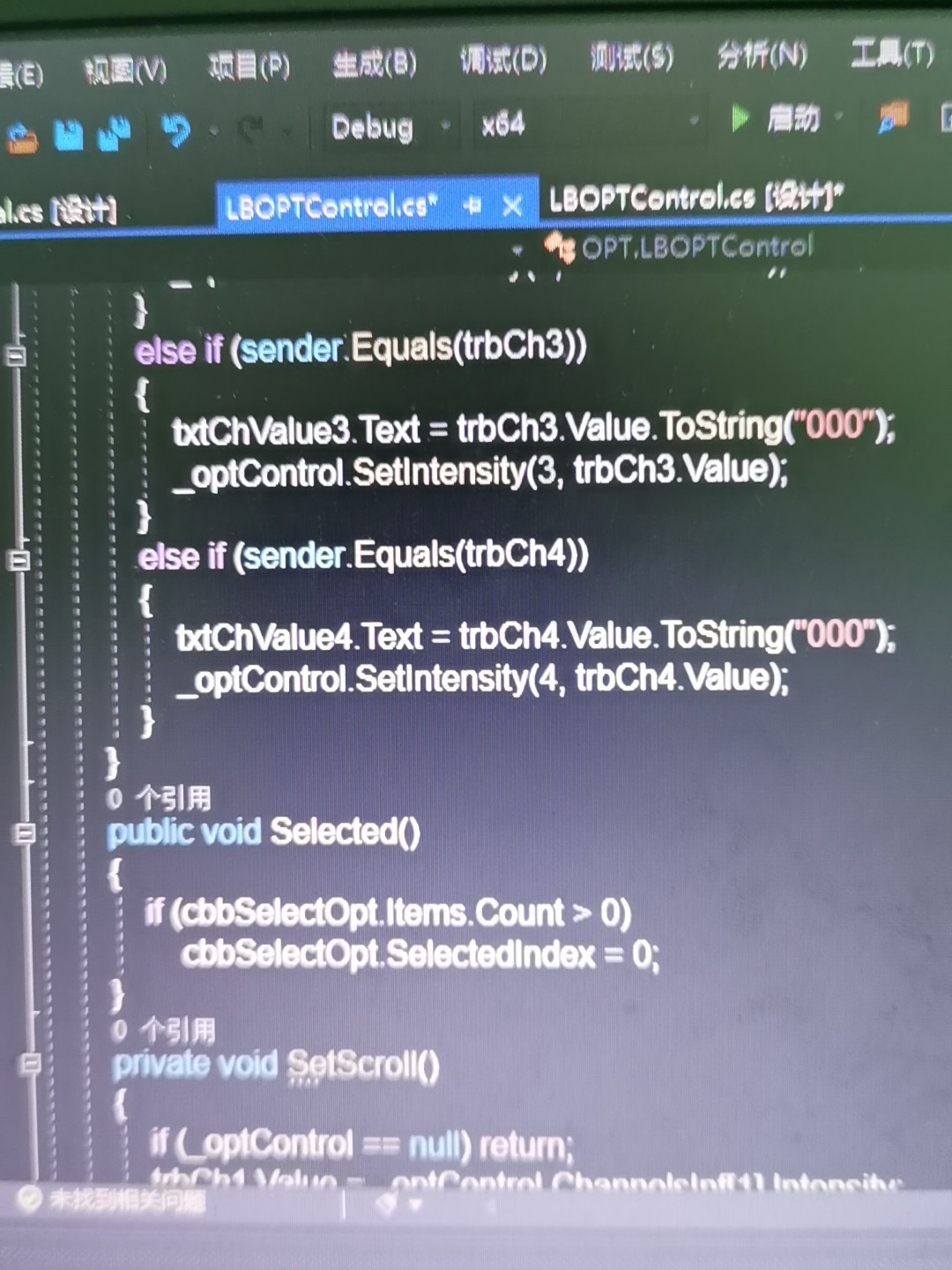
但对于常规的工业场景,这玩意儿的开发效率确实能打。源码里的注释虽然不算详细,但关键位置都有//警告标记,比如这个图像缓存池的实现就标注了线程安全注意事项。注意看注释里的"自动映射"——这波封装直接把Halcon的HTuple类型转成了C#的double数组。底层其实把Halcon的HDev脚本转成了C#的扩展方法,每个模块背后都是预编译的hdev文件。拖拽式编程,无halcon基础也能上手,匹配,

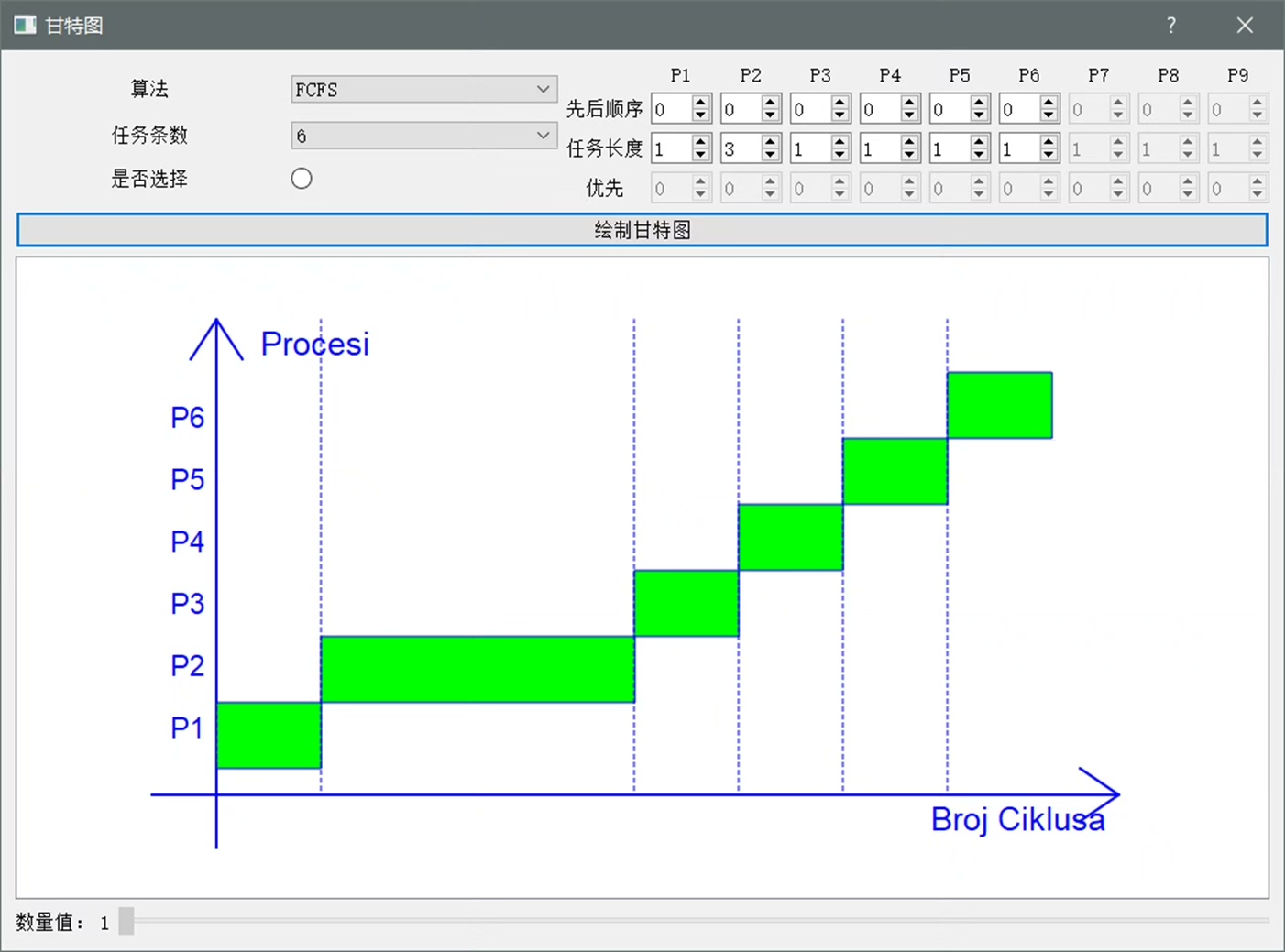
通过以上方法,我们实现了一个功能完善的甘特图控件。使用GraphicsView实现高效的图形渲染灵活的任务条管理接口支持任务条的分段显示优秀的跨平台兼容性如果你有更多的需求,可以在现有代码基础上进行扩展和优化。
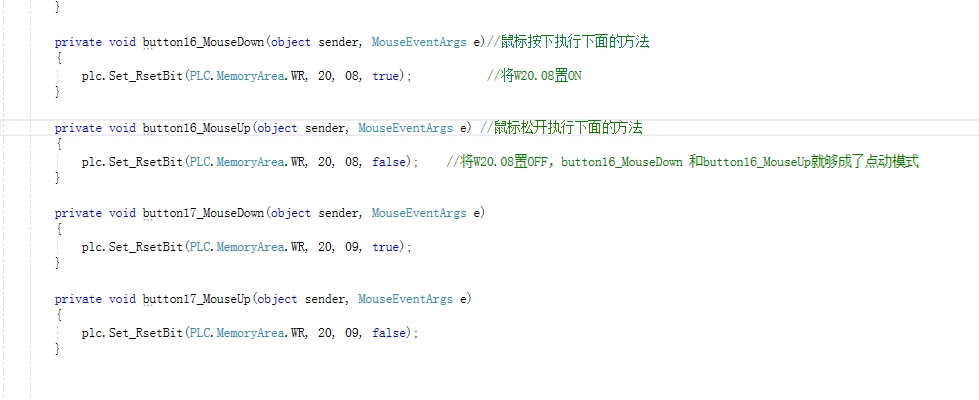
半夜两点盯着欧姆龙PLC的绿灯狂闪,手里的串口调试助手突然蹦出一行正确的返回帧——这感觉比抢到茅台还刺激。今天就聊聊怎么用C#手搓Fins HostLink协议,这玩意儿在工控圈子里就像USB接口一样常见,但底层通讯的坑比秋名山弯道还多。C#写的欧姆龙Fins HostLink协议底层通讯代码,串口通讯源程序,自己研究通讯写的,已测试OK,共有800多行代码,可以了解欧姆龙Fins HostLin
要说改进空间,可以加个AutoMapper把DataTable转实体对象,这样业务层就不用到处写dt.Rows[0]["Name"].ToString()这种魔法字符串了。ASP.NET的母版页内容渲染顺序是:母版页head先加载,内容页的head后加载。基于ASP.NET和sql server开发的简单学生信息管理系统、成绩管理系统,实现了学生管理、课程管理、成绩管理、班级管理、教师管理、用户管

最近在车间里折腾了一套基于C#的运动控制+视觉定位系统,今天就跟大伙唠唠实战中的那些代码片段和踩坑经验。这代码有个坑爹的地方——很多运动控制卡的dll是32位的,记得把项目平台目标改成x86,不然运行时直接给你抛DllNotFoundException。有次现场光照变化,这个值没调好,直接把工件旁边的螺丝孔识别成目标了,结果机械臂上演了一出"大力出奇迹",场面一度非常尴尬。有次学徒忘了这个负号,机
咱们今天要聊的这个C#+Halcon项目,直接把标定、通信、界面这些实用功能打包成了完整解决方案。注意第三个参数标定板描述文件必须和实际使用的标定板物理参数完全匹配,否则误差能差出个马里亚纳海沟。最后说个真实案例:某次现场调试发现标定误差忽大忽小,最后发现是串口通信的校验位设置成None导致数据错位。项目源码里有个魔鬼细节:标定数据保存时用了二进制序列化,但机器人的坐标系数据需要转成ASCII格式

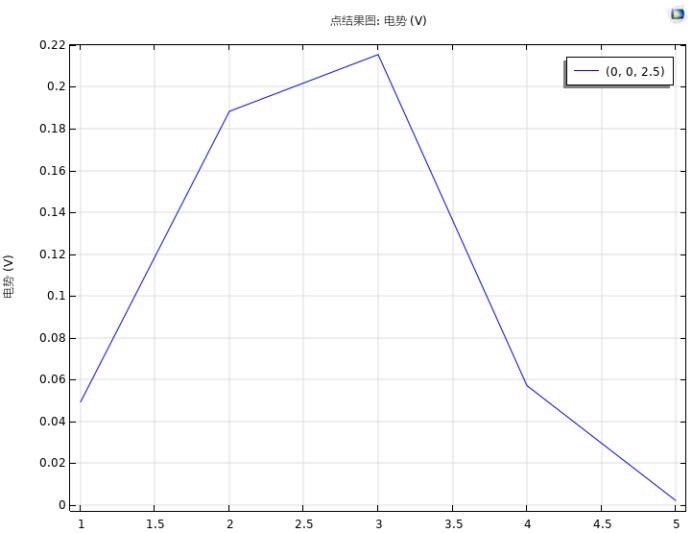
通过这样的仿真计算模型,我们能够直观地看到纳米摩擦发电机在不同电极距离下的电势和电场分布情况,对于深入理解其工作原理和性能优化都有很大的帮助🧐。当我们改变电极距离的时候,再重新运行求解代码,就可以观察到电势和电场分布的变化😎。比如说,电极距离变小,电场强度会明显增大,电势的变化也会更剧烈。简单来说,就是利用静电场的特性来分析不同电极距离下模型的电势和电场分布情况🧐。Comsol纳米摩擦发电机
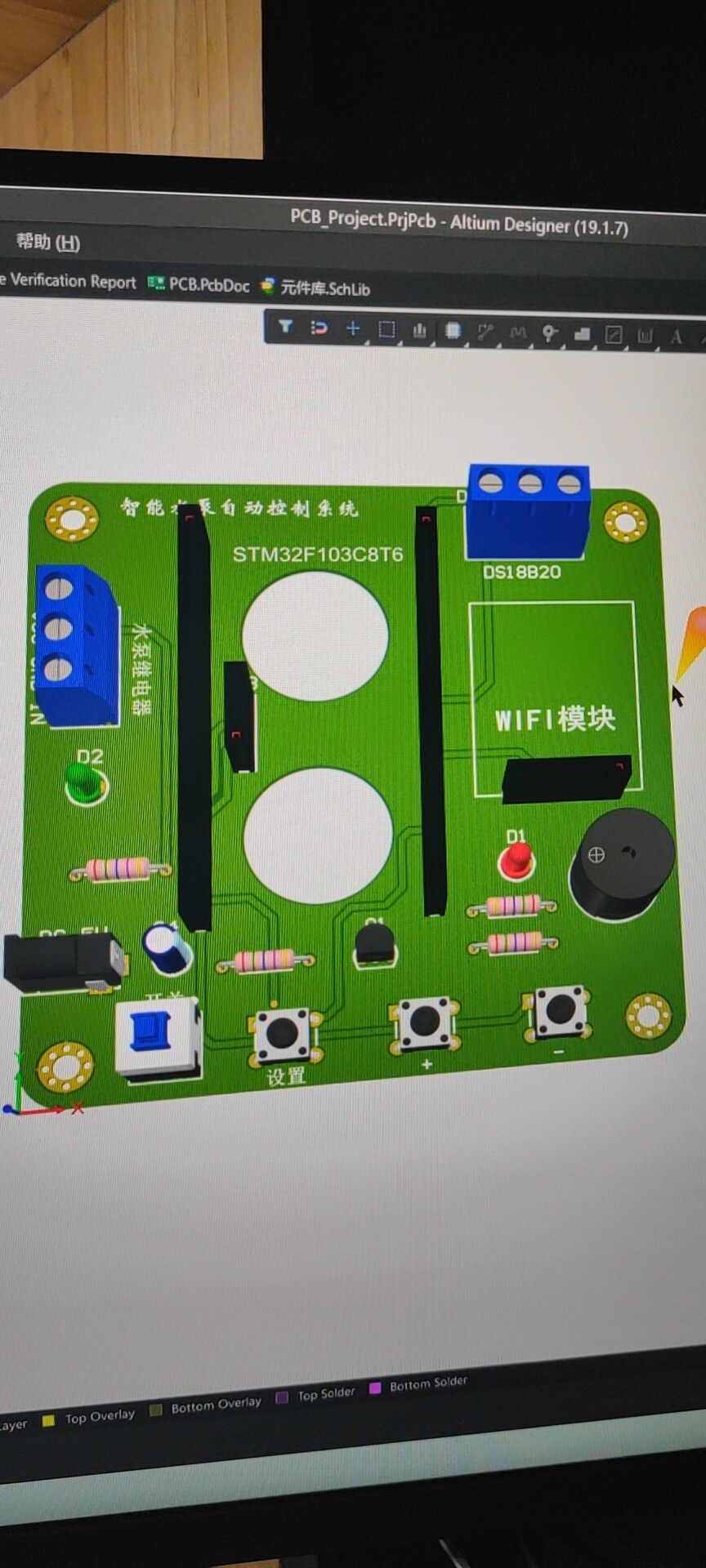
先上干货,整个系统用STM32F103C8T6当大脑,超声波测水位,DS18B20测水温,继电器控制水泵。实测发现水温变化会影响声速,后来在代码里加了温度补偿公式:声速=331.4 + 0.6*T,水温25℃时误差从3cm降到了0.5cm。今天带大家用STM32搞个全自动水位水温控制系统,手机点两下就能远程管理,连阿里云都接上了,卷死隔壁用机械浮球的老王!建议用阿里云官方提供的计算工具生成认证信息
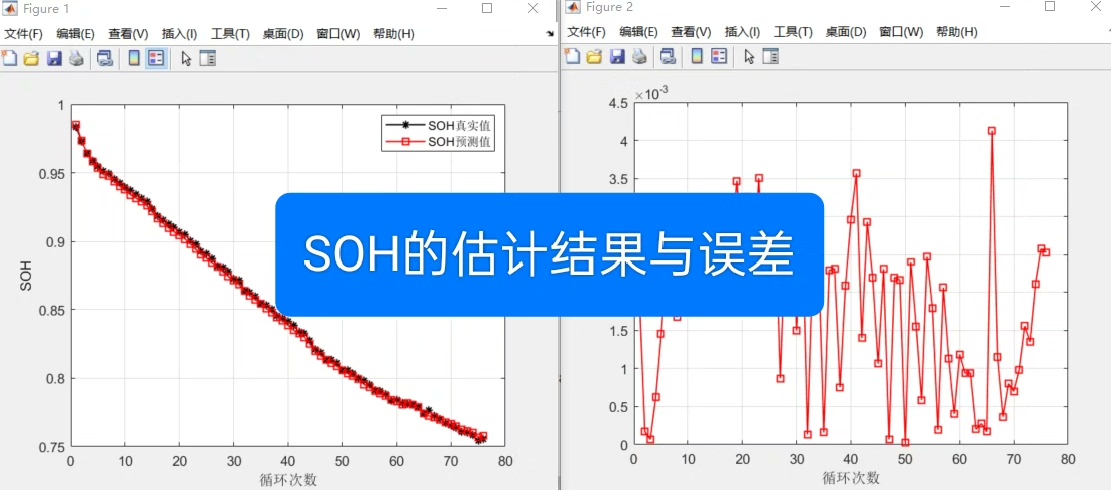
定义(充电数据)与(放电数据)两个结构体,每个结构体包含7个关键字段::相对时间(单位:s);voltage:电压(单位:V);current:电流(单位:A,充电为正,放电为负);:温度(单位:℃);SOC:荷电状态(State of Charge,0-1之间);SOH:健康状态(基于容量计算,1为全新状态)。% 输出维度:SOH(1个值)% 输入维度:4个健康特征% LSTM隐藏层节点数(经验
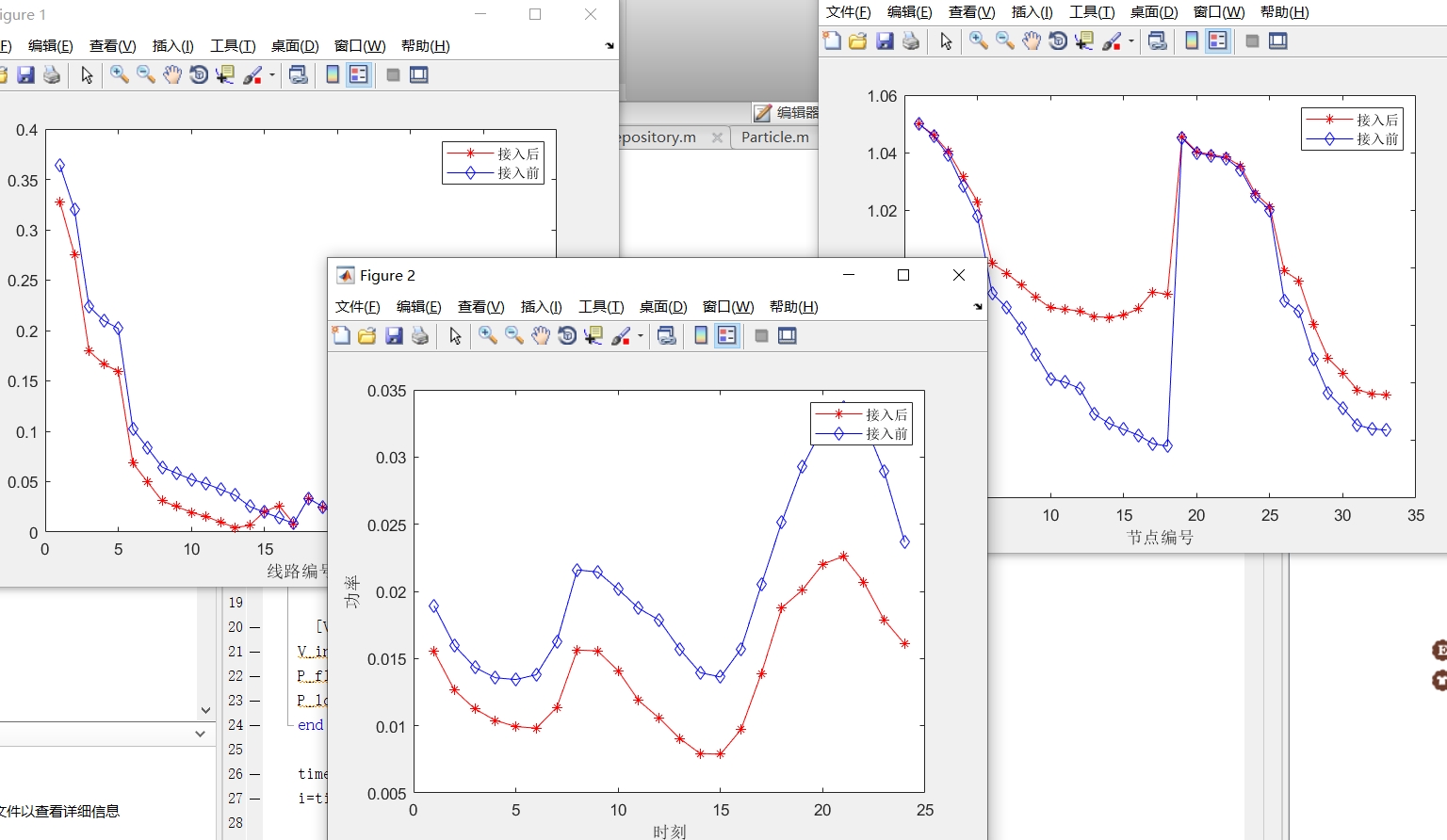
该代码系统是一个功能完备、结构清晰的配电网时序潮流分析工具。它成功地将分布式电源和电动汽车的时序特性融入到经典的潮流计算框架中,为理解和优化未来主动配电网的运行提供了重要的仿真基础。其设计思路和实现方法对于从事智能电网、综合能源系统等领域研究与开发的工程师和学者具有很高的参考价值。